
Fターム[5J062BB04]の内容
Fターム[5J062BB04]に分類される特許
21 - 36 / 36
周波数応答整合を使用した無線周波数ナビゲーション
無線ナビゲーションの方法は、多数の可能性のあるデバイス位置のそれぞれに対して周波数応答を予測する工程を含み得る。方法はまた、実際のデバイス位置において周波数応答を測定する工程も含み得る。方法は、測定周波数応答を予測周波数応答の1つと整合させて、推定デバイス位置を決定する工程であって、推定デバイス位置は、測定周波数応答に最も密接に整合する1つの予測周波数応答に関連付けられた可能性のあるデバイス位置に対応する、工程をさらに含み得る。  (もっと読む)
(もっと読む)
現在の放送軌道暦を使用しない位置の確定
長期間にわたって放送軌道暦データを使わずに位置情報を確定するための装置と方法について記載する。放送軌道暦から確定される衛星状態を格納し、この格納された衛星状態に関する運動方程式を数値積分して、現在の衛星状態を確定するクライアント装置が開示される。クライアント装置は、受信された衛星信号と共に現在の衛星状態を使用して、この衛星信号がどこで受信されたかを確定する。 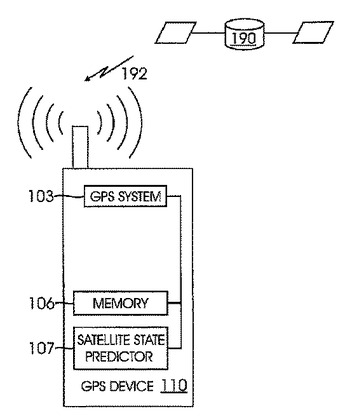 (もっと読む)
(もっと読む)
軌道推定方法とその装置

【課題】既設置の発信局から移動体に到達する電波を用いることにより新規に送受信機を必要としない軌道推定方法とその装置を提供する。
【解決手段】軌道推定方法は、複数の送信局から複数の移動体に電波を同時に送信し、2局の受信局において、上記移動体に搭載された中継器により中継送信された電波を受信し、上記受信した電波から上記移動体に係わる到来時間の差およびドップラー周波数の差を検出し、上記複数の移動体の軌道を示す未知変数以上の到来時間の差およびドップラー周波数の差を得ることのできる局数の送信局が存在するとき、得られた到来時間の差およびドップラー周波数の差から直接上記移動体の軌道を推定する。
(もっと読む)
人工衛星に搭載した水晶発振器の時刻同期方法及びシステム

【課題】擬似時計技術はこれまではさまざまな遅延モデルを用いなければ実現できなかったが、本発明は、複数周波数の測位信号を用いることにより複雑な遅延モデルを用いなくても実時間で、予測伝搬時間の推定に誤差が含まれていても実現する。
【解決手段】本発明の地上局の時刻標準と人工衛星に搭載した水晶発振器の時刻を同期させる時刻同期方法は、地上局からは、人工衛星に到着したときに正確にその時刻になるように制御するため、種々の遅延原因に基づく遅延量を進めた時刻を発信する。測位信号の周波数差による遅延量の違いを利用するため複数の異なる周波数を用いて、地上局と人工衛星の間を測位信号が伝搬する時間を、それぞれ求める。測位信号受信機で測定した複数の擬似距離を光速度で除した遅延量とあらかじめ計算しておいた予測伝搬時間に基づき遅延補正量を演算し、この遅延補正量を前記遅延量に加えて進める。
(もっと読む)
エフェメリス拡張システムとGNSSでの使用方法
【課題】 全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】 放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
(もっと読む)
衛星の天体暦誤差
衛星の天体暦誤差を補償または補正する方法は、様々な地理的位置における較正送信機(42a〜42d)から2機の衛星(34、46)を介して受信される信号レプリカの到達時間差(TDOA)および到達周波数差(FDOA)を測定するステップを含む。TDOAおよびFDOAの測定値に最良適合するTDOAおよびFDOAの推定値を与える天体暦変化を計算するために、位置ベクトルと速度ベクトルからなる初期衛星天体暦が使用される。これは、初期衛星天体暦の誤差を補償または補正するために必要な推定変化を提供する。この方法は、大きい天体暦変化を処理するために反復されてもよい。すなわち、1回の反復で得られる変化は、次の反復において新たな初期天体暦として使用される天体暦を補正するために使用されてもよい。この方法は、1機または2機の衛星の天体暦誤差を補正するために使用されてもよく、そうであれば、さらに多くの較正送信機EphemCal 1〜EphemCal 10が使用されてもよい。  (もっと読む)
(もっと読む)
軌道決定装置、軌道決定方法、及びコンピュータプログラム
【課題】宇宙機の軌道を、簡易な設備で高精度に求めることができるようにする。
【解決手段】位相差検出装置61は、受信装置40a〜40cにおけるテレメトリ信号30の受信時間差を位相差として検出し、データ解析装置62は、位相差検出装置61で検出されたテレメトリ信号30の位相差の時間変化率を求め、求めたテレメトリ信号30の位相差の時間変化率を用いて、宇宙機20の軌道10を求める。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 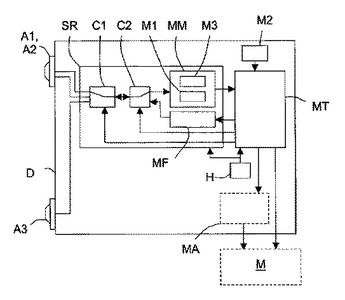 (もっと読む)
(もっと読む)
電離層遅延補正方法、電離層遅延補正システム、地上局および移動局
【課題】情報量一定という条件下で、IGP(電離層グリッドポイント)の電離層遅延量の補正情報の送信方法を変更し、GPS測位精度を向上させることを可能とする。
【解決手段】5分ごとの所定時間間隔よりも長い時間間隔で、緯度5度×経度5度の所定間隔よりも狭い間隔で配置された各IGPの電離層遅延量の補正情報を、地上局40のIGP電離層遅延量補正情報送信部40aから静止衛星20経由で放送し、移動局41において、受信されたIGPの電離層遅延量の補正情報に基づいて、移動局41の電離層遅延量補正情報算出部41aにて、当該移動局41における電離層遅延量の補正情報を算出して、GPS測位情報を補正する。ここで、IGPの空間的な配置位置を前記所定間隔よりも(例えば、1/2の)狭い間隔とした割合に応じて、各IGPにおける前記電離層遅延量の補正情報を放送する時間間隔を、前記所定時間間隔よりも(例えば、2倍)長くする。
(もっと読む)
電離層遅延量推定システム
【課題】GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定するシステムを提供する。
【解決手段】GNSS衛星1から送信されるデータを観測する観測局を地上局2に限らず海上に対しても海上局3を設置し、各地上局2および海上局3では、GNSS信号を受信すると、ジオメトリー・フリー信号および搬送波バイアス推定値を生成し、これらの信号を中央局6に高速通信回線4またはデータ中継衛星5を経由して送信し、中央局6では、これらのデータに基づいて電離層遅延量をリアルタイムで推定し、ユーザUに送信する。
(もっと読む)
衛星ナビゲーションのための方法及びシステム
【課題】衛星ナビゲーションのためのシステム及び方法を提供する。
【解決手段】一実施形態では、衛星ナビゲーション・システム用のモバイル・ユニットが開示される。このモバイル・ユニットは、衛星ビークルへ要求無線信号を送信する手段と、1又は複数の衛星ビークルの軌道座標を含む応答無線信号を受信する手段と、要求無線信号を送信する手段と応答無線信号を受信する手段とに応答するものであり、送信された要求無線信号と受信された応答無線信号とに基づいて到来時間差レンジを計算することにより、衛星ビークルまでのレンジを計算する手段と、レンジを計算する手段に応答するものであり、少なくとも3つの衛星ビークルまでのレンジと少なくとも3つの衛星ビークルの軌道座標とに基づいて位置を計算する手段とを備える。
(もっと読む)
移動局ナビゲーション装置および移動局ナビゲーションプログラム
【課題】 衛星用アンテナやFPU用アンテナを搭載したSNG伝送車(移動局)において、通信衛星やFPU基地局の位置関係を視覚的に提示することが可能な移動局ナビゲーション装置を提供する。
【解決手段】 移動局ナビゲーション装置1は、測定装置2から測定情報を入力する測定情報入力手段11と、測定情報と衛星位置情報とに基づいて、通信衛星の方位情報を算出する衛星方位情報算出部13aと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、通信衛星のアイコンを表示する衛星位置表示部151aと、測定情報と基地局位置情報とに基づいて、中継基地局の方位情報を算出する基地局方位情報算出部13bと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、中継基地局のアイコンを表示する基地局位置表示部151aと、を備える構成とした。
(もっと読む)
アップリンク干渉源位置特定装置及びその方法
【課題】 アップリンク干渉源の位置を短時間で容易にかつ精度よく特定可能とする。
【解決手段】 2つの受信アンテナ10〜11で、2つの衛星経由のダウンリンクを受信し、2系統での受信信号を同時にADサンプリングしてデジタルデータを取得し、相関処理部40にて、到達時間差、ドップラ周波数差を算出するための相関処理を行う。一方、衛星位置算出処理部50にて、電波を受信している2衛星の測定した時刻における位置を算出する。発射源位置推定処理部60にて、相関処理部40で得た到達時間差、ドップラシフト周波数差の情報と、衛星位置算出処理部50で得た測定時刻における衛星位置、速度の情報を用いて、地上局の位置を推定し、表示部70にて、到達時間差の軌跡とドップラ周波数差の軌跡との交点の座標を地図上にプロットして、電波発射源の位置推定結果を表示する。
(もっと読む)
方探システム
【課題】 従来の複数センサを用いた方法において、遠方からの発信源の到来方向を測定する場合、センサのビーム幅に応じた観測誤差が生じてしまう。
【解決手段】 方探センサ1が取り付けられたプラットフォーム2を高高度に2つ以上位置させ、方探センサの間隔を広く配置して、不審電波を探知するために方探センサ1を発信源3に対して指向させる。各方探センサ1により探知された発信源3の到来方向及び位置情報は解析装置4へと出力し、方探センサ1を搭載したプラットフォーム2は高度に位置しており、発信源3からの電波を受信する距離方向の領域は、センサの垂直方向のビーム幅に依存する。
よって、距離方向の観測領域を精度良く特定することができ、各方探センサ1の位置、信号の到来方向及び観測領域から交差する点を測定することにより、遠方の発信源3の位置を特定することができる。
(もっと読む)
カメラの位置及び姿勢情報補正方法及びその装置
【課題】カメラに装着された3ラインスキャナーを介して得られる画像情報を分析し、カメラの位置と姿勢情報とを精密に補正できるようにする方法及び装置を提供すること。
【解決手段】衛星航法装置を用いてカメラの位置を計算するステップと、慣性航法装置を用いてカメラの姿勢を計算するステップと、カメラに装着された3ラインスキャナーを介して入力される画像を分析し、カメラの位置及び姿勢補正情報を生成するステップと、生成された位置及び姿勢補正情報をそれぞれ衛星航法装置と慣性航法装置とにフィードバックするステップとを有する。3ラインスキャナーを介して入力される画像は、前方スキャナー観測画像、直下スキャナー観測画像及び後方スキャナー観測画像とから構成される。人工衛星や航空機、車両などの輸送手段に搭載されたカメラを介して観測された画像に対し、地上基準点を使用しなくともカメラの外部標定要素を精密に決めることができる。
(もっと読む)
ナビゲーション用途のための、改良されたGPS累積デルタ距離処理方法
移動物体の位置と速度の測定に使用されるGPSナビゲーション技術において、擬似距離(PR)測定値および累積デルタ距離(ADR)測定値が、物体において受信GPS信号から生成される。ナビゲーションパラメータ(例えば位置、速度、クロック)はPR測定値、およびADR測定値の間の差から推定される。本明細書で述べるADR測定式は、よりいっそう精密な方法で公式化され、ADR測定値の間の差を計算する時間間隔は、現在のGPS用途のADR差分手法で使用されるものよりもはるかに大きい。故にADRの差はより正確であり、非常に精密なナビゲーションソリューションを生じる。ADR差分手法はカルマンフィルター処理の収束時間短縮に寄与し、宇宙飛行体のナビゲーション精度を向上する。これらの高精度なADR処理アルゴリズムを統合型GPS/IMUナビゲーション用途に拡げるための技術も提供される。  (もっと読む)
(もっと読む)
21 - 36 / 36
[ Back to top ]