
Fターム[5J062BB04]の内容
Fターム[5J062BB04]に分類される特許
1 - 20 / 36
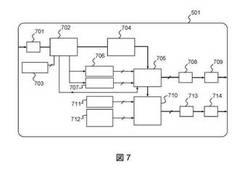
オーグメンテーションシステムの衛星ペイロード
【課題】
オーグメンテーションシステムの衛星ペイロードを提供する。
【解決手段】
本発明は、第1の周波数帯域において少なくとも1つの航法陸上地球局(NLES)により送信された航法信号を受信するのに好適な入力チャネル(201、202、503)と、それぞれが第1の帯域および他の同報通信帯域と異なる周波数帯域において航法信号を同報通信するのに好適な複数の出力チャネル(206、207、208、216、217、218)と、を含むオーグメンテーション衛星(600)のペイロードであって、航法プロセッサ(501)も含むことを特徴とするオーグメンテーション衛星(600)のペイロードに関する。本発明はまた、このようなペイロードを含む衛星とこのような衛星を含むオーグメンテーションシステムとに関する。
(もっと読む)
測位装置

【課題】衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができるようにする。
【解決手段】複数の候補位置pc毎に、電波が衛星#1,#2に到来する時間τ1(t),τ2(t)を算出する移動補償量計算部2と、到来時間τ1(t),τ2(t)を用いて、衛星#1,#2の受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、補償後の受信信号間の内積値cor(pc)を算出する内積値計算部4とを設け、複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
(もっと読む)
信号トランスポンダ
【課題】高精度で信号の周波数範囲を変換し、遠隔信号キャラクタリゼーションに適用可能なトランスポンダを提供することである。
【解決手段】本発明は、未知の信号源からの信号の周波数変換のための信号トランスポンダであって、未知の信号源から信号を受信するための入力手段と、受信した信号をフィルタリングするための入力フィルタと、受信した信号を増幅するための入力信号増幅器と、増幅されフィルタリングされた、受信した信号の周波数を、所定の周波数に変換するためのミキサと、周波数変換のために、ミキサに供給されるクロック信号を発生させるための局部発振器と、周波数変換された信号をフィルタリングするための出力フィルタと、周波数変換された信号を増幅するための出力信号増幅器と、フィルタリングされ増幅された、周波数変換された信号を送信するための出力手段とを備える、トランスポンダを提供する。
(もっと読む)
バイアスがかかった測定値に基づいた衛星航法システムの誤り検出
【課題】本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
(もっと読む)
衛星測位システム及び測位信号受信機
【課題】TTFF短縮と測位精度向上とを両立させた測位信号受信機及び衛星測位システムを提供する。
【解決手段】全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される。
ことを特徴とする。
(もっと読む)
衛星航法システム受信機、その制御方法、電子デバイス、及びその制御方法
【課題】衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定する技術を提供する。
【解決手段】電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて送信された前記電子デバイスから第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
(もっと読む)
受信装置、受信方法及び携帯端末
【課題】スリープ期間における平均電力及びピーク電力の低下を図ることが可能な受信装置を提供する。
【解決手段】衛星からの信号を受信する受信部と、受信信号の周波数を所定の中間周波数に変換する周波数変換部と、同期捕捉とキャリア周波数の検出とを行う同期捕捉部と、中間周波数信号に含まれるメッセージを復調する同期保持部と、を備え、同期保持部は、拡散符号に同期する拡散コードを生成する拡散コード生成部を含み、同期保持部は所定の周波数で発振する温度補償された発振器を発振源とするクロックで動作するカウンタを参照し、測位動作を行わないスリープ期間においてはカウンタのみを動作させ、スリープ期間が終了すると、制御部は前記カウンタで計測された経過時間から拡散コード周期の開始点を衛星毎に予測計算し、予測された開始点に合わせて衛星毎に割り当てられた拡散コード生成部を起動させる、受信装置が提供される。
(もっと読む)
無線基地局、サーバ、無線基地局システム、および無線基地局システムの同期方法
【課題】多数のサーバを設置することなく、無線基地局において、GPS衛星からの軌道情報を良好な感度で受信することを可能とする無線基地局、サーバ、無線基地局システム、および無線基地局システムの同期方法を提供する。
【解決手段】GPSモジュール10は、GPS衛星から軌道情報を受信する。軌道情報要求部11は、GPSモジュール10においていずれかの軌道情報を受信できなかった場合に、無線基地局へ受信できなかった軌道情報の送信を要求する。アシストデータ生成部14は、要求に応じて、無線基地局から送信される軌道情報およびGPS衛星から受信した軌道情報とを含むアシストデータを生成する。アシストデータ提供部13は、生成したアシストデータを無線基地局に提供する。
(もっと読む)
タイミング同期装置、タイミング同期方法
【課題】基準タイミング信号に自装置の内部タイミング信号を正確に同期させるタイミング同期装置を提供する。
【解決手段】所定の時間間隔を示す基準タイミング信号と基準タイミング信号に対応する基準時刻を示す基準時刻情報とを取得する取得部と、クロック周波数を有する内部クロック信号を生成するクロック生成部と、内部クロック信号に基づいて、所定の時間間隔を示す内部タイミング信号と内部タイミング信号に対応する時刻を示す内部時刻情報とを生成する時刻情報生成部と、基準タイミング信号と内部タイミング信号、及び、基準時刻情報と内部時刻情報を比較することにより、基準タイミング信号に対する内部タイミング信号の進み又は遅れを検出し、且つ、基準タイミング信号に対する内部タイミング信号の位相の進み量又は遅れ量を検出する検出部と、位相の進み量又は遅れ量に応じてクロック周波数を調整する調整部と、を備えるタイミング同期装置。
(もっと読む)
衛星測位受信機
【課題】測位信号の受信において、擬似距離生成が開始されるまでの時間を短縮して、TTFFをより短縮する。
【解決手段】SPS用受信アンテナで受信されたRF信号にフロントエンド処理を行うフロントエンド手段と、フロントエンド処理により得られたデジタル信号に対して信号捕捉および追尾処理を行って信号伝播時間を得るベースバンド処理手段と、当該信号伝播時間に基づき疑似距離計算および測位計算を行う航法計算手段とを備え、ベースバンド処理手段が、複数の衛星のうち、一番最初に航法データをデコードして信号が送信されたSPSシステム時刻を得た基準衛星については、従来手法どおりにそのシステム時刻を使って信号伝播時間を算出し、それ以外の衛星については、その衛星と基準衛星とのコード位相差を求め、コード位相差から信号伝播時間を算出する。
(もっと読む)
衛星測位システム
【課題】移動端末が自局の位置を高精度で測位できる衛星測位システムを安価に実現する。
【解決手段】複数個の準天頂衛星201、301a〜301dを用いた衛星測位システムにおいて、複数個の準天頂衛星が一体として衛星軌道に向けて打ち上げられ、複数個の準天頂衛星が一体として衛星軌道に沿って安定に飛行する段階において、比較的に高い仰角に位置する複数個の準天頂衛星の内の1個を基準局201とし、残りの準天頂衛星を中継局301a〜301dとして基準局の周辺の所定の軌道に分散させて、基準局から送信される第1の測位信号と各中継局から送信する第2の測位信号とを同期させることによって、移動端末が自局の位置を高精度で測位できるようにした。
(もっと読む)
航空機または船舶のリコーダーからのデータ遠隔収集方法及び装置
本発明は、沈没するときに放出させることが可能であり、かつフライトあるいは航海に関する情報だけでなく、漂流中のブイの位置をも記憶するメモリを二重に備えたブイ(3)を用いる、航空機または船舶のリコーダーからのデータ遠隔収集方法及び装置に関する。送受信両用無線通信手段により、ブイにメモリの内容を偵察航空機等の遠隔収集手段へ転送させることが可能である。 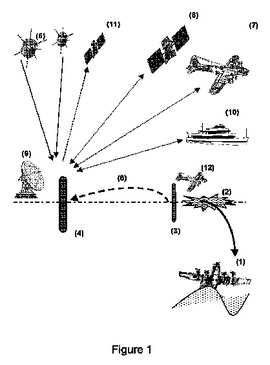 (もっと読む)
(もっと読む)
軌道決定装置及び軌道決定方法
【課題】 GPS受信機の突発的な出力異常時や、GPS受信機の不使用時にも影響を受けることなく、人工衛星のオンボードでの軌道決定処理を行うことで、軌道決定精度を維持することを目的とする。
【解決手段】 リファレンス軌道データから人工衛星の第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定し、推定された地心半径を元に、人工衛星の軌道決定を行う。
(もっと読む)
測位装置
【課題】到来時間差とドップラー周波数差を正しく計算し、干渉局を位置評定することができる測位装置を得る。
【解決手段】正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3とを備える。
(もっと読む)
通信リンクを利用した改良型GPS受信器
【課題】 受信した衛星暦情報からドップラー情報を導出すること、このドップラー情報から少なくとも1つの擬似距離を含む衛星の位置情報を計算する移動ユニットを提供すること、GPS局部発振器の周波数を較正する方法と移動ユニットを提供すること。
【解決手段】移動ユニットは、セル・サイトからセルラ通信リンクを介して移動ユニットの視野の中にある複数の衛星の衛星暦情報を受け取り、衛星暦情報からドップラー情報を導出する。GPS信号の取得に使用される局部発振器の出力が、精密搬送周波数信号から生成された基準信号によって修正されるよう、この精密搬送周波数信号を使用して局部発振器を較正する。
(もっと読む)
宇宙船の位置を推定するシステムおよび方法
宇宙船(6)の位置を推定するためのシステムが開示される。このシステムは、宇宙船(6)から送信された信号を受信するための受信局(4)および受信局(4)からのデータを受信するための処理局(2)を含む。各受信局(4)は、宇宙船(6)から送信される信号を記録ウィンドウ(8)の期間中に記録して、記録ウィンドウ(8)の期間中に記録された信号を表すデータを処理局(2)へ送信する。受信局(4)のそれぞれに関連した記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズである。処理局(2)は、宇宙船(6)と複数の受信局のそれぞれとの距離間の差を推定して宇宙船(6)の位置を推定するために、記録された信号の相関をとる。方法、受信局(4)、処理局(2)およびコンピュータプログラムも開示される。 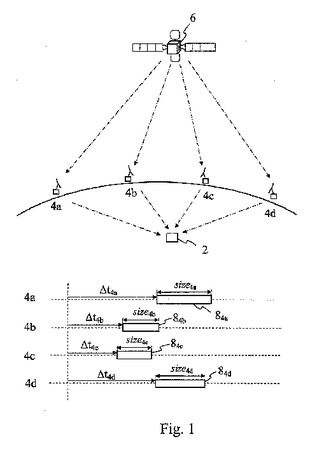 (もっと読む)
(もっと読む)
測位システム及び測位方法
【課題】測位目標が放射する電波を複数の移動体で受信しこれらの間で生成される到来時間差、到来周波数差を用いて目標の位置を特定する測位精度のよい測位システムを得る。
【解決手段】位置が未知な電波放射源1が放射する電波を受信して観測する受信手段を搭載した少なくとも2つの移動プラットフォーム3a,3bと、各移動プラットフォームからの観測情報の受信信号、移動ベクトル情報及び位置情報から受信信号の到来時間差及び到来周波数差を求め電波放射源の位置を標定する信号処理手段35と、各移動プラットフォームからの観測情報の移動ベクトル情報に基づき各移動プラットフォームにおける次の観測における最適移動方向及び最適移動速度を計算し各移動プラットフォームへそれぞれの計算結果を送り、各移動プラットフォームへ同期した移動観測を行わせる最適移動ベクトル計算手段36と、を備える。
(もっと読む)
宇宙機測位システム
【課題】 複数配置されたビーコン発信機からの信号を利用して、GPS信号を受信できない宇宙空間で、より精度の高い位置や速度の同定を行なうことのできる宇宙機測位システムを得ることを目的とする。
【解決手段】 着陸目標地点の周囲に4機配置され、軌道データと基準時刻を含めたビーコン信号を発信するビーコン発信機と、宇宙機に搭載され、ビーコン発信機の電波を受信する送信アンテナと、送信アンテナにより受信した少なくとも4機のビーコン発信機からのビーコン信号に基づいて、自身の位置座標および速度を計算する演算処理装置とを備える。
(もっと読む)
航行体の姿勢検出方法及び装置
【課題】2つのアンテナで航行体の姿勢を求める。
【解決手段】第1アンテナa1及び第2アンテナa2を離間して航行体1に搭載し、複数の測位用衛星S1,S2から発信された電波の各々について、第1アンテナa1及び第2アンテナa2に届く電波の位相差を算出し、各位相差から、複数の測位用衛星S1,S2と、第1アンテナa1と第2アンテナa2を結ぶ線分とがなす角をそれぞれの姿勢角として算出し、求めた複数の姿勢角θ1,θ2を合成することにより航行体1の姿勢を求める。
(もっと読む)
軌道推定装置および軌道推定方法
【課題】軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得る。
【解決手段】複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部30と、収束演算部30で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部40とを備えた軌道推定装置において、収束演算部30は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する。
(もっと読む)
1 - 20 / 36
[ Back to top ]