
Fターム[5J062BB05]の内容
Fターム[5J062BB05]に分類される特許
201 - 220 / 1,013
測位端末及びサーバ
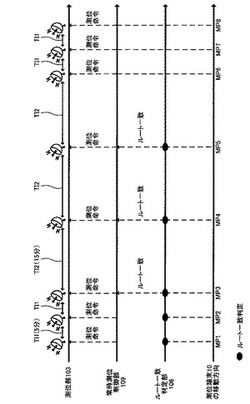
【課題】測位端末が定期的に測位処理を行い、測位処理によって取得された位置情報を情報提供サーバに送信する常時測位システムにおいて、測位端末の消費電力の増大を防止する。
【解決手段】本発明の測位端末は、測位端末の現在位置を示す位置情報を取得する測位処理を行う測位部103と、測位部103によって過去に取得された位置情報が示す位置ポイントを連接して構成される登録ルートを記憶するルート記憶部と、測位端末10が前記登録ルート上を移動するか否かを判定するルート一致判定部106と、前記測位端末が前記登録ルート上を移動すると判定された場合、測位部103が測位処理を行う測位間隔を、時間間隔TI1から時間間隔TI1よりも長い時間間隔TI2に変更する常時測位制御部109と、を具備する。
(もっと読む)
補助されたモードにおいて動作する擬似衛星を用いた位置決定システム
複数人配置確認支援システム

【課題】複数人の配置を正確に把握する。
【解決手段】フォーメーション確認支援システム1は、携帯端末2、基地局3及び管理サーバ4を備える。携帯端末2は、測定対象領域にいる各人に装着され、当該携帯端末2に固有の端末IDを含む電波を発信する発信部を有する端末である。基地局3は、測定対象領域の周囲に設置され、1以上の基地局3が携帯端末2と通信可能な範囲が測定対象領域全体をカバーするように基地局3の台数及び設置位置が調整される。そして、携帯端末2から電波を受信し、その受信した電波に基づいて当該携帯端末2の方向及び距離を求め、求めた携帯端末2の方向及び距離と、基地局3自体の位置とから携帯端末2の位置を算出し、算出した携帯端末2の位置、端末ID及びその時の時刻を含む位置情報をサーバ4に送信する。管理サーバ4は、基地局3から各携帯端末2の位置情報を随時受信し、記憶するとともに、各携帯端末2の配置を表示する。
(もっと読む)
受信装置および周波数偏差計測ユニットおよび測位測距システム
【課題】信号の到達時間差を計測して測位を行うシステムにおいて、高精度な時間差計測を、低消費電力、小型かつ低コストの装置で行う。
【解決手段】本発明は、測位信号を送信する(被測位)ノードと、基準信号を送信する基準局と、上記測位信号および上記基準信号を受信する複数の基地局と、上記複数の基地局とネットワークでつながったサーバと、を有するシステムにおいて、上記複数の基地局が、クロック信号と、該クロック信号をシフトさせる信号とを用いて、上記測位信号と上記基準信号とを受信した時間差および上記基準局との周波数偏差を計測し、上記計測時間差および上記周波数偏差をもとに、上記サーバが上記ノードの位置を算出することを特徴とする。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】ソーラーセルを利用して屋内外を精度良く判断でき、受信処理を効率よく行うことができる衛星信号受信装置を提供すること。
【解決手段】ソーラーセル22と、二次電池24と、ソーラーセル22から二次電池24への充電経路を断続する充電制御スイッチ43と、充電制御スイッチ43が接続された状態で充電状態を検出する充電状態検出回路50と、充電制御スイッチ43が切断された状態で発電状態を検出する発電状態検出回路60と、制御回路40とを備える。制御回路40は、充電状態検出回路50を間欠的に作動し、ソーラーセル22から二次電池24に充電していることを検出した場合、発電状態検出回路60を間欠的に作動し、発電状態検出回路60で検出された検出値が予め設定された閾値以上の場合のみ、GPS受信回路30を作動する。
(もっと読む)
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
ユーザプロファイリングのためのポジションデータの高速クラスタ化
ポジションクラスタ化の方法は、クラスタのセット中の各クラスタの長方形の境界線と、各クラスタ内の重心と、各クラスタ内のポイントの数とを記憶させることにより、クラスタのセットを維持することを含む。方法は、クラスタが、クラスタの長方形の境界線と、クラスタ内の重心と、クラスタ内のポイントの数とを調節することにより、ポイントに境界をつけるときに、クラスタのセット中のクラスタにポイントを追加することをさらに含む。 (もっと読む)
位置算出装置、方法及びプログラム
【課題】局所座標系ごとに算出された位置座標を精度よく1つの座標系に統合する。
【解決手段】複数の局所座標系を検出し、端末と複数の送信機それぞれとの間の距離に基づいて、局所座標系それぞれにおいて、複数の送信機の位置座標を算出する手段1920と、複数の局所座標系のうち、閾値以上の数の送信機を共有する2つ以上の局所座標系を、互いに統合可能な座標系として抽出する手段1931と、抽出された2つ以上の局所座標系それぞれにおいて、送信機間距離及び送信機間距離の信頼度を算出し、2つ以上の局所座標系それぞれにおいて算出された送信機間距離の信頼度によって重み付けを行なって重み付け補正後の送信機間距離を算出し、信頼度がある値よりも高い送信機の補正後の送信機間距離のみを用いて、2つ以上の局所座標系を統合した座標系における各送信機の位置座標を信頼度が高い順に算出する手段1932と、を具備する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】測位要求に応じて位置データを求める際に、測位衛星を利用した位置の測定が適切に遂行できなかった場合でも、位置データの欠落が生じることのない測位装置、測位方法およびプログラムを提供する。
【解決手段】測位要求がなされた際に、測位衛星を利用した位置の測定を実行させ、この位置の測定が遂行された場合に、この測位結果データを前記測位要求に応じた位置データとして取得する(S43,S44)一方、測位衛星を利用した位置の測定が遂行されなかった場合には、移動方向と移動量とを計測に基づく位置の測定結果データを測位要求に応じた位置データとして取得する(S42,S48)構成とする。
(もっと読む)
無線位置検出システムと無線位置検出方法
【課題】現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
(もっと読む)
屋内の検出に基づいて無線端末の位置を推定するための検索エリア削減
【課題】 無線端末向けの位置固有の支援データを生成する目的で、非GPS導出の技術を使用して、Assisted GPS機能を備える無線端末の位置を推定する方法を提供すること。
【解決手段】 無線端末は、支援データを使用して、1つ又は複数のGPS信号を取得及び処理し、無線端末の位置の証明となる情報を導出する。GPSで導出された位置情報は、次いで、非GPS導出の位置と組み合わせられて、GPS又は非GPSどちらかのみで導出するよりも良好な無線端末の位置の推定を形成する。このGPS導出技術と非GPS技術の組み合わせは、無線端末が1つ又は2つのGPS信号しか取得することができない場合に特に有用である。その理由は、2つのみのGPS信号だけで無線端末の位置を求めることは可能でないためである。
(もっと読む)
携帯端末および位置測位方法
【課題】端末の測位負荷を軽減することができる携帯端末および位置測位方法を提供する。
【解決手段】GPS測位部101が所定周期若しくはユーザ指示に従って、位置測位を行っている。そして、その測位を行うにあたって、制御部105は携帯端末100の移動状態を判断する。制御部105は、携帯端末100は静止状態であって、状態情報管理テーブル106bに記憶されている状態情報を参照して、携帯端末100は直近に測位した位置から移動していないことを判断すると、位置情報記憶テーブル106aに記憶されている直近に測位された位置を、携帯端末100の現在位置として、位置情報記憶テーブル106aに記憶させることができる。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法を提供する。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング
本明細書で開示する例は、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとに関し得る。 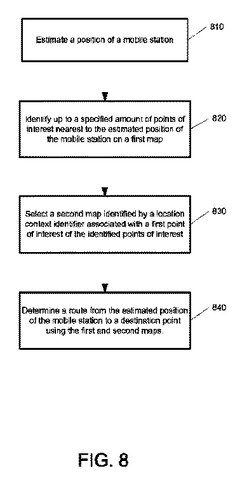 (もっと読む)
(もっと読む)
関数の局所極大又は極小のパラメータを推定するための手順
【課題】関数の局所極大又は極小のパラメータを推定するための手順。
【解決手段】受信された信号から導出された相関関数の局所極大又は極小のパラメータを推定するための方法及びシステム。内挿された局所極大又は極小が、決定される。内挿オフセットは、その後、導出され、内挿された関数の局所極大又は極小の位置とサンプリングされた関数の局所極大又は極小の位置との間の差を備える。パラメータの推定値は、内挿オフセットから導出される。
(もっと読む)
表示装置、情報処理装置、及び表示システム
【課題】簡易な処理により、無線端末に対して通信を許可する。
【解決手段】表示装置は、表示画面に画像を表示する表示手段と、通信を行う通信手段と、無線端末の位置を検出する位置検出手段と、前記位置検出手段により検出された前記無線端末の位置に従って、前記無線端末が前記表示画面に接触したか否かを判別する判別手段と、前記無線端末が前記表示画面に接触したと前記判別手段により判別された場合、前記通信手段による前記無線端末との間の通信を許可する制御手段とを備えている。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】ユーザの現在位置の測位を行う測位装置において、ユーザの移動状態から有り得ない誤った測位結果が使用されることを防止する。
【解決手段】撮像装置1AのCPU10は、GPSユニット31における前回の測位結果と今回の測位結果に基づいて、ユーザの前回の測位位置からの移動距離Lを算出し、3軸加速度センサ16により検出されたユーザの移動状態に基づいて前回の測位位置からユーザが移動し得る距離の許容範囲を設定し、算出された移動距離Lが設定された許容範囲内である場合にGPSユニット31による測位結果を使用し、算出された移動距離Lが設定された許容範囲内ではない場合にGPSユニット31による測位結果を使用しないように制御する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
電磁信号源の位置特定
第1の複数のロケーションにおいてスキャニングを行うことにより、信号源位置データを生成するステップであって、信号源位置データは、前記信号源の少なくとも1つの位置の推定を表すステップと、信号検出システムを用いて第2の複数のロケーションにおいてスキャニングを行うことにより、信号検出データを生成するステップであって、信号検出データは、第2の複数のロケーションにおいて信号源から受信した信号に関連するステップと、信号検出データに基づいて信号源位置データを処理することによって、信号源位置データにおける推定誤差を修正するステップと、処理された信号源位置データを出力するステップとを含む、複数の電磁信号源のロケーションを推定する方法が提供される。 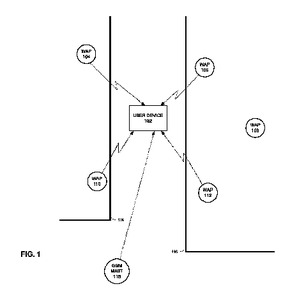 (もっと読む)
(もっと読む)
201 - 220 / 1,013
[ Back to top ]