
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
201 - 220 / 2,510
情報処理装置及びその制御方法、並びに、プログラム
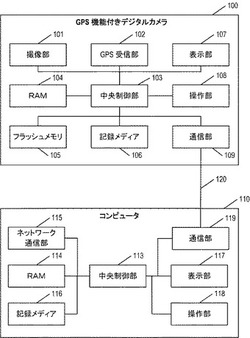
【課題】ローカルタイムとUTCとが混在する場合であっても、画像データとログ情報の関連性を把握可能にする。
【解決手段】
情報処理装置の処理手段は、画像データが撮影された日時の情報に、協定世界時(UTC)による第1の日時情報が含まれる場合には、第1の日時情報と、測位日時の情報とを比較して対応するGPSログファイルを特定し、画像データが撮影された日時の情報に、第1の日時情報が含まれず、ローカルタイムで記述された撮影日時の情報が含まれる場合には、撮影日時の情報を時差情報に基づいて協定世界時による第2の日時情報に換算し、第2の日時情報と測位日時の情報とを比較して対応するGPSログファイルを特定する。
(もっと読む)
無線位置決定精度を改善するための方法及び装置

【課題】利用可能な測定値を使用して端末に対するより正確な所在地推定値を行う、無線位置決定精度を改善するための方法及び装置を提供する。
【解決手段】端末110に対する初期の所在地推定値が、(例えば、セルID解又は拡張セルID解に基づいて)初めに取得される。測定値は、端末に対して取得される。初期の所在地推定値は、それから、測定値を用いて更新されて、端末に対する修正された所在地推定値を取得する。更新することは、下記によって実行されることができる、(1)初期の所在地推定値及び測定値に基づいて測定値ベクトルを決定すること、(2)測定値に対する観測行列を作成すること、(3)加重の行列を決定すること、(4)測定値ベクトル、観測行列、及び加重行列に基づいて補正ベクトルを導き出すこと、及び(5)補正ベクトルを用いて初期の所在地推定値を更新すること。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】車両速度及びヨーレートの算出精度を向上させることができる、車両用推定航法装置を提供する。
【解決手段】GPS情報から車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、タイヤの回転情報を検出するタイヤ回転情報検出手段と、タイヤの回転情報から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを逐次算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを逐次算出する第2パラメータ算出手段とを備える。
(もっと読む)
衛星測位システム(SPS)信号の測定処理用の方法および装置
【課題】多様な種類の入手可能なデータを活用し、最適場所解を得る。
【解決手段】対応する複数のSPS衛星からのSPS信号が、SPS受信機で受信される。SPS受信機の場所に対応する信号環境が特徴付けられ、信号環境データが生成される。例えば、GPS受信機の近似場所を考慮して、セルラーネットワークベースのデータベース等の情報源が探索され、信号環境データを検索する。この近似場所は、GPS受信機と同じ場所に配置されるセルラー通信装置とセルラー無線通信しているセルサイトの場所によって指定されてよい。衛星信号の信号特徴に関連するパラメータが定義され、パラメータの閾値は信号環境データを用いて求められる。複数の衛星からの衛星信号の到着時刻に対応するコードフェーズが測定される。測定されたデータが、GPS受信機の位置が計算される到着時刻の集合を生成するためにパラメータの閾値を使用して調べられる。
(もっと読む)
衛星位置決めシステム信号を得る方法および装置
【課題】SPS信号をSPS衛星から得る時間を減少させる、衛星位置決めシステム信号を得る方法および装置を提供する。
【解決手段】第1のSPS衛星に対する第1の擬似距離が決定され、SPS受信機の近似位置が決定される。第2のSPS衛星に対する第2のSPS擬似距離に対する推定擬似距離が第2のSPS衛星の近似位置および衛星位置から決定される。SPS受信機は、推定擬似距離によって決定された距離の第2のSPS衛星からのSPS信号を探索する。推定擬似距離は、前記第2のSPS衛星に対する予め決定された擬似距離に基づかない。近似位置は、いろいろな無線セルサイトの各々の識別をセルラ(あるいはセルベース)電話システムのような無線セルベース通信システム内のオブジェクトに対する近似位置と相関するセルベース情報源から決定される。
(もっと読む)
所在区域判定装置、所在区域判定方法、及び所在区域判定プログラム
【課題】位置情報に基づく移動体の所在区域の判定について該位置情報の測定誤差による影響を低減させること。
【解決手段】所在区域判定装置は、記憶部が記憶する、移動体の位置情報及び時刻情報の履歴に基づいて、前記移動体が所定区域の出入り口の所定範囲を出てから該所定区域の出入り口の所定範囲に入るまでの第一の期間を特定する特定部と、前記第一の期間における前記位置情報が、前記所定区域内又は前記所定区域の外側の所定範囲内に含まれている場合に、該第一の期間における前記移動体の所在位置は当該所定区域内であると判定する判定部とを有する。
(もっと読む)
GPSモジュール、通信端末装置及び通信システム
【課題】通信端末装置の構成を単純化して、製造工程を簡易化できるGPSモジュールを提供することを目的とする。また、該GPSモジュールを備えて、通信端末装置に固有の識別符号と該通信端末装置が現に所在する地理的位置を基地局(ホスト装置)に送信する通信端末装置を提供する。
【解決手段】GPS衛星から受信した信号に基づいて、自身が現に所在する地理的位置を算出する測位演算部16を有するGPSモジュール9において、当該GPSモジュール9に固有の識別符号を記憶するID記憶部18を備える。
(もっと読む)
マルチパス検出方法、マルチパス検出プログラム、マルチパス検出装置、およびGNSS受信装置
【課題】直接波信号とマルチパス波信号とのコード位相差が小さくても確実にマルチパスを検出する。
【解決手段】マルチパス検出部54のPe相関部31には、Promptレプリカ信号に対して、1chip遅延の第1レプリカ信号と(1+x)chip遅延の第2レプリカ信号が与えられる。Pe相関部31は、ベースバンド信号と第1レプリカ信号および第2レプリカ信号との相関処理を行い、ベースバンド信号と第1レプリカ信号との相関結果から、ベースバンド信号と第2レプリカ信号との相関結果を差分演算する。この差分演算結果は、直接波信号のみであれば理論的に零となり、マルチパス波信号が含まれると零でない所定値となる。したがって、マルチパス判定部32は、零でない閾値Thを設定し、差分演算結果と閾値Thを比較することでマルチパスの有無の判定を行う。
(もっと読む)
衛星測位装置
【課題】通信網に接続不可能な状態にある通信装置を持つ衛星測位装置でも、高速な測位開始を可能にする。
【解決手段】N個の衛星測位装置からなる衛星測位システムにおいて、任意の衛星測位装置が取得した測位用データを他のN-1個の衛星測位装置に伝送する手段を有し、各衛星測位装置がN個の測位用データを用いて測位を行う。
(もっと読む)
通過位置表示システム、その端末装置、プログラム
【課題】ユーザがレース状況をほぼリアルタイムで容易に把握できるようにする。
【解決手段】
GPSサーバ20は、各移動体の識別情報と実測位置情報を含む位置情報24を、随時、各在席端末10へ送信する。各在席端末10は、表示画面作成部14等が、実測位置情報をモニタ19の画面上の座標に変換して、この座標に各移動体を示す画像を表示する。また、その在席端末10のユーザによって投票された移動体の画像は、他の移動体の画像とは表示形態を変えて表示する。
(もっと読む)
撮像装置
【課題】 一般に、GPSアンテナの感度分布は撮像装置の姿勢が横位置撮影の時に天頂方向の感度が最大になるように作られているので、縦位置撮影の場合には天頂方向の感度が低下してしまい、測位誤差が大きくなってしまう。
【解決手段】 CPU16は、時刻t1において姿勢センサ20の出力が横位置から縦位置へ変化したことを検知したら、一定の保持時間Tの期間、位置情報の更新を行わない。すなわち、時刻t1からt2において、CPU16は横位置でGPS受信機17から出力された最後の位置情報を保持する。
(もっと読む)
各基地局(celltower)で移動受信のためのマップを作成する方法および装置
【課題】移動受信のためのビデオマップを作成する。
【解決手段】移動受信のためのビデオマップを作成する方法および装置であって、基地局にもっとも近い関心のポイントを有する領域のビデオマップを作成すること、および、専用のチャンネルを介してビデオマップを繰り返し送ることを含む方法および装置を記載する。また、移動受信のためのビデオマップを受信する方法およびシステムであって、専用のチャンネルに合わせること、および専用のチャンネルを介してビデオマップを受信することを含む方法およびシステムを記載する。最後に、関心のポイントに関する位置を決定する方法および装置であって、専用のチャンネルを介してビデオマップを受信すること、Moving JPEG画像をビデオマップに重ねること、および車両移動をビデオマップに追跡記録することを含む方法および装置を記載する。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
測位支援装置
【課題】本発明は、測位支援装置に関し、測位の精度を高めることを目的とする。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
(もっと読む)
電子機器
【課題】必要以上のバッテリ消費を抑制しつつ、ホスト装置の次回起動時における測位高速化(ホットスタート)を実現する。
【解決手段】バッテリ駆動のホスト装置の電源がオフとされている期間中にGPS受信部による測位を裏測位として定期的に実行することによりホスト装置の次回起動時における測位高速化(ホットスタート)を実現する電子機器において、裏測位の実行に制限を加える。例えば、ホスト装置の電源オフ時点と測位が前回成功した時点との時間差(LDIF)が所定の基準時間(L1)以上であるときや、基準時間(L1)以上に亘って裏測位が連続失敗したとき、次回測位は必ずコールドスタートになるため、新たな裏測位の実行を禁止する。
(もっと読む)
到来時点識別装置
【課題】本発明は、入力された時間信号に所定の処理を施す電子装置において、その時間信号の振幅が極大となる時点を識別する到来時点識別装置に関し、SN比の著しい低下を伴い、あるいはレベルが過度に低い時間信号であっても、振幅が極大となる時点を精度よく安定に識別できることを目的とする。
【解決手段】既知の数の周波数で共振する共振回路のモデルに、時間軸上における前記既知の数の時点で振幅が極大となる時間信号の周波数スペクトルをあてはめることにより、前記共振回路の伝達関数の係数を得るスペクトル推定手段と、前記係数に含まれる前記既知の数の周波数を前記既知の数の時点に換算する換算手段とを備える。
(もっと読む)
無線端末装置及び位置測位方法
【課題】ネットワーク環境に応じて測位方式を適切に選択できる無線端末装置及び位置測位方法を提供すること。
【解決手段】携帯電話機1は、複数の測位方式のいずれかを選択して位置測位を行う測位部34を備え、測位部34は、位置測位を要求された際に、所定の測位サーバと通信可能なCDMAで位置登録されている場合、要求された測位方式により位置測位を行い、所定の測位サーバと通信不可能なLTEで位置登録されている場合、測位サーバを利用しないStandalone方式により位置測位を行う。
(もっと読む)
測位部の起動を制御する測位起動制御方法、移動端末及びプログラム
【課題】様々な移動状態にあっても、できる限り測位部の起動回数を低減させることによって、バッテリの消費電力を低減させる測位起動制御方法等を提供する。
【解決手段】フラグを「起動状態」に設定した後、加速度センサの加速度データに基づいて、「停止」「電動車搭乗」「その他」のいずれかの移動状態であるかを推定する移動状態推定処理を実行し、現在位置を測位するべく測位部を起動し、移動状態が「停止」「電動車搭乗」である場合、フラグを「休止状態」に設定する。フラグが「休止状態」である場合、以前の移動状態が「停止」であって、広域通信インタフェース部による基地局識別子に変更がある場合、フラグを「起動状態」に設定し、又は、以前の移動状態が「電動車搭乗」であって、広域通信インタフェース部による基地局識別子に変更がない場合、フラグを「起動状態」に設定する。これら処理を繰り返すように実行する。
(もっと読む)
ターゲット識別装置およびターゲット移動予測方法
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
(もっと読む)
ナビゲーション装置
【課題】GPS受信機に間欠的に電力を供給して定期的に測位をしなくても、ナビゲーション装置を起動した際にすぐに現在位置を表示すると共に経路探索を行うことができるナビゲーション装置を提供する。
【解決手段】本発明のナビゲーション装置は、任意の目的地を設定し目的まで経路案内することができるナビゲーション装置であって、現在位置を検出する現在位置検出手段と、ナビゲーション装置が起動された起動履歴を記憶する記憶手段と、記憶手段に保存された起動履歴から次にナビゲーション装置が起動する条件を予測する起動予測手段と、前記起動予測手段で予測された結果に基づいて前記現在位置検出手段の動作を制御する動作制御手段と、を備えたことを特徴とする。
(もっと読む)
201 - 220 / 2,510
[ Back to top ]