
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
101 - 120 / 2,510
軌道予測装置、及び軌道予測方法
【課題】予測誤差を削減することを可能にする軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、受信データに基づいて測位衛星の位置と速度である位置速度情報を算出する衛星位置速度算出部と、衛星位置速度算出部が算出した前記位置速度情報が時刻毎に記憶されている記憶部と、記憶部に記憶されている位置速度情報に基づき測位衛星に位置を推定する軌道予測部と、を備え、衛星位置速度算出部は、記憶部に予め定められている個数以上の位置速度情報が記憶されている場合、時刻が近接する2個の位置速度情報同士を比較して位置速度情報の記憶を開始してからの経過時間が大きい方の位置速度情報を削除した後、算出した位置速度情報を記憶部に記憶させる。
(もっと読む)
携帯端末システム、携帯端末、プログラム、記録媒体および携帯端末システムの制御方法。

【課題】現在位置情報の共有状態を安定して長時間継続することができる。
【解決手段】代表端末2は、現在位置情報を取得する位置情報取得手段41と、現在位置情報を各従属端末3に送信するデータ送信手段42と、各従属端末3から、各従属端末3のバッテリー情報を受信するデータ受信手段43と、自身のバッテリー情報と受信したバッテリー情報とに基づいて、次の代表端末2を選定する代表端末選定手段52と、選定結果を送信するデータ送信手段42と、次の代表端末に自身が選定されていない場合、従属端末3に設定変更を行うリスト更新手段53とを備え、各従属端末3は、バッテリー情報を送信するデータ送信手段62と、次の代表端末2に自身が選定された場合、代表端末2に設定変更を行うリスト更新手段64と、を備えた。
(もっと読む)
自動車に搭載されているGNSS受信機の位置を決定する方法及びシステム
【課題】自動車に搭載されているGNSS受信機の本来機能が妨害源によって意図的に無力化されているときでもGNSS受信機の位置を決定できるようにする。
【解決手段】自動車10が道路交通路上定点を通過するときに、当該道路交通路上定点20のセンサ装置21によって、妨害源12が送出している妨害信号、及び/または、妨害源により毀損されたGNSS受信機の受信信号の検出が行われる。更に、検出された信号に対して信号処理が施されることで、自動車の車上に妨害源が存在しているか否かの判定が行われる。妨害源が存在していたならば、少なくとも当該道路交通路上定点の所在位置と、当該自動車の車上に存在している妨害源とを示すデータが生成され、道路交通路上定点の所在位置に基づいて自動車の位置を決定する。
(もっと読む)
軌道予測装置、及び軌道予測方法
【課題】演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備える。
(もっと読む)
人位置検索システム
【課題】命の危険が迫っている人の位置を特定することができる人位置検索システムを提供する。
【解決手段】本発明の人位置検索システム10は、複数の基地局30で測定した電波の送信から受信までの所要時間より、ユーザが身に付けているセンサ端末20の位置を特定し、特定した位置に、センサ端末20から送信されたユーザの生体情報を対応付けて管理する。
(もっと読む)
GNSS信号の捕捉のためのシステム及び/又は方法
【課題】衛星航法システム中の宇宙ビーグル(SV)から受信される信号を捕捉するためのシステム及び方法に関し、他のGNSSシステムに属する衛星に関して探索範囲を低減する。
【解決手段】基準位置で第1の宇宙ビークル(SV)から受信された第1の周期的反復擬似ランダム符号化信号中に第1の符号位相を検出することと、第1の受信信号の検出した符号位相、基準位置から第1のSVへの推定方位角、及び基準位置から第2のSVへの推定方位角に少なくとも部分的に基づいて、基準位置で第2のSVから受信された第2の周期的反復擬似ランダム符号化信号中に第2の符号位相の検出のための符号位相探索範囲を決定する。
(もっと読む)
予測を伴うハイブリッド衛星測位
【課題】衛星測位を使用して2つのポジションフィックスを計算する。
【解決手段】RFフロントエンドを使用して、衛星測位信号を受信するステップと、アナログ・デジタル変換器を使用して、受信信号をサンプリングして信号サンプルを発生させるステップと、第1のポジションフィックスを計算するために、プロセッサを使用して、サンプルの第1の組が発生されるときにサンプルの第1の組を処理するステップと、計算と関連付けられる情報をメモリに記憶するステップと、第2のポジションフィックスを計算するためのその後の処理のために、サンプルの第2の組、または、サンプルの第2の組から得られる距離測定値をメモリに記憶するステップと、その後、第2のポジションフィックスを計算するためにサンプルの第2の組を処理し、第2のポジションフィックスの計算が第1のポジションフィックスの計算と関連付けられる情報によって支援されるステップとを備える。
(もっと読む)
情報機器
【課題】位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供すること。
【解決手段】入力部12を介して情報機器10に入力された位置情報は、第1情報として記憶部14に記憶される。位置情報の出力要求がなされた場合に、情報生成部16は、第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する。出力部18は、第1情報を出力する代わりに、第2情報を出力要求元に出力する。
(もっと読む)
支援計算を伴う衛星測位
【課題】衛星信号サンプルからポジションフィックスを計算する。
【解決手段】サンプルの第1の組から第1のポジションフィックスを計算する。第1のポジションフィックスの計算中に生成される第1の基準情報をメモリに記憶する。サンプルの第2の組から第2のポジションフィックスを計算する。第2のポジションフィックスの計算中に生成される第2の基準情報をメモリに記憶する。第3の時間に受信器により発生される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信し、第3のポジションフィックスを計算するためにサンプルの組または距離測定値を処理する。処理は、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法
【課題】地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法を提供する。
【解決手段】拡張された干渉法装置を形成する、受信アンテナ(ANT1、ANT2、ANT3)を装備する人工衛星(SAT1、SAT2、SAT3)と、各衛星用の少なくとも1つの専用センサー(CAPTd_1、CAPTd_2、CAPTd_3)、及び衛星間通信手段(COMM1、COMM2、COMM3)を含む、衛星間相対計測装置と、衛星間相対計測装置により配信される、衛星の互いの相対位置の決定から来る、受信信号の日付決定用装置(DAT1、DAT2、DAT3)と、衛星のアンテナの、少なくとも1組を含む第二の干渉法装置と、地上基地局(SBS)と、衛星上で取得した測定値を地上基地局に送信するための装置と、衛星のうちの少なくとも1つの絶対位置を決定する手段(DPA)とを含むシステム。
(もっと読む)
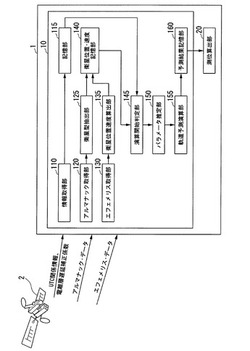
測位装置および測位方法
【課題】複数の測位方式の中から、要求される測定精度を満たし、かつ消費電力の小さい測位方式を、測位環境に応じて適応的に選択すること。
【解決手段】測位装置は、複数の測位手段と、複数の測位手段に測位を実行させる測位制御部と、複数の測位手段による測位が実行される際に消費される電力を測定する消費電力測定部と、複数の測位手段により測位が実行される際に取得されるべき測位精度と、消費電力に基づいて、測位に使用すべき測位手段を設定する測位手段設定部とを有する。
(もっと読む)
位置情報発信機及び測位システム
【課題】屋外、屋内の双方で現在位置を取得する測位システムにおいて、屋内に設置された位置情報発信機に係るヌル点や信号の干渉の問題を克服して、測位誤差が大きくならないようにするとともに、測位時間の増大を防ぐ。
【解決手段】位置情報発信機2は、緯度、経度、高さ情報を含む位置情報信号を生成する手段と、互いに離間した複数のアンテナ28と、前記アンテナ28毎にそれぞれ異なるチャンネルを用いて前記位置情報信号を送信する手段と、を備える。
(もっと読む)
電子機器
【課題】位置情報の算出に要する時間をより効果的に短縮可能な電子機器を提供すること。
【解決手段】衛星運行情報生成部122は、航法衛星から受信した電波信号に基づいて衛星運行情報を生成して記憶部130に記憶する。通信部70は、航法衛星からの電波信号を受信する機能を有し、直接無線通信が可能な距離にある他の電子機器との間で直接無線通信を行う。衛星運行情報受信部22は、通信部70を介して当該他の電子機器から衛星運行情報を受信する。衛星運行情報更新部24は、衛星運行情報受信部22が受信した衛星運行情報と記憶部130に記憶された衛星運行情報とを照合し、照合結果に応じて、衛星運行情報受信部22が受信した衛星運行情報を用いて記憶部130に記憶された衛星運行情報を更新する。位置情報算出部124は、記憶部130に記憶された衛星運行情報に基づいて自己の位置情報を算出する。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
測位装置及び測位方法
【課題】複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすること。
【解決手段】測位装置は、現在地の測位結果を出力する複数の測位部と、複数の測位部各々について有意の測位結果が得られる確率とその測位結果に対する誤差の情報とを記憶する記憶部と、記憶部に記憶されている確率及び誤差の情報を用いて、複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、その確率及び予想される消費電力に基づいて、複数の測位部のうちの1つ以上を使用する順序を決定する制御部とを有し、複数の測位部のうちの1つ以上が順序にしたがって測位結果を出力する。
(もっと読む)
測位方法及び測位システム
【課題】通信機能を持たない端末での測位時間の短縮を可能とする測位方法及び測位システムを提供する。
【解決手段】測位システムは、測位支援情報4及び測位支援情報4を表示する表示部30を有する第1の装置2と、第1の装置2の表示部30に表示された測位支援情報4を撮影する撮像部、測位衛星からの測位信号を受信する受信部、及び撮像部で撮影された測位支援情報4と受信した測位信号とに基いて測位を行う測位部、を有する第2の装置3と、を含む。
(もっと読む)
同期時間バイアスを使用する測位システムにおける位置計算
【課題】衛星ナビゲーションシステムと無線通信システムとから受信した信号に基づいて移動体の位置決めの解を計算する技術に関する。
【解決手段】衛星ナビゲーションシステム5のシステム時間と無線通信システム8のシステム時間とを相互に制約する同期バイアスを見越して、解く。移動体4は、環境における位置の解を計算するのに、定められた制約を使用するか、さもなければ、追加の独立の測定値を必要とする。移動体は、受信機自立保全監視(Receiver Autonomous Integrity Monitoring, RAIM)機能を取入れて、各受信信号から求めた位置および時間の解を確認してもよい。ここに記載されている技術にしたがって、移動体は、定められた同期バイアスを利用して、環境にRAIMまたは同様の技術、さもなければ、不定の技術を適用する。
(もっと読む)
GPS測定システムおよびGPS測位方法
【課題】測位サーバが測位端末の位置を精度よく算出することができる、GPS測位システムおよびGPS測定方法を提供する。
【解決手段】無線基地局装置30は、フレーム番号を付与した同報フレームを測位端末装置10および測位サーバ装置20に送信し、測位端末装置は、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関する位相制御量を該台数分取得し、該位相制御量とフレーム番号とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置は、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号と第2のGPS受信機から取得した航法メッセージ情報とから、先頭C/Aコードを特定し、送信時刻と該時刻における衛星位置とを求め、測位演算を行う。
(もっと読む)
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
(もっと読む)
101 - 120 / 2,510
[ Back to top ]