
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
161 - 180 / 2,510
時刻修正機能付きGPS時計
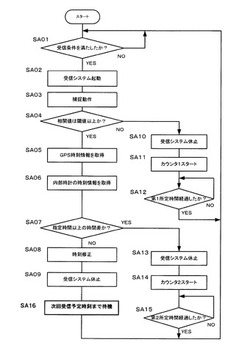
【課題】消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供すること。
【解決手段】GPS信号の受信環境が悪く、受信レベルが所定の閾値以上ない場合には、1時間ごと(第1所定時間)に受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごと(第2所定時間)に受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。
このようにすることで、受信環境が悪化しているときには、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、GPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となる。
(もっと読む)
位置情報提供装置および位置情報提供方法

【課題】 大掛かりな設備や、携帯端末等の装置の設計変更を必要とせずに、場所によらずに携帯端末等の装置が正確な位置情報を取得できるようにする。
【解決手段】 位置情報提供装置1は、複数の信号受信部2と、位置確定部3と、無線通信部4とを有する。各信号受信部2は、それぞれ、位置情報を含む互いに異なる種類の信号を受信する機能を備えている。位置確定部3は、信号受信部2で受信された各信号に含まれている位置情報と、それら各信号に対して与えられる信頼度とに基づいた演算処理により、自装置の所在位置を確定する機能を備えている。無線通信部4は、位置確定部3により確定した前記所在位置の情報を伝達する信号を、予め定められた信号形式でもって外部に向け無線送信する機能を備えている。
(もっと読む)
受信されるSPS信号における曖昧さを減らすためのシステムおよび/または方法
【課題】衛星ナビゲーションシステムにおけるSV(宇宙船)から受信される信号に関連する曖昧さを解決するためのシステムおよび方法を提供する。
【解決手段】基準位置において第1の宇宙船(SV)から獲得される第1の信号から導き出される第1の擬似距離仮説を、基準位置から第1のSVまでの第1の距離と、基準位置から第2のSVまでの第2の距離との推定される差に少なくとも部分的に基づいて、基準位置において第2のSVから受信される第2の信号から導き出される1つまたは複数の第2の擬似距離仮説に関連付け、関連付けられた第1の擬似距離仮説に少なくとも部分的に基づいて、第1の信号を変調するデータ信号のビットエッジの位相の曖昧さを減らす。
(もっと読む)
電子時計およびその制御方法
【課題】ローカル時間を自動的に表示することができるとともに消費電力を低減でき、小型化も容易な電子時計およびその制御方法を提供する。
【解決手段】GPS付き腕時計100は、GPS受信回路30と、外部操作部70と、受信制御部42と、外部操作部70の入力操作に基づいて、自動受信の有効/無効を切り替える自動受信設定部43と、受信モードを測時モードおよび測位モードのいずれかに設定可能な受信モード設定部44と、時刻情報修正部45とを備える。受信モード設定部44は、外部操作部70の入力操作により自動受信が無効にされた後に、再度有効にされた場合には、測位モードに設定し、測位モードに設定された状態で自動受信がされた後に、一定の条件に該当した場合は、測時モードに設定する。受信制御部42は、自動受信条件に該当した場合、受信モード設定部44で設定された受信モードでGPS受信回路30を作動して自動受信処理を実行する。
(もっと読む)
方位測定装置
【課題】高緯度における方位誤差を従来よりも低減する。
【解決手段】慣性センサの検出量に基づいて航走体の第1の方位角を測定するマスタコンパスと、一定間隔を隔てて配置された2つに受信アンテナを備え、各受信アンテナで間欠的に受信した測位用電波に基づいて各受信アンテナの位置を演算し、当該各受信アンテナの位置に基づいて航走体の基準方位角を測定する基準方位角測定手段と、該基準方位角測定手段から間欠的に入力される基準方位角に基づいて当該基準方位角よりも細かい間隔のバックアップ方位角を出力するバックアップ方位角演算部と、緯度が所定の基準緯度を超えない状態では第1の方位角を外部に出力し、緯度が所定の基準緯度を超えた状態ではバックアップ方位角を外部に出力する出力方位角切替部とを具備する。
(もっと読む)
位置特定サーバに情報更新を供給するためのシステムおよび/または方法
【課題】移動局の位置がネットワーク位置特定サーバにおいて特定される方法およびシステムに関し、データリンク要件を低減する。
【解決手段】2つの方法で、データリンク要件を低減する。すなわち、方法1、(i)生の測定値を獲得し132、(ii)生の測定値と以前の生の測定値および/または推定の組み合わせに基づいて推定を更新し134、(iii)更新された推定を位置特定サーバに送信する136。方法2、(i)様々な時間インスタンスに複数の信号から生の測定値を獲得し、(ii)生の測定値に基づいて推定を更新し、(iii)或る共通の時間インスタンスに推定を補外し、(iiii)補外された推定を位置特定サーバに送信する。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100の絶対位置を検出した結果と、リンク情報生成部22が移動端末の直進距離を示す線分(リンク)を生成した結果と、に基づいて、移動経路算出部24が移動経路を算出する。この場合に、移動経路算出部は、移動経路を算出する際に、リンク情報生成部22が取得したリンクの長さを補正するための補正パラメータr1、r2、r3、…、と、リンクの方向(角度t1、t2、t3、…)とを絶対位置検出部30が検出した絶対位置と、絶対位置を検出したときに移動端末が移動していたリンク上の点との距離に基づいて算出する。
(もっと読む)
携帯機器
【課題】携帯機器に設けられた測位装置の電力消費を低減する。
【解決手段】デジタルカメラ等の携帯機器にGPSレシーバ21が搭載され、現在位置を検出する。検出した現在位置に一定時間以上変化がない場合に、その位置をユーザの自宅等の生活圏とみなし、生活圏に位置する場合にはGPDレシーバ21の受信周期を通常よりも増大させて電力消費を削減する。
(もっと読む)
測位装置
【課題】未知局102からの電波を複数の受信装置100で受信し、その受信時間の差から未知局102の測位を行う際、各受信装置100内部の遅延時間を合わせる必要がある。
【解決手段】電波検出用の受信機に加え、第2の受信機であるGPS受信機を設ける。GPS衛星から時刻信号を受信し、これを測位のためのデータに関連づける。未知局102からの電波は受信され、増幅器とA/D変換器を経てデジタル信号処理回路へ入力される。この回路でFFTを施し、信号を周波数成分へ展開する。注目周波数の振幅をもとに増幅器の増幅率を制御する。ローパスフィルタはデジタル信号処理回路内に設ける。
(もっと読む)
擬似距離誤差推定方法、位置算出方法及び擬似距離誤差推定装置
【課題】擬似距離に含まれる誤差を推定するための新たな手法の提案。
【解決手段】衛星から衛星信号を受信して、受信点から当該衛星までの観測擬似距離を求める。また、受信した衛星信号のドップラー周波数を測定し、当該ドップラー周波数を用いて予測擬似距離を算出する。そして、観測擬似距離と予測擬似距離とを用いて、観測擬似距離に含まれている第1の誤差を推定する。その一方で、所与の受信位置を用いて、観測擬似距離に含まれている第2の誤差を推定する。そして、第1の誤差と第2の誤差とを用いて、観測擬似距離に含まれている真正誤差を推定する。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
測位装置およびプログラム
【課題】電池寿命の長期化、及び装置の小型化が可能となる測位装置を提供する。
【解決手段】GPS衛星から送られてくる位置情報に基づき、GPS処理部3により現在位置を計測する。傾斜スイッチ13の検出信号に基づき装置本体の振動の有無を検知するとともに、振動のない状態が一定時間以上継続したときには、停止状態にあると判断して、GPS処理部3による現在位置の計測動作を自動的に停止する。また、計測された現在位置が一定時間前の計測結果と同一であったとき、GPS処理部3による現在位置の計測動作を自動的に停止する。無意味な測位動作を停止することにより消費電力を削減する。また、サーモセンサーや加速度センサーにより装置本体の所定時間内の温度変化や姿勢変化等を検出する。それにより使用者に装着されていない状態を検知して現在位置の計測動作を自動的に停止する。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】高精度でないIMUと1台のGPS受信機とを用いて車両の位置を高精度に標定できるようにすることを目的とする。
【解決手段】初期値算出部110は、車両の出発時に3自由度2次元航法により方位角の初期値を算出する。走行時標定部121は、車両が停車するまで、方位角の初期値または前回の方位角を用いて6自由度3次元航法により位置と姿勢と方位とを標定する。停車時標定部122は、車両が停車している間、方位角を拘束する拡張ZUPTアルゴリズムに基づいて6自由度3次元航法により位置と姿勢と方位とを標定する。
(もっと読む)
測位装置およびプログラム
【課題】電池寿命の長期化、及び装置の小型化が可能となる測位装置を提供する。
【解決手段】GPS衛星から送られてくる位置情報に基づき、GPS処理部3により現在位置を計測する。傾斜スイッチ13の検出信号に基づき装置本体の振動の有無を検知するとともに、振動のない状態が一定時間以上継続したときには、停止状態にあると判断して、GPS処理部3による現在位置の計測動作を自動的に停止する。また、計測された現在位置が一定時間前の計測結果と同一であったとき、GPS処理部3による現在位置の計測動作を自動的に停止する。無意味な測位動作を停止することにより消費電力を削減する。また、サーモセンサーや加速度センサーにより装置本体の所定時間内の温度変化や姿勢変化等を検出する。それにより使用者に装着されていない状態を検知して現在位置の計測動作を自動的に停止する。
(もっと読む)
測位装置、測位方法
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
移動体端末、制御方法、およびプログラム
【課題】低消費電力化を図れるととともに、ユーザにとって利便性の高い移動体端末を提供する。
【解決手段】移動体端末10は、移動体端末10の現在位置を、予め定められた周期で測位する測位部と、現在位置を表した位置情報を、基地局21,22,31を介してサーバ装置に送信する送信部と、基地局を介してサーバ装置から、位置情報に関連した情報を受信する受信部と、CSGセル310の各々の識別情報を含んだリストを記憶するための記憶部と、リストを用いて、CSGセル310に移動体端末10が入ったことを検出する検出部と、CSGセルに移動体端末10が入ったことが検出されると、測位の周期を、周期T1から周期T1よりも長い周期T2に変更する周期変更部とを備える。
(もっと読む)
位置測定システム、誤差補正装置、制御方法、及びプログラム
【課題】対象物の位置を測定すること。
【解決手段】対象物200の位置を測定する位置測定装置110と、位置測定装置110が測定して得られた対象物200の位置情報の誤差を補正する誤差補正装置120とを備え、誤差補正装置120は、位置測定装置110が測定して得られた対象物200の位置情報を、対象物200の周囲の地勢情報に基づいて補正した補正位置情報を出力する補正位置情報出力部を有する。
(もっと読む)
計測システム、移動体装着端末及びデータ処理装置
【課題】 大規模なゲート等の設置を必要とせずに、競走馬に意識させずに設置でき、高速で駆ける競走馬のハロンタイムを確実に自動取得できる計測システム、移動体装着端末及びデータ処理装置を提供する。
【解決手段】 計測システムは、無線中継装置、移動体装着端末及びデータ処理装置を具備する。無線中継装置は、無線通信を行うための無線エリアを形成する。移動体装着端末は、無線エリア内を移動する移動体に装着され、GPSユニット及び無線ユニットを備える。GPSユニットは、移動体の位置情報及び位置情報を取得したときの時刻情報をGPSにより取得する。無線ユニットは、位置情報及び時刻情報を無線信号に変換し、無線信号を無線中継装置へ送信する。データ処理装置は、無線中継装置を介して移動体装着端末からの無線信号を受信し、位置情報及び時刻情報に基づき、移動体が無線エリア内において予め設定された距離を移動するのにかかる時間を算出する。
(もっと読む)
GNSSアプリケーションのためのエフェメリス拡張方法及び機器
【課題】長期間有効な衛星予測データを計算し、そのデータを圧縮して、圧縮したデータをGNSS受信機に供給するための方法及び機器を提示する。
【解決手段】著しく小さいファイルサイズの衛星予測データを生成して、遠くの受信機に送信するために、物理モデルを考慮した多段階の圧縮工程によりデータを圧縮する。
(もっと読む)
161 - 180 / 2,510
[ Back to top ]