
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
41 - 60 / 456
位置推定装置、位置推定方法およびプログラム
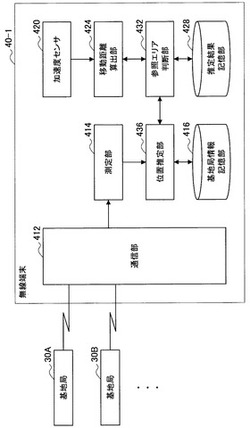
【課題】位置推定装置、位置推定方法およびプログラムを提供する。
【解決手段】基地局の位置情報を記憶している基地局情報記憶部と、前記基地局情報記憶部に記憶されている位置情報が制限範囲内である基地局の位置情報、および当該基地局から送信された無線信号の信号強度の測定情報に基づき、前記無線信号の測定位置を推定する位置推定部と、を備える位置推定装置。
(もっと読む)
信号処理装置

【課題】レンジパラメタライズド拡張カルマンフィルタを適用して目標の二次元角度情報からその三次元情報を推定する信号処理装置の計算量を低減する。
【解決手段】目標の二次元角度情報、及び二次元角度センサの位置情報から目標の三次元情報を推定する際に、その二次元角度情報が真の目標か誤警報等かを判定し、真の目標であると判定された場合に目標の三次元情報の推定処理を開始することにより、真の目標以外に対する、レンジパラメタライズド拡張カルマンフィルタによる不要な演算処理を抑制する。また、目標の概略距離を推定し、推定の対象とする距離範囲を限定した上でレンジパラメタライズド拡張カルマンフィルタによる推定処理を実行することにより、推定精度を劣化させることなく、並列動作させる拡張カルマンフィルタ数を少なくして計算量を低減する。
(もっと読む)
局地的地形に関する知識を利用した位置決定システムにおける完全性監視
【課題】複数のパラメータ測定値から受信機の位置推定値を導出するシステムと方法を提供する。
【解決手段】相関関数から各測定値を導出する。相関関数は受信機で受信した信号と、受信機が受信できる送信機を一意的に識別する識別符号との相関を取ることによって順次導かれる。複数の測定値の異なる部分集合から、複数の位置推定値の各々が導かれる。局地的地形に基づいて、位置推定値の1つが受信機の位置の最良推定値として選定される。
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【課題】移動局ユニットの位置決めの精度を改善する。
【解決手段】無線通信システムでは、移動局ユニットの位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。
(もっと読む)
ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】ユーザによる検索およびユーザの移動に基づく履歴情報等のある地点に位置情報を補正することができるナビゲーションシステム、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、利用者の現在位置情報を取得し、取得された現在位置情報に基づく現在位置から所定範囲に存在する、検索履歴地点および移動履歴地点を、現在位置補正の候補地点として抽出し、現在位置情報、および、候補地点の地点情報を出力部を介して出力させ、利用者により入力部を介して出力された候補地点の地点情報が選択された場合、当該選択された当該地点情報に基づく当該候補地点を補正地点とし、当該補正地点を現在位置として補正する。
(もっと読む)
位置情報送信機設定システム、位置情報送信機及び位置情報送信機の設定方法、
【課題】位置情報送信機の位置データ又はPRN番号の設定作業の作業性を向上する。
【解決手段】設定用端末から複数の位置情報送信機に対して、応答を求める第1の信号を無線通信により送信し、第1の信号を受信した複数の位置情報送信機から設定用端末に対して、第1の信号に応答する第2の信号を無線通信により送信し、第2の信号を受信した設定用端末から、第2の信号を送信した複数の位置情報送信機のうち特定の位置情報送信機との通信を確立するための第3の信号を、特定の位置情報送信機に対して、無線通信により送信し、特定の位置情報送信機との通信確立後に、設定用端末から特定の位置情報送信機に対して、特定の位置情報送信機の位置データを設定するための第4の信号を無線通信により送信することにより、位置データを設定する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
到来方向標定装置および位置標定装置
【目的】本発明は、複数のアンテナで受信波の到来方向を求める到来方向標定装置と、複数の到来方向に所定の航法を適用することにより受信波が送信された位置を求める位置標定装置とに関し、構成の大幅な複雑化を生じることなく、柔軟に精度よく到来方向を求めることができる到来方向標定装置と、位置標定装置とを提供することを目的とする。
【解決手段】送信源から複数の位置に到来した受信波に基づいて受信波の到来方向を求める到来方向取得手段と、複数の位置と、到来方向と、所定の航法とに基づき受信波の送信源の推定方位を求める方位推定手段と、推定方位に対する到来方向の偏差と規定の範囲とに基づいて、到来方向毎に規定の範囲の内外を判別する判別手段とを備える。
(もっと読む)
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
(もっと読む)
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】位置決定における誤警報の処理のための方法および装置を提供する。
【解決手段】方法は位置決定処理における測定値誤警報確率を推定して使用し、推定された測定値誤警報確率は決定された位置ソリューションの信頼性または収集としての測定値のセットの信頼性を決定するために結合され、推定された測定値誤警報確率は誤った測定値の分離および除去において使用される。例えば、誤った測定値を識別するための伝統的な幾何学ベースのメトリックは誤った測定値を決定するために測定値誤警報確率に従ってさらに重みづけされる。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えつつ、目的地に近づくと正確に測位を行えるようにする。
【解決手段】携帯端末は、第1測位部で測位し、現在位置から目的地までの距離が第1測位部の誤差の距離を超えている場合には、現在位置から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。携帯端末は、現在位置から目的地までの距離が第1測位部の誤差の距離未満である場合には、第2測位部に電力を供給して第2測位部で測位を行う。携帯端末は、第2測位部で測位した後、目的地に到達しているか否か判定し、目的地に到達している場合には、目的地に到達したことをユーザーに報知する。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できるようにする。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
(もっと読む)
位置情報記録装置、同装置を備える撮像装置および位置情報記録方法
【課題】 電波受信不能時には相対的な位置情報を記録し、電波受信が可能になったときに相対的位置情報を測位情報に変換し記録する位置情報記録装置等に関する。
【解決手段】 無線信号を受信する受信手段、測位情報を記録する合図を発する操作手段、無線信号に基づいて地理的位置を測位し測位情報を算出する位置情報算出手段、測位情報を記録する測位情報記録手段、基準位置からの方向と移動距離からなる変位情報を算出する移動軌跡情報算出手段、合図が発せられたとき測位情報が得られていないときには変位情報によって基準となる位置からの相対的な位置に係る相対位置情報を算出し合図に係る情報と関連づけて記録する相対位置情報記録手段と、測位情報が得られたとき、相対位置情報記録手段にすでに記録されている相対位置情報を測位情報に変換する位置情報変換手段、を有する位置情報記録装置による。
(もっと読む)
端末位置特定システム、移動端末及び端末位置特定方法
【課題】AR技術において、移動端末の位置を高精度且つ確実に特定することが可能とする。
【解決手段】端末位置特定システムでは、移動端末の概略位置情報に基づき、当該概略位置から所定の距離以内に存在するランドマークのランドマーク情報が検索され、検索されたランドマーク情報が移動端末に送信される。これにより、移動端末は、移動端末の周辺に存在するランドマークに関するランドマーク情報を取得することができる。また、サーバにおいて予め記憶されていたランドマーク情報が移動端末に送信されるので、確実にランドマーク画像に基づく移動端末の位置特定を行うことが可能となる。そして、ランドマーク画像に基づき当該画像の撮影位置が解析され、その撮影位置が移動端末の所在位置として移動端末において管理され、位置の補正に用いられるので、高精度な移動端末の位置特定が可能となる。
(もっと読む)
移動無線測位装置
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
ナビゲーション信号送信装置、ナビゲーション信号送信方法および位置情報提供装置
【課題】屋内でマルチパスフェーディングの大きい環境においても精度を低下させることなく位置情報を提供する位置情報提供システムを提供する。
【解決手段】
位置情報提供装置100は、屋内送信機200から送信される、異なったPRNコードでスペクトラム拡散符号化され、送信アンテナTX−ANT1およびTX−ANT2から各々送信される測位信号を、受信アンテナRX−ANTにより受信する。位置情報提供装置100は、送信信号のPRNコードをそれぞれ独立で非同期でサーチする。始めに一つ目のPRNコードが捕捉できた場合、その同期ループを用いて他チャネルにて他のPRNコードの捕捉を試みる。2つのチャネルで同期捕捉ができた場合は、一方のチャネルの信号を選択して、測位の処理が実施される。
(もっと読む)
位置情報発信機、位置情報受信機、および位置測位システム
【課題】移動する状況において、位置を測位することができる位置情報発信機、位置情報受信機、および位置測位システムを提供する。
【解決手段】現在地を特定するための位置情報を発信する位置情報発信機であって、現在地の緯度を示す複数の第1の位置情報と現在地の経度を示す複数の第2の位置情報とを記憶する記憶部と、記憶部に記憶された第1の位置情報を含む無線信号である第1の位置情報信号と第2の位置情報を含む無線信号である第2の位置情報信号とを生成し、生成した第1の位置情報信号と第2の位置情報信号とを発信する発信部と、第1の位置情報信号を異なる周期で繰り返し発信し、第2の位置情報信号を異なる周期で繰り返し発信するように、発信部を制御するタイミング制御部と、を備える。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置が既知である複数の基地局20と位置推定対象である移動局10との一方向又は双方向通信により取得した所定の信号に基づき、複数の基地局20と移動局10との観測距離を計測する距離計測部32と、距離計測部32により計測された複数の基地局20の観測距離に基づき、予め定められた移動局の推定初期位置40の方向に各基地局20の観測座標を決定する観測座標決定部34と、観測座標決定部34により決定された複数の基地局20の観測座標から移動局10の代表位置を移動局10の推定位置50として算出する推定位置算出部36と、を有する位置推定装置を提供する。
(もっと読む)
位置決定のための方法及び装置
【課題】効率的な位置決定のための方法及び装置を提供する。
【解決手段】この方法及び装置において、1つ又はそれ以上のアプリケーション201、202は、測位方法選択装置204に測位データを要求する。測位方法選択装置は、アプリケーション及び/又はユーザーによって規定される設定に従い、1つ又はそれ以上の測位方法205−209を使用して、このアプリケーションに測位データを提供する。測位方法選択装置204は、アプリケーション201、202から測位要求を受け取り、このアプリケーションによって要求される測位の質を表すパラメータ(1つ又はそれ以上)を形成し、測位方法によって提供される測位データの質をアプリケーションによって要求される測位の質と比較し、測位要求に応答してアプリケーション201、202に測位データを送る。
(もっと読む)
オブジェクトの絶対配置パラメータの決定方法、そのコンピュータプログラムおよび制御設備
【課題】センサによって供給される相対位置パラメータに基づいて、オブジェクトの絶対位置を決定する。
【解決手段】オブジェクトの集合のうちの2つのオブジェクト間の相対配置パラメータをそれぞれ取得するステップ(210;210*)と、受信したそれぞれの相対配置パラメータに相対配置パラメータの信頼性と呼ぶ値を関連付けるステップ(211;211*)と、相対配置パラメータの信頼性に応じて、作業用部分集合を選択するステップ(214;214*)と、作業用部分集合に属するオブジェクトと作業用部分集合外のオブジェクトとの間の新たな相対配置パラメータをそれぞれ決定するステップ(230;230*)と、決定した新たな相対配置パラメータのそれぞれに、作業用部分集合のオブジェクトの相対配置パラメータの信頼性に基づいて計算した信頼性を関連付けるステップ(232;232*)のループ(212;212*)を少なくとも1回実施する。
(もっと読む)
41 - 60 / 456
[ Back to top ]