
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
161 - 180 / 456
屋内外判定装置、屋内外判定方法および屋内外判定プログラム、並びに、測位システム、測位方法及び測位プログラム
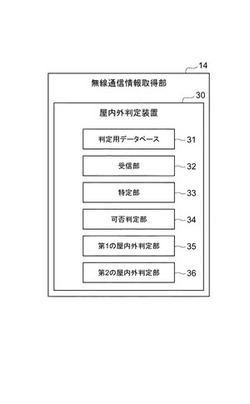
【課題】受信機の位置が屋内か屋外かを適切に判定する。
【解決手段】屋内外判定装置30は、判定用DB31と、対象の受信機から受信信号の無線信号源の識別情報を含む測定レポート情報(MR)を受信する受信部32と、MRより受信信号の無線信号源数Nを特定する特定部33と、無線信号源数Nが、第1の屋内外判定法に基づく屋内外判定が可能な最小限の無線信号源数M以上か否かを判定する可否判定部34と、N≧Mの場合に第1の屋内外判定法に基づく屋内外判定を実行する第1の屋内外判定部35と、N<Mの場合に第2の屋内外判定法として、MRに含まれた無線信号源の識別情報の組合せに対応する屋内外特徴情報に基づく屋内外判定を行うか、又は、無線信号源数Nと無線信号源数最小値Qと第2の屋内外判定法に基づく屋内外判定が可能な最小限の無線信号源数Pとに基づく屋内外判定を行う第2の屋内外判定部36と、を備える。
(もっと読む)
移動体位置推定システムと移動体位置推定方法及び移動体位置推定プログラム

【課題】設置センサの位置情報を自動でキャリブレーションしつつ移動体の位置計測も合わせて行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定するシステムにおいて、測定領域内に互いに分散して配置され、互い移動体Mまでの距離を3個以上の距離センサT1〜Tnで計測し、位置推定算出装置Pにて、距離センサそれぞれから任意の時刻のセンサ計測値を取得し蓄積し、取得蓄積された各距離センサのセンサ計測値に対して距離に応じた信頼性の度合いを示す距離信頼度を付与し、取得蓄積されたセンサ計測値のうち信頼度の高い計測値を採用して距離センサ及び移動体それぞれの位置を推定するようにし、位置推定の処理は、移動体Mの移動前後の位置それぞれの2個以上の距離センサから得られるセンサ計測値を用いて各距離センサの位置のキャリブレーション及び前記移動体の移動位置の推定を行う。
(もっと読む)
領域指定装置、通信システム、および領域指定方法
【課題】物理的な領域の指定を行う装置の製造コストや設置スペースを削減する。
【解決手段】移動可能なマーカにおいて、プリンタまたはPCなどの他端末から、無線通信により他端末の位置を取得する他端末位置取得部と、移動の過程で他端末との距離を測定する距離測定部と、少なくとも3つの他端末の位置及び他端末との距離に基づき、マーカの位置を算出する自端末位置算出部と、マーカの位置を、マーカの位置を境界とした物理的な領域を指定する他端末に送信する自端末位置送信部と、を備えることを特徴とする。
(もっと読む)
衛星信号判定装置及び衛星信号受信装置
【課題】衛星の信号から得られる衛星の軌道情報の信頼性を高める。
【解決手段】異なる時点に取得した共通データ、前半データ、後半データのアルマナックデータ発行番号IODaの値が同じであることのみならず、異なる時点に取得した共通データ、前半データ、後半データの取得日の日付が同じであることも条件として、異なる時点に取得した共通データ、前半データ、後半データのアルマナックデータを正式に保存部9に保存するようにする。
(もっと読む)
測位システム用のディジタル地形モデル高度の記憶と高速検索のための方法およびシステム
【課題】ディジタル高度モデルの圧縮されたインデックス付き高度を生成してアクセスするための方法と装置。
【解決手段】本発明の一態様では、第1の圧縮された高度データを生成するためにディジタル高度モデル(DEM)の第1の部分の高度データを圧縮する工程と、第1のインデックスによってポイントされた記憶場所にこの第1の圧縮された高度データを記憶する工程と、この第1のインデックスを記憶する工程とを含む。また他の態様では、第1のインデックスを使用してディジタル高度モデル(DEM)の第1の圧縮された部分を突き止める工程と、このディジタル高度モデル内の少なくとも1つのサンプル地点に関する第1の高度データを検索するために第1の圧縮された部分を復元する工程とを含む。
(もっと読む)
運動センサを使用した無線ベースの測位調整
運動センサを使用して、移動局の無線導出された位置を調整するための装置および方法が提示される。一方法は、無線信号測定値に基づいて、移動局の位置を推定するステップと、相対運動センサを使用して、移動局の移動を測定するステップとを含む。この方法は、測定された移動に基づいて、移動局の変位を検出するステップと、その変位がしきい値未満であることを決定するステップと、次いで、相対運動センサからの情報を使用して、移動局の推定された位置を調整するステップとをさらに含む。装置は、無線トランシーバと、相対運動センサと、無線トランシーバと相対運動センサとに結合されたプロセッサと、プロセッサに結合されたメモリとを含む。このメモリは、プロセッサに、運動センサを使用して、無線導出された位置を調整させるための方法を実行させるための実行可能な命令およびデータを格納する。 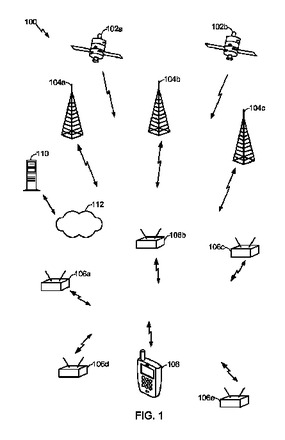 (もっと読む)
(もっと読む)
調整されたラウンドトリップ時間測定を使用した無線位置決定
移動局の位置を無線で決定するための一方法は、複数の無線アクセスポイントへのラウンドトリップ時間(RTT)を測定する段階と、各無線アクセスポイントに関連するラウンドトリップ時間遅延および初期処理時間に基づいて各無線アクセスポイントへの第1距離を推定する段階と、補足的情報に基づいて各無線アクセスポイントへの第2距離を推定する段階と、各無線アクセスポイントへの第1距離推定と第2距離推定とを組み合わせる段階と、組み合わされた距離推定に基づいて位置を計算する段階とを含む。別の方法は、無線信号モデルに基づいて各無線アクセスポイントへの距離を測定する段階と、測定された距離に基づいて移動局の位置を計算する段階と、移動局の計算された位置に基づいて各無線アクセスポイントへの計算された距離を決定する段階と、無線信号モデルを更新する段階と、無線信号モデルが収束したかどうか決定する段階とを含む。  (もっと読む)
(もっと読む)
ナビゲーション信号送信装置、受信機、ナビゲーション信号の生成方法およびナビゲーション信号生成プログラム
【課題】受信機側での高感度受信に与える干渉を抑制することが可能なナビゲーション信号送信装置を提供する。
【解決手段】屋内送信機200は、屋内送信機の位置情報を含むメッセージを生成するメッセージ生成部202と、メッセージを拡散処理するために、この屋内送信機に予め割り当てられている拡散コードを生成するコード生成器204とを含む。屋内送信機200は、さらに、基準クロックに対して、所定の周波数オフセットΔfを生じさせるようなクロック周波数の変換を行うクロック調整部208と、クロック調整部208からの調整後のクロックに基づいて、搬送波を生成するキャリア生成器210とを含む。
(もっと読む)
移動端末、測位方法
【課題】GPS衛星を利用できない場合でも、測位を容易に行う。
【解決手段】位置が既知である移動通信基地局50Kと移動端末10との距離、位置が既知であるデジタル放送送信所50Sと移動端末10との距離、位置が既知であり、かつ、電波時計の時刻情報を送信する電波時計情報送信所50Tと移動端末10との距離、をそれぞれ算出し、それらを組合せて利用する。こうすることにより、GPSが全く利用できない場合でも移動端末10の位置を特定することができる。
(もっと読む)
3次元測位システム
【課題】単一の発信手段から発信される測定信号を単一の受信手段で受信することによって、高精度の3次元測位を可能とする。
【解決手段】単一の発信手段2において、アンテナ10a〜10dおよび10e〜10hを周期的に切替えながら、超音波信号あるいは高周波信号あるいは光信号に含まれた測定信号を放射し、単一の受信手段6によって受信する。前記受信手段6において、前記アンテナ10a〜10dおよび10e〜10hに対応して受信する測定信号から搬送波信号あるいは副搬送波信号を再生して位相差を測定し、前記発信手段2の複数組のアンテナからみた受信手段6の方向11および12の測定結果と、前記複数組のアンテナの間隔13とから、前記受信手段6の3次元の位置を高精度で測位する。
(もっと読む)
歩行者誘導支援システム
【課題】歩行者が向かっている方向を高精度であり高信頼度で測定をするとともに、複数の発信手段からの方向と距離を高精度であり高信頼度で測定することによって、歩行者の歩行を誘導し支援するための信頼性の高い歩行者誘導支援システムを可能とするもの。
【解決手段】少なくとも2基の指向性アンテナ21c、21dあるいは21e、21fを接続して周期的に切替えながら同期信号および報知情報を含む測定信号をバースト状に放射する複数の発信手段1a、1bと、少なくとも2基の指向性アンテナ21a、21bを接続して周期的に切替えながら前記測定信号を受信して歩行者の歩行を誘導し支援を行なうための受信手段2から構成されている。
(もっと読む)
揺動構造物の動きを判定するシステム
レシーバを固定的に取り付けた揺動構造物の動きを判定するシステムを提案する。位置を把握及び固定した少なくとも3つの基準トランスミッタを設け、これらの基準トランスミッタはレシーバが受信する送信信号を規定のキャリア周波数で送信する。システムは評価装置をさらに備えるが、この評価装置は規定キャリア周波数を考慮しつつ、受信信号から測定位相値を判定する。基準トランスミッタからの距離と、レシーバの位置の変化、即ち揺動構造物の位置の変化を、前記位相値から計算することができる。 (もっと読む)
無線ネットワーク・ベースの位置推定
本発明は、無線ネットワーク(100)の中で、例えば、アクセス・ポイント(「AP」)(102A、102B、102C)及びクライアント装置(104A、104B、104C)などの装置の位置を概算することに関する。位置推定値は、APによって送信又は受信されたパケット(314)を観察/分析することによって得ることができる。例えば、パケットに関連したデータ転送速度情報は、装置とAPとの間の距離を概算するために使用される。これは既知の位置決め情報と接続して、APの概略の位置を推定することができる。装置がAPであるか又はその位置についての信頼度やメトリクス(404、406、408、410)も決定される。位置決定の精度は、伝搬及び環境要因、送信電力、アンテナ利得及びダイバーシチなどによって影響される。APの位置情報データベース(112)は、種々の装置からの時間にわたる測定値を使用できる。そのような情報は、クライアント装置の位置を特定し、かつそれらに位置ベースのサービスを提供できる。  (もっと読む)
(もっと読む)
追跡システム
アセットの規定された地理的境界への進入および/またはそこからの退出を地理的に追跡し、それらを報告するための装置、方法およびシステム。進入および退出テストは、アセットが地理的境界に進入したかまたは退出したかを判断するために、位置フィックスを様々なしきい値およびパラメータと比較する。テストは、より低い複雑さレベル(より低い次数)を有するテストが、より高い複雑さレベル(より高い次数)を有するテストの前に実行されるように、順序付けられる。このようにして、たいていの位置フィックスは、従来どおり実装されるよりも低い次数の数学的複雑さを有する計算を使用して処理される。 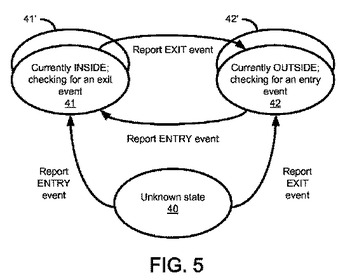 (もっと読む)
(もっと読む)
測位システム、測位システムに適用可能な送信機および受信機
【課題】ノイズやマルチパスの影響下においても精度のよい測位システムを提供する。
【解決手段】移動局10においては、符号発生部28によって発生される第1符号と所定時間だけ遅れた第2符号とにより、変調部34において第1搬送波と所定位相だけ遅らされた第2搬送波とがそれぞれ変調させられ、合成部44により変調後の信号が合成され送信される。基地局12においては、復調部78により第1基準搬送波および所定位相だけ遅らされた第2基準搬送波に基づいて受信波が復調され、相関演算部88により復調された2つの信号と対応する符号との相関値がそれぞれ算出され、差動アンプ96により算出された2つの相関値の差分が算出され、受信時刻検出部70により2つの相関値の差分に基づいて電波の受信時刻が算出される。また、測位部100はその受信時刻に基づいて移動局10の位置を算出する。
(もっと読む)
移動局測位システム
【課題】電波の周波数と基地局とを選択することにより精度の高い測位を行なうことのできる移動局測位システムを提供する。
【解決手段】移動局10の移動局無線部22より、拡散符号を含む電波が複数種類の周波数により送信され、基地局12においては受信された電波とレプリカ符号との規格化相関値が相関値算出部39(SA2など)により算出される。測位周波数設定部58(SA4)により、各周波数について算出された規格化相関値のうちN−1番目に大きい値が比較され、その大きさが最大となる周波数が測位周波数として設定され、測位基地局選択部60(SA5)により、測位周波数において各基地局12で算出される規格化相関値の値が大きい順にN−1局の基地局を含むように測位基地局12が選択される。測位部66は、選択された測位基地局12と移動局10との間で測位周波数の電波の送受信を行った受信結果に基づいて移動局10の測位を行なう。
(もっと読む)
測位システム
【課題】複数の基地局12の位置が分からない場合や、基地局12どうしの時計の未知の時間ずれがある場合であっても、移動局10の位置を精度よく算出できる移動局測位システムを提供する。
【解決手段】測位部62により、位置情報が既知であり、複数の基地局12との間で電波の送受信が可能な複数の基準局11の位置情報と、複数の基準局11と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻に基づいて複数の基地局12の有する時計40の時間ずれおよび位置が算出され、さらに測位部62により、算出された複数の基地局12の有する時計40の時間ずれ情報および位置情報と、移動局10と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻とに基づいて移動局10の位置が算出される。
(もっと読む)
端末装置、通信システム及び位置の測定方法
【課題】移動端末が所要数のGPS衛星を捕捉できず、かつ移動端末が基地局との通信可能圏内にない状態下にあっても、移動端末に自機の位置の測位を可能にする。
【解決手段】移動端末T1は、GPS衛星S1〜S3から受信したGPS信号に基づいて自機の位置を測定する第1測位手段12と、基地局BSから受信した基地局情報に基づいて自機の位置を測定する第2測位手段13と、第1測位手段12及び第2測位手段13による測位の可否を判定する判定手段11と、第1測位手段12及び第2測位手段13のいずれも測位ができないと判定されたときに他の移動端末T10〜T12に対してその端末位置情報を要求する端末位置情報要求手段14と、他の移動端末T10〜T12からの端末位置情報を受信する端末位置情報受信手段15と、受信される前記端末位置情報に基づいて自機の位置を測定する第3測位手段16と、を備える。
(もっと読む)
位置推定装置
【課題】車々間通信が直接可能なエリア外に周辺車両が存在する環境において、この周辺車両の位置を推定する際に行われる車々間通信における通信量を、より少なくすることができる位置推定装置を提供する。
【解決手段】自車両Aからの車々間通信が直接可能な第一通信エリアRa内に位置する通信車両B〜Dのそれぞれから、通信車両B〜Dの位置情報、通信車両B〜Dからの車々間通信が直接可能な第二通信エリアSb〜Sdに関するエリア情報、及び第二通信エリアSb,Sc内に位置する第二周辺車両Xを識別するための車両IDを取得する車々間通信機2と、車々間通信機2により取得された情報に基づいて、第二周辺車両Xが含まれる第二通信エリアSb,Sc内であって第一通信エリアRa外である位置推定領域Tを、第二周辺車両Xが位置する可能性を有する領域として算出する他車両データ処理部3とを備える。
(もっと読む)
広域測位システム
受信機の位置を決定するためのシステム及び方法が記載される。測位システムは、測位信号をブロードキャストする送信機を含む送信機ネットワークを含む。測位システムは、測位信号及び/又は衛星信号を取得して追跡するリモート受信機を含む。衛星信号は衛星ベースの測位システムの信号である。リモート受信機の第1のモードは、リモート受信機が測位信号及び/又は衛星信号を使用して位置を計算する、端末ベースの測位を使用する。測位システムはリモート受信機に結合されたサーバーを含む。リモート受信機の第2の動作モードは、サーバーが測位信号及び/又は衛星信号からリモート受信機の位置を計算する、ネットワークベースの測位を含み、リモート受信機は測位信号及び/又は衛星信号を受信してサーバーに転送する。  (もっと読む)
(もっと読む)
161 - 180 / 456
[ Back to top ]