
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
1 - 20 / 456
測位装置、測位方法、測位プログラムおよびコンピュータ読み取り可能な記録媒体
情報提供装置、及びプログラム
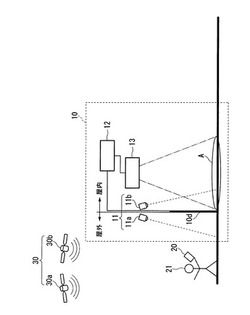
【課題】屋内GPS信号(エリア内情報)を用いるか否かの判定における切り替えの精度を向上させる情報提供装置を提供する。
【解決手段】情報提供装置(10)は、サービス対象のエリアの出入り口(10d)の近傍にユーザがいるか否かを検出する検出部(11)と、検出部による検出結果に応じて扉の開閉を行う扉制御部(12)と、扉制御部が扉の開閉動作を行う際に、当該扉の開閉動作を行うことを表す開閉情報とエリア内情報とを含む第2の測位信号を、出入り口の近傍に存在する通信可能な領域内の端末装置(20)へ送信する送信部(13)とを有することを特徴とする。
(もっと読む)
マルチモードのGPS使用可能カメラ

【課題】GPS使用可能移動局記録デバイスにおいてロケーション位置を画像にタグ付けするために、カメラを具備するデバイス中で画像に地理的タグ付けする方法で、画像を取り込み、ポジションを決定するし、決定したポジションを画像にタグ付けする。
【解決手段】画像を取り込むことと、衛星信号とワイヤレスネットワーク信号との検出に基づいて、ポジションを決定することと、決定したポジションを画像にタグ付けすることとによって、画像に地理的タグ付けする。
(もっと読む)
測位正確度算出方法及びその装置並びにこれを用いた端末の測位方法及びその装置
【課題】複数の測位技術のうち現在の位置で最上の測位正確度を有する測位技術を選択して端末の位置を測定することのできる測位正確度算出方法及びその装置並びにこれを用いた端末の測位方法及びその装置を提供する。
【解決手段】測位正確度算出方法は、測位正確度算出方法において、端末で用いられる測位技術に対応するマップを提供するステップと、前記マップから前記端末の位置を含む特定領域に対するマップ情報を読み出すステップと、前記特定領域に対するマップ情報に基づいて前記測位技術による測位正確度を算出するステップとを有する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの歩行テンポを示す第1の値を取得する取得部と、上記絶対位置に基づいた所定距離移動したことをトリガとして、上記ユーザの歩幅又は移動速度を示す第2の値を算出する算出部と、算出される上記第2の値を用いて、上記第1の値及び上記第2の値の対応関係を学習する学習部と、を有する。
(もっと読む)
2つのアンテナまたはその同等物を使用してナビゲーションビーコン信号を検出するための方法
【課題】位置決定の正確さを向上させる、ナビゲーションビーコン信号を検出するための方法を提供する。
【解決手段】2つのアンテナ11,12または1つの合成開口アンテナのいずれかを使用し、干渉除去ビームを形成するために複数のアンテナ重み成分を使用して複数の別個の測定値を結合することによって、複数のナビゲーションビーコン信号21,22,23を検出する。一実施形態では、複数のアンテナ重み成分は、固有値処理によって決定される。他の実施形態では、複数のアンテナ重み成分は、簡略化された処理によって決定される。他の態様では、単一のアンテナが、最初に受信される測定値を受信するために使用される。最初に受信された測定値のコピーが作成され、空間ダイバーシティをエミュレートするために適切な時間遅延を達成するように処理される。最初に受信された測定値および処理されたコピーは、干渉除去ビームを形成するために結合される。
(もっと読む)
無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム
【課題】無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム。
【解決手段】非支援のGPS型位置決定をサポートする際に、無線通信システムにおける加入者局のシード位置を導出する方法およびシステムにおいて、加入者局は、無線通信システムからオーバーヘッドメッセージを受信し、パラメータ値からシード位置を導出する。加入者局は、そのメモリ内のデータ構造を使用し、可能なパラメータ値をシード位置として働き得る対応する位置にマッピングすることができる。データ構造は、更新条件に対応して更新することができる。
(もっと読む)
移動通信ネットワークにおける測位システムおよび測位方法
【課題】クライアント装置からの測位精度の要求クラスに応じて適切な応答を生成する測位システムを提供する。
【解決手段】クライアント装置101は、要求する測位精度とその要求クラスとを指定してサーバ装置102に対し移動機103の測位要求を送信する。サーバ装置102は、プライバシ設定情報に基づきプライバシチェックを実行後、測位要求を送信し、測位処理の結果を得る。サーバ装置102は、クライアント装置101が要求する測位の精度を確認し、要求精度を満たす測位結果が存在すればその測位結果を応答する。要求精度を満たす測位結果が存在しない場合、サーバ装置102は精度の要求クラスを確認し、第2のクラス(”Best Effort”)のときは、測位精度の最も高い測位結果を選択してクライアント装置101に応答し、第1のクラス(”Assured”)のときはエラーを通知する。
(もっと読む)
携帯端末、位置測定方法及びプログラム
【課題】GPS衛星から発信された電波が届かない場所であっても、周囲の通信環境に応じて自位置を適切に測定することができる携帯端末、位置測定方法及びプログラムを提供する。
【解決手段】通信部101は、通信規格が異なる2以上の通信装置(CDMA)1011等を介して、周辺装置20に、周辺装置20の位置情報と位置情報を発信するための準備時間である応答期間とを含む位置関連情報を取得したい旨の位置関連情報取得要求を送信するとともに、周辺装置から位置関連情報を受信する。時間測定部1092は、位置関連情報取得要求を送信してから位置関連情報を受信するまでの応答待ち期間を測定する。距離測定部1093は、応答待ち期間と応答期間とに基づいて周辺装置位置情報が示す位置から自位置までの距離を測定し、自位置測定部1094は、測定した距離と受信した周辺装置位置情報が示す位置とに基づいて自位置を測定する。
(もっと読む)
位置標定可用性を増加させるための手続
【課題】位置を決定するためのスキームの各々は、時々不正確になりまたは利用できないかもしれない。従って、任意の位置決定スキームを使用した移動局またはネットワークは、移動局の現在の位置を決定するように求められたとき何らの結果も得ることができないかもしれないし、または不正確な結果を得るかもしれない。それゆえ、より大きな信頼度で移動局の位置をより確実に決定するための装置、方法およびシステムを提供する
【解決手段】位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて位置決定することを反復する。
(もっと読む)
位置情報検出システム
【課題】無線タグが付与された人物等の位置情報を正確に把握することが可能な移動体位置検出システムを提供する。
【解決手段】複数の無線タグと複数の無線アンテナと位置情報検出ソフトウェアからなる位置情報検出システムであって、前記位置情報検出ソフトウェアは、移動体位置検出システムと、位置情報エンジンからなり、前記移動体位置検出システムは、前記無線タグ及び前記無線アンテナの機種が複数混在する場合において、取得した現在の位置情報が、以前の位置情報と比較して閾値を超えている場合、前記以前の位置情報から推測して、前記現在の位置情報を補正する自動補正機能と、前記補正した現在の位置情報を保存し、前記移動体位置検出システムはアプリケーションプログラムから呼び出し可能に構成されたAPIを提供する。
(もっと読む)
振動センサー式リアルタイムGPSロガーシステム
【課題】本願発明は、リアルタイムGPSシステムにおいて必要最小限且つ高密度のGPS位置情報をより確実に発信できることに関する。
【解決手段】本願発明に従ったリアルタイムGPSシステムは、従来システムが無線サービスエリアで発信間隔ごと一箇所の位置情報しか送信しないことに対し、GPSロガーに蓄積した複数ポイントの位置情報を一定の間隔で発信する。GPSロガーにある位置情報データは振動センサーにより、動いていない時には記録しないように制御する。本発明により、最短1秒間隔の位置情報データをリアルタイムで送信できるようになり、電波が届かない場所においても、位置情報を記録し続け、電波回復時再度送信が可能となる。また動いていない時には無駄な位置情報を無くすることにより、通信量及び電池消耗も減る。これにより、経済的に通信費が節約できる、利用できる時間も大幅に延長できる。
(もっと読む)
3次元デジタル記録システム
【課題】構造物表面の不良箇所を3次元のデジタルデータとして記録する。
【解決手段】本発明に係る3次元デジタル記録システムは、構造物表面の不良箇所に接触している間パルス波を送信する入力装置10と、前記入力装置10からのパルス波を受信すると、パルス波を送信する3個の距離測定装置20と、を備え、前記入力装置10は、前記入力装置10がパルス波を送信した時間と、前記3個の距離測定装置20の各々からのパルス波を受信した時間との差から、前記入力装置10と前記3個の距離測定装置20の各々との距離を算出し、前記距離から前記入力装置10の位置情報を算出する制御部15と、前記位置情報を記憶するメモリ13と、を有する。
(もっと読む)
自動車に搭載されているGNSS受信機の位置を決定する方法及びシステム
【課題】自動車に搭載されているGNSS受信機の本来機能が妨害源によって意図的に無力化されているときでもGNSS受信機の位置を決定できるようにする。
【解決手段】自動車10が道路交通路上定点を通過するときに、当該道路交通路上定点20のセンサ装置21によって、妨害源12が送出している妨害信号、及び/または、妨害源により毀損されたGNSS受信機の受信信号の検出が行われる。更に、検出された信号に対して信号処理が施されることで、自動車の車上に妨害源が存在しているか否かの判定が行われる。妨害源が存在していたならば、少なくとも当該道路交通路上定点の所在位置と、当該自動車の車上に存在している妨害源とを示すデータが生成され、道路交通路上定点の所在位置に基づいて自動車の位置を決定する。
(もっと読む)
被災者救助支援システム、情報処理方法
【課題】地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
(もっと読む)
人位置検索システム
【課題】命の危険が迫っている人の位置を特定することができる人位置検索システムを提供する。
【解決手段】本発明の人位置検索システム10は、複数の基地局30で測定した電波の送信から受信までの所要時間より、ユーザが身に付けているセンサ端末20の位置を特定し、特定した位置に、センサ端末20から送信されたユーザの生体情報を対応付けて管理する。
(もっと読む)
移動デバイスの位置推定
【課題】複数の無線アクセス・ゲートウェイを使用した位置推定の方法、プログラム及びシステムを提供する。
【解決手段】移動デバイス100は、複数の無線アクセス・ゲートウェイを走査及び検出できる。移動デバイスは、移動デバイスと各無線アクセス・ゲートウェイとの間の距離の初期推定値を判定できる。移動デバイスは、サーバ108から検出された無線アクセス・ゲートウェイの位置データ109を受信できる。位置データは、各無線アクセス・ゲートウェイの推定位置、推定位置の不確定性及び各無線アクセス・ゲートウェイの到達範囲を含み得る。移動デバイスは、不確定性、到達範囲及び初期推定値を使用して各推定位置の重みを割り当てることができる。移動デバイスは、重み付けした位置を使用して移動デバイスの位置を推定できる。
(もっと読む)
測位装置および測位方法
【課題】複数の測位方式の中から、要求される測定精度を満たし、かつ消費電力の小さい測位方式を、測位環境に応じて適応的に選択すること。
【解決手段】測位装置は、複数の測位手段と、複数の測位手段に測位を実行させる測位制御部と、複数の測位手段による測位が実行される際に消費される電力を測定する消費電力測定部と、複数の測位手段により測位が実行される際に取得されるべき測位精度と、消費電力に基づいて、測位に使用すべき測位手段を設定する測位手段設定部とを有する。
(もっと読む)
地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法
【課題】地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法を提供する。
【解決手段】拡張された干渉法装置を形成する、受信アンテナ(ANT1、ANT2、ANT3)を装備する人工衛星(SAT1、SAT2、SAT3)と、各衛星用の少なくとも1つの専用センサー(CAPTd_1、CAPTd_2、CAPTd_3)、及び衛星間通信手段(COMM1、COMM2、COMM3)を含む、衛星間相対計測装置と、衛星間相対計測装置により配信される、衛星の互いの相対位置の決定から来る、受信信号の日付決定用装置(DAT1、DAT2、DAT3)と、衛星のアンテナの、少なくとも1組を含む第二の干渉法装置と、地上基地局(SBS)と、衛星上で取得した測定値を地上基地局に送信するための装置と、衛星のうちの少なくとも1つの絶対位置を決定する手段(DPA)とを含むシステム。
(もっと読む)
測位装置及び測位方法
【課題】複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすること。
【解決手段】測位装置は、現在地の測位結果を出力する複数の測位部と、複数の測位部各々について有意の測位結果が得られる確率とその測位結果に対する誤差の情報とを記憶する記憶部と、記憶部に記憶されている確率及び誤差の情報を用いて、複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、その確率及び予想される消費電力に基づいて、複数の測位部のうちの1つ以上を使用する順序を決定する制御部とを有し、複数の測位部のうちの1つ以上が順序にしたがって測位結果を出力する。
(もっと読む)
1 - 20 / 456
[ Back to top ]