
Fターム[5J062CC18]の内容
Fターム[5J062CC18]に分類される特許
81 - 100 / 451
基地局装置及び端末装置
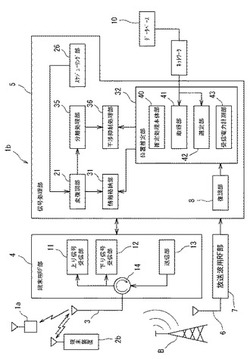
【課題】基地局装置が自己の位置を推定する。
【解決手段】基地局装置1は、端末装置2と通信するために無線信号の送受信を行う端末用RF部4と、この端末用RF部4との間で授受が行われる送受信信号の信号処理を行う信号処理部5とを備えている。基地局装置1は、更に、放送所Bから送信された放送波を受信する放送波用RF部7と、複数の放送所Bから送信され前記放送波用RF部7が受信した放送波の受信電力を用いて自己の位置を推定する位置推定部32とを備えている。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
管理サーバ、位置推定用設備システム及び位置推定システム

【課題】 金属物の多い環境でも、無線移動ノードの位置推定できる位置推定システムを提供する。
【解決手段】 本発明の位置推定システムは、無線移動ノードと、複数の無線固定ノードと、管理サーバとを有する。各無線固定ノードは、自己からの無線信号が到達する範囲が一定になるように、自己からの無線信号の電波出力強度を間欠的に調整する。無線移動ノードは、最近の所定期間内で無線信号を受信した、全ての送信元の無線固定ノードの識別情報を含む組情報を管理サーバに送信する。管理サーバは、複数の無線固定ノードの組み合わせ毎に、その組み合わせのときに無線移動ノードが位置すると推定できる位置ゾーンとを対応付けた情報を予め記憶しており、無線移動ノードから組情報が与えられたときに、この組情報をキーとして探索を行い、無線移動ノードが位置する位置ゾーンを推定する。
(もっと読む)
位置検出装置
【課題】低コスト且つ分解能が高い位置検出装置を提供する。
【解決手段】位置検出装置は、被検出体から放射される電磁波を感知し、且つ感知領域の一部が互いに重複するように配置された複数の電磁波感知部T1〜T9と、最も強い電磁波を感知した電磁波感知部T1〜T9と感知領域の一部が重複する他の電磁波感知部T1〜T9から出力される信号の大きさを第1の閾値と比較する第1の比較部と、最も強い電磁波を感知した電磁波感知部T1〜T9から出力される信号の大きさと、他の電磁波感知部T1〜T9から出力される信号の大きさとの差を、第2の閾値と比較する第2の比較部と、第1の比較部による比較結果と第2の比較部による比較結果とから、第1の比較部による比較結果と第2の比較部による比較結果との組合わせに応じた分割領域の表を参照して、被検出体が居る分割領域を判定する位置演算部とを備える。
(もっと読む)
位置推定方法および位置推定システム
【課題】送信手段が1つしかない環境でも、受信手段の位置を高い確率で推定することができる位置推定方法および位置推定システムを提供する。
【解決手段】送信手段から無線で送られてきた信号を受信した受信手段が、複数ある候補位置のいずれに位置しているのかを推定する位置推定方法であって、受信手段を各候補位置に配置して受信信号強度分布を取得するステップS1−1と、当該受信信号強度分布を位置指紋として記憶手段に格納するステップS1−2とを実行し、その後、受信手段を推定対象位置に位置させて受信信号強度分布を取得するステップS1−3と、ステップS1−3で取得した受信信号強度分布と、記憶手段に格納されている各候補位置の位置指紋との相関値を求めるステップS1−4と、相関値に基づいて各候補位置の中から推定対象位置に最も相関する候補位置を特定するステップS1−5とを実行する。
(もっと読む)
信号捕捉方法及び信号捕捉装置
【課題】航法メッセージデータのビット長よりも長い相関積算時間に亘る相関処理を可能にするための新たな手法を提案すること。
【解決手段】GPS衛星から発信されたGPS衛星信号を受信した受信信号に対して相関演算が行われる。そして、GPS衛星信号に搬送されている航法メッセージデータのビット長(20ミリ秒)以上の所定の蓄積時間に亘る相関演算結果に対して、フーリエ変換を用いた周波数解析が行われる。そして、航法メッセージデータのビット長の2倍の周期時間である40ミリ秒に相当する特定周波数(25Hz)におけるパワー値が、周波数ゼロにおけるパワー値に加算され、特定周波数におけるパワー値が「0」にされた後、逆フーリエ変換によって相関値が再構成される。そして、再構成された相関値が積算され、当該積算相関値に基づいてGPS衛星信号が捕捉される。
(もっと読む)
位置検知システムおよび方法
【課題】反射波が発生しやすい室内などの環境において、送信端末の位置を精度よく検知する。
【解決手段】受信端末10に、送信端末40からの電波を受信するアンテナとして、当該受信端末10の真下方向に主ビームを有する指向性アンテナを設けて、演算装置20において、受信端末10で得られた受信電界強度の値を非線形で強調する強調処理を行い、強調後の受信電界強度から加重平均法に基づき送信端末40の位置を算出する。
(もっと読む)
無線位置検出システムと無線位置検出方法
【課題】現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
(もっと読む)
パターン分類を使用した、無線端末が屋内にあるかどうかの推定
【課題】 無線端末が屋内にあるか否かを推定する方法及び装置を提供すること。
【解決手段】 例示的実施形態は、複数の入力/出力マッピングでトレーニングされたパターン分類器を使用し、各マッピングは個々の位置に対応し、マッピングの出力は、当該位置が屋内であるかどうかを示すブール値であり、マッピングの入力は、その位置についての経験信号データと予測信号データに基づく。例示的実施形態によると、トレーニングされたパターン分類器に基づいてコンピュータ実行可能プログラムが生成される。コンピュータ実行可能プログラムは、無線端末から報告される経験データと、おおよそ或いは不正確である可能性のあるその端末の位置の推定(例えばセル識別子(Cell−ID)、GPS等に基づく)とに基づいて、無線端末が屋内にあるか否かを推定する。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
測位システム及び測位方法
【課題】 測位に対する要求に応じて、適切な測位時間及び測位精度での測位を行う。
【解決手段】 測位サーバ10は、セルラ端末20における受信状態を示す受信状態情報に基づいて屋内外判定を行い、屋内外判定の結果に基づいて測位の終了条件を決定するハイブリッドアルゴリズム1によってセルラ端末20の測位を行う第1測位部12と、セルラ端末20における受信状態を示す受信状態情報に基づいてセルラ端末20の概算位置を算出して、当該概算位置の精度に基づいて、セルラ端末20の測位を終了するか否かを判断するハイブリッドアルゴリズム2によってセルラ端末20の測位を行う第2測位部13とを備える。
(もっと読む)
位置情報認識システムおよび方法、ならびに携帯端末およびそのプログラム
【課題】無線位置情報発信機の出力電力を、簡単に、かつ、状況の変化等に応じて柔軟に制御する。
【解決手段】隣接する複数の無線位置情報発信機10のうちの1つの無線位置情報発信機10は、他の無線位置情報発信機10から受信した電波到達範囲と自己の電波到達範囲とを比較して、電波未到着範囲と電波衝突範囲とが存在するか否か判定する。それらが存在する場合には、それらの範囲をできるだけ小さくするような各無線位置情報発信機10の出力電力レベルを決定し、決定した出力電力レベルを隣接する無線位置情報発信機10に送信する。
(もっと読む)
測位システム及び測位方法
【課題】 マッチングによる無線機の位置の推定において、高い測位精度の測位結果を得る。
【解決手段】 測位サーバ10は、セルラ端末20の位置を推定する測位システムであって、位置と当該位置におけるセルラ基地局30に応じた当該電波の伝搬時間との関係を示す情報を保持する測位用データベース11と、セルラ端末20によって受信される、セルラ基地局30に応じた電波の伝搬時間を示す伝搬時間情報を取得する伝搬時間情報取得部12と、取得された伝搬時間情報と、測位用データベース11に保持されている情報とをマッチングする比較部13と、マッチング結果に基づいてセルラ端末20の位置を推定する位置推定部14と、推定されたセルラ端末20の位置を出力する出力部15とを備える。
(もっと読む)
電磁信号源の位置特定
第1の複数のロケーションにおいてスキャニングを行うことにより、信号源位置データを生成するステップであって、信号源位置データは、前記信号源の少なくとも1つの位置の推定を表すステップと、信号検出システムを用いて第2の複数のロケーションにおいてスキャニングを行うことにより、信号検出データを生成するステップであって、信号検出データは、第2の複数のロケーションにおいて信号源から受信した信号に関連するステップと、信号検出データに基づいて信号源位置データを処理することによって、信号源位置データにおける推定誤差を修正するステップと、処理された信号源位置データを出力するステップとを含む、複数の電磁信号源のロケーションを推定する方法が提供される。 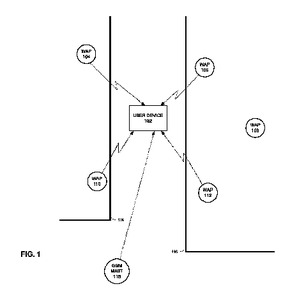 (もっと読む)
(もっと読む)
無線測位装置
【課題】第1の発受信手段、第2の発受信手段によって、2次元もしくは3次元の位置を高精度で測位できる装置を安価に実現する。
【解決手段】第2の発受信手段から少なくとも起点信号を含む無線信号を時分割でかつバースト信号として間欠発信し、第1の発受信手段において、前記無線信号を受信して前記起点信号を再生し、再生した起点信号に同期発振手段を同期させて生成した距離測定信号と、別に生成した方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら発信し、前記第2の発受信手段において、前記起点信号を基準とし、前記距離測定信号の位相を測定して第1の発受信手段からの距離を算出し、前記複数のアンテナに対応した方向測定信号の位相差を測定して第1の発受信手段が位置する方向を算出し、算出した距離と方向から自局の3次元の位置を高精度でかつ瞬時に測位する。
(もっと読む)
信号源探索方法及び信号源探索システム
【課題】小型無人航空機による信号源探索を可能とする。
【解決手段】小型無人航空機10は、ある飛行範囲において飛行軌跡20aで表されるように旋回飛行することで、機体の座標と方位を検出すると共に、位置が不明な信号源100から送信される電波(信号)を指向性アンテナにより受信する。続いて、小型無人航空機10は、別の飛行範囲40に移動し、そこで飛行軌跡20bで表されるように旋回飛行することで、機体の座標と方位を検出すると共に、信号源100から送信される電波(信号)を指向性アンテナにより受信する。小型無人航空機10に搭載されている演算装置は、機体の座標及び方位と、信号源100からの信号の受信信号強度とに基づいて、受信信号強度が最も強かった時の機体の座標と方位とから信号源100の座標を算出する。
(もっと読む)
携帯通信端末
【課題】適切な基地局を選択することにより、より安定して測位精度を向上できる携帯通信端末を提供すること。
【解決手段】携帯電話機1は、基地局から送信される当該基地局の位置情報を収集する位置情報収集部31と、基地局から受信する電波状況を測定して収集する電波状況収集部32と、位置情報収集部31及び電波状況収集部32により位置情報及び電波状況が収集された基地局の配置に関する情報が第1の条件を満たす場合に、当該配置内のうち、第2の条件を満たす基地局を選択する基地局選択部33と、基地局選択部33により選択された基地局の識別データを測位サーバへ通知し、当該基地局を介して、測位サーバから受信される測位用補助データを用いてGPS測位処理を実行する測位部と、を備える。
(もっと読む)
参照位置に対する位置の対応を決定するための装置および方法
参照位置(24)に対する位置(21)の対応を決定するための装置(30)であって、固定の無線送信機(22)の無線信号をその位置で受信できることを特徴とし、特定の無線送信機(22e)の識別子を決定するための、そして、第1の時刻(t1)にその特定の無線送信機の無線信号の信号特性を決定するための手段(32)であって、特定の無線送信機の識別子および無線信号の信号特性が、位置(21)のための測定パケット(MP)の少なくとも一部を示すことを特徴とする手段(32)と、位置(21)のための後処理された測定パケット(MP’)を得るために、測定パケット(MP)を後処理するための手段(36)であって、後処理するための手段は、第1の時刻(t1)が、特定の無線送信機(22e)の識別子が決定できた第2の時刻(t2)の前の最後の時間であって、そして、0.5秒以上の第1の時間(Δt)が、第1の時刻と第2の時刻の間にあり、その間特定の無線送信機(22e)の識別子を決定できない、第1の時刻(t1)から第1の時刻(t1)の後の第2の時刻(t2)までの間、特定の無線送信機(22e)の信号特性を少なくとも一時的に合成するために実行されることを特徴とする手段(36)と、対応を決定するために、参照位置(24)のための少なくとも1つの前に決定された参照測定パケット(RP)と、後処理された測定パケット(MP’)を比較するための手段(38)とを含むことを特徴とする装置(30)。 (もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 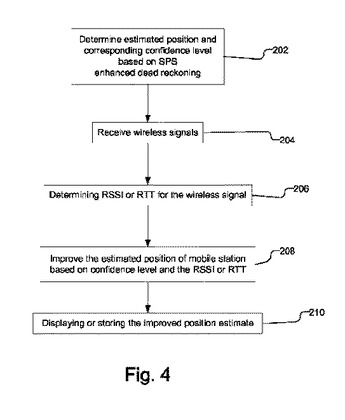 (もっと読む)
(もっと読む)
無線LANAPを利用した無線デバイスの位置追跡システム及び方法
【課題】無線LAN APを利用した無線デバイスのリアルタイム位置追跡システム及び方法を提供すること。
【解決手段】本発明の位置推定基盤データを構築する方法は、APの目録、該APの信号強度を含むAPスキャンデータ、及びAPスキャンデータを測定した位置を提供されるステップと、前記収集されたAPスキャンデータ及び前記位置のうち、少なくとも一つに対して信頼度を計算するステップと、前記計算された信頼度と、前記収集されたAPスキャンデータと位置を対応させて位置推定基盤データとして格納するステップとを含む。
(もっと読む)
81 - 100 / 451
[ Back to top ]