
Fターム[5J062DD05]の内容
Fターム[5J062DD05]に分類される特許
161 - 180 / 377
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
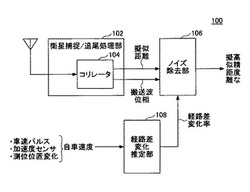
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、測位信号に含まれるコードを用いて、GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離演算部と、GNSS衛星からの直接波と反射波との間の経路差の変化率を推定する経路差変化率推定部と、経路差変化率推定部により推定された経路差の変化率に対応するフィルタの時定数を求め、該時定数を設定する時定数設定部と、時定数設定部により設定された時定数で、擬似距離演算部により求められた擬似距離を搬送波の位相変化量でフィルタリングするノイズ除去部とを有する。
(もっと読む)
イベント位置の決定
衛星測位システムからの信号を処理することにより、対象のイベントの位置を決定する方法は、衛星放送のデータサンプルのブロックを、周期的に記録するステップを備える。特定時刻での位置決定のリクエストに応じ、位置フィックスを取得する試みにおいて、データサンプルの直近のブロックが処理される。失敗した場合、方法は、さらに過去の時間にシーケンスで記録されたデータサンプルのブロックを処理し、位置フィックスが取得されるまで、位置フィックスを取得するためのさらなる試みを行うステップを、さらに備える。さらなる試みのために用いられるデータサンプルのブロックは、不規則に時間の間隔をあけられており、例えば、特定時刻に対して、相対的に古い時刻よりも、相対的に最近の時刻に、より密集して存在する。これは、位置フィックスを取得するための試みにおける処理リソースを、効率的に割り当てることを可能にし、これにより、電力消費を減少させる。 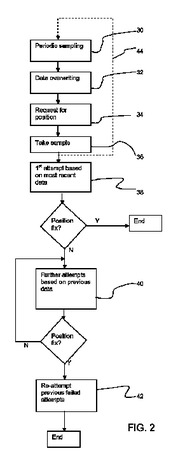 (もっと読む)
(もっと読む)
衛星位置決めシステム受信機を作動する方法および装置

【課題】衛星位置決めシステム受信機を作動する方法および装置
【解決手段】クライアント/サーバアーキテクチャにおいて衛星位置決めシステム(SPS)受信機を操作するための装置および方法。方法の1事例において、第1の時間に第1の複数の擬似距離が決定され、第1の時間の後の第2の時間に第2の複数の擬似距離が決定される。第1の複数の擬似距離および第2の複数の擬似距離は記憶される。第2の時間の後、第1の複数の擬似距離および第2の複数の擬似距離は、通常1つの送信でロケーションサーバに送信される。該ロケーションサーバはその後、該第1の複数の擬似距離から第1位置を決定し、該第2の複数の擬似距離から第2位置を決定する。1つの特定の例においては、該第1の複数の擬似距離および該第2の複数の擬似距離は、所定の種類の事象に応答して送信され、該ロケーションサーバは、時間にわたり収集されたディファレンシャルGPSデータの集合を記憶する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、指向性を有し、該指向性を異なる方向に向けて配置される複数のアンテナと、各アンテナにより受信された同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、該擬似距離計算部により求められた各擬似距離の差分を求める擬似距離差分計算部と、該擬似距離差分計算部により求められた差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、該判定部により、マルチパスの影響を受けていると判定された擬似距離に対する重み付けを変更し、測位演算を行う測位演算部とを有する。
(もっと読む)
複数アンテナ測位装置
【課題】受信信号の合成によって発生するアンテナゲインパターンのNullの発生を防止し、可視性の高い測位装置を得る。
【解決手段】飛しょう体に搭載された複数の受信アンテナからの受信信号を、各受信信号の信号強度により重み付けして平均した位相になるように、それぞれの相関値ベクトルの位相を回転させて一致させ、位相が揃えられたそれぞれの相関値ベクトルの合成を行い、合成された信号に基づき受信信号の追尾を行う。
(もっと読む)
送信機から受信された複数の信号について複数の一致検査を行なう方法
ここに開示の主題は、複数の全地球衛星航法システム(GNSS’)から受信された複数のナビゲーション信号成分を処理するためのシステムおよび方法に関する。特定の実施において、第1のナビゲーション信号成分におけるエネルギ検出は、第2のナビゲーション信号成分における情報に少なくとも部分的に基づいて分類される。 (もっと読む)
GNSS暦の自律的な受信機内予測方法及び装置
全地球航法衛星システム(GNSS)の軌道状態及びクロック状態の自律的な受信機内予測の方法及び装置を記載する。GNSS放送メッセージのみを使用し、周期的な外部通信情報を必要としない。地球方位情報をGNSS放送暦から抽出する。地球方位パラメータの正確な推定により、慣性基準フレーム内で、最適に適合するGNSS軌道を、時間内に前向きに伝播させることができる。次に、推定した地球方位パラメータを用いて、予測した軌道を地球中心−地球固定(ECEF)座標に変換して、信号の取得に当たりGNSS受信機を支援するために使用する。GNSS衛星のクロック状態も放送暦から抽出して、このデータに、パラメータ化したクロック動作のモデルを適合させる。次に、モデル化したクロックを推定し、時間的に前向きに伝播させて、予測した軌道と共に、より迅速なGNSS信号取得を可能にする。 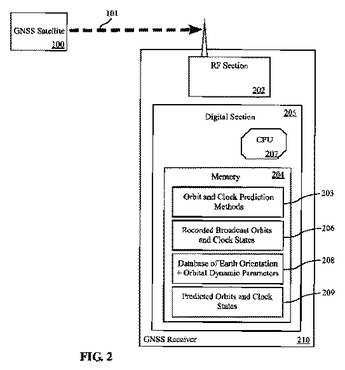 (もっと読む)
(もっと読む)
組み合わされたナビゲーション信号を処理するための方法
ここに開示される主題事項は、複数の全地球ナビゲーション衛星システム(GNSS)から受信される複数のナビゲーション信号成分を処理するためのシステム及び方法に関する。特定の実施形態において、第2ナビゲーション信号成分内の情報に少なくとも部分的に基づいて、第1ナビゲーション信号成分内のコード位相が検出されうる。  (もっと読む)
(もっと読む)
長期予測軌道データの信頼性判定方法、測位方法、測位装置及び測位システム
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、携帯型電話機4は、サーバシステム3から受信した長期予測エフェメリスデータを用いて、測位演算に必要な数以上のGPS衛星SVを組合せた複数の衛星組合せに基づいて測位演算を行う。そして、衛星組合せそれぞれに含まれるGPS衛星SVの異同と、衛星組合せそれぞれについて行った測位演算結果の差とに基づいて、長期予測エフェメリスデータに含まれる各GPS衛星SVそれぞれの予測軌道の信頼性を判定する。
(もっと読む)
パラメータ値算出方法、長期予測軌道データの提供方法、情報提供装置及び測位システム
【課題】長期予測エフェメリスを生成するための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、衛星軌道の所定の有効期間を区分する予測対象期間の長さを、将来になるほど長くなるように可変に設定する。より具体的には、外部システム2から取得した衛星精密暦に含まれる過去の予測位置に対応するGPS衛星SVの実績位置と、外部システム2から取得した衛星予測暦に含まれる過去の予測位置との差で表される予測誤差が大きいほど、予測対象期間の長さを長く設定する。そして、設定した複数の予測対象期間それぞれについて、衛星予測暦に基づいて、ケプラーの楕円軌道モデルに従ったGPS衛星SVの予測軌道を求め、衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を予測対象期間毎に纏めた長期予測エフェメリスデータを生成して、携帯型電話機4に提供する。
(もっと読む)
GPS搭載携帯端末及びGPS信号復調方法
【課題】本発明は、GPS信号に対する同期獲得を高速で実行し消費電力を低減するようにする。
【解決手段】本発明は、GPSの衛星から送信されるGPS信号S1と同期したCDMAセルラーシステムの基地局からのスペクトラム拡散信号S10を受信し、当該スペクトラム拡散信号S10に基づいてGPS信号S1の同期を獲得するために用いるリファレンス信号としてのシステムタイム信号S17を生成し、GPS信号S1を受信しシステムタイム信号S17に基づいてGPS信号S1におけるPNコードとの同期を獲得するようにしたことにより、GPS信号S1におけるPNコードとの同期獲得をシステムタイム信号S17に合わせて短時間で実行し得るので消費電力を一段と低減することができる。
(もっと読む)
GNSS受信装置および測位装置
【課題】BOC信号を用いた場合にコード初期値が取り得るコード位相差値の範囲を広くすることができるGNSS受信装置を実現する。
【解決手段】コード位相差検出部250は、E相関値とL相関値との和からE+L相関値を算出する。コード位相差検出部250は、E+L相関値に定数Kを乗算してP相関値に加算することで相関係数を設定する。コード位相差検出部250は、設定した相関係数を、E相関値とL相関値との差分からなるE−L相関値に乗算することで、ドットプロダクト演算値を算出する。この際、E相関値の元となるEarlyコード信号およびL相関値の元となるLateコード信号を決める位相差τ2、および定数Kは、P相関特性の負値領域をE相関値およびL相関値の正値領域で補正して正値方向へ拡張するような値に設定される。
(もっと読む)
衛星ナビゲーションシステムにおけるナビゲーションシステム時間の算出
【課題】従来のナビゲーションビット境界を判定するプロセスは、時間がかかる可能性があり、TTFFが増加する可能性があった。
【解決手段】カウンタと制御ユニットとを備える衛星ナビゲーションシステム受信器が記載されている。カウンタは、基準クロック周波数を有する基準クロック信号によって駆動され得る。制御ユニットは、ある時間の間のカウンタ値の増加を、この時間の間のナビゲーションシステム時間の増加と比較することによって、補正された基準クロック周波数を表す補正値を算出することができる。制御ユニットは、補正値に従って算出ナビゲーションシステム時間を生成することができる。
(もっと読む)
相互相関スプール緩和のための装置および方法
複数のピーク測定値から、ペアを形成するために、第1のキャリア対ノイズ密度推定値を有する第1のピーク測定値と第1のドップラーオフセット測定値および第2のキャリア対ノイズ密度を有する第2のピーク測定値と第2のドップラーオフセット測定値を選択することと、第1のキャリア対ノイズ密度推定値および第2のキャリア対ノイズ推定値に基づいてキャリア対ノイズ密度差を計算することと、第1のドップラーオフセット測定値および第2のドップラーオフセット測定値に基づいてドップラー差を計算することと、キャリア対ノイズ密度差をキャリア対ノイズ密度しきい値と比較することと、ドップラー差を少なくとも1つのドップラーしきい値と比較することと、を備える相互相関スプール緩和のための装置および方法。 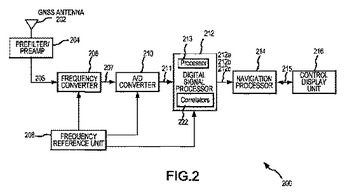 (もっと読む)
(もっと読む)
測位信号追尾処理装置および測位装置
【課題】C/Noによるコード追尾結果やキャリア周波数追尾結果への影響を抑制し、高精度なコード、キャリア周波数追尾ができる簡素な構成の測位信号復調装置を実現する。
【解決手段】測位信号のサーチに成功すると、復調部13は、まずコード追尾部33のみを動作して、コード追尾部のみを行い、コードの合わせ込みを行う。この際、C/No測定部36は、相関処理後の逆拡散信号のC/Noを逐次測定し、追尾処理制御部37へ与える。追尾処理制御部37は、逐次入力されるC/Noに基づいてコード追尾のみの状態からコード追尾とキャリア追尾とを並行して行う状態への切替タイミングを決定する。切替タイミングに達すると、コード追尾部33とキャリア追尾部34とを連結し、コードとキャリア周波数の同時追尾を行う。この際、キャリア追尾部34のキャリア周波数の初期値は、コード追尾部33により積算されたコードドップラの積算値が与えられる。
(もっと読む)
GPS信号発生装置及び中継システム
【課題】端末の構成や動作に変更を加えることなく、屋内等のGPS衛星からの電波が受信しにくい環境にあっても精度良く位置検出可能にする。
【解決手段】GPS衛星からのGPS信号を受信するGPS信号受信部11と、自装置の位置に関する特定地点の位置情報を保持する位置情報記憶部15と、受信したGPS信号の送信タイミングを位置情報に基づいて調整し、GPS信号と同じ情報及び信号形式を持つ擬似GPS信号を生成する擬似GPS信号生成部18とを備える。擬似GPS信号生成部18は、航法メッセージタイミング生成部17で自装置の位置情報と受信GPS信号の航法メッセージに基づき生成されるタイミングにより、擬似GPS信号の送信タイミングを決定し、受信GPS信号と同等の内容でタイミングが調整された擬似GPS信号を生成する。
(もっと読む)
ワイヤレス・デバイス上で発生したイベントにサービス品質を有するロケーション・フィックスを関連付けるための装置および方法
ワイヤレス通信ネットワーク中で通信しているワイヤレス・デバイスの動作に関連するイベントに対応する地理的位置を推定するための装置および方法。イベントの発生と、それぞれイベントの前および後に測定される第1のロケーション・フィックスおよび第2のロケーション・フィックスのうちの少なくとも1つのワイヤレス・デバイスの関連する時間および速度との間の時間および距離を分析する。得られるフィックスが地上ワイヤレス通信測定に少なくとも部分的に基づくように調整されたサービス品質(QoS)を有する第1および第2のロケーション・フィックス。これらの分析は、地理的位置を検証し、いくつかの例では、イベントに関連付けるべき好適な地理的位置を判断するために、それらのメトリクスを所定の時間しきい値と比較することを含む。 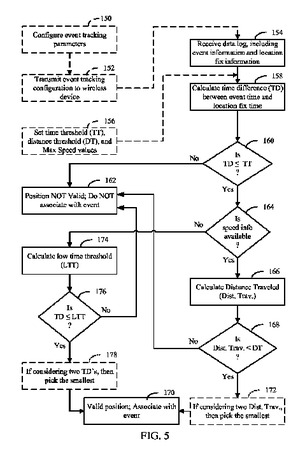 (もっと読む)
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
無線通信ネットワークにおいて様々な衛星測位システムに関連する符号位相関連情報を要求/提供するための方法及び装置
様々な衛星測位システム(SPS)に関連する符号位相関連情報信号を要求及び/又は提供するために無線通信ネットワーク内の1又は複数のデバイスによって使用されることがある方法及び装置を提供する。 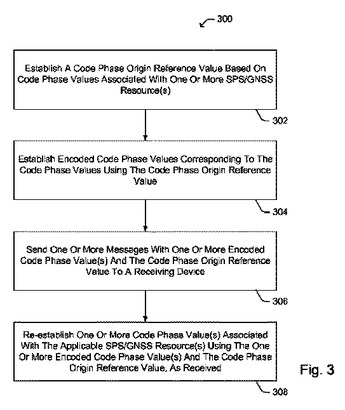 (もっと読む)
(もっと読む)
測位方法、プログラム及び測位装置
【課題】測位率や測位結果の正確性の向上を可能ならしめること。
【解決手段】第1の高分解能相関積算処理を開始してから第3の閾値時間が経過した時刻
「T3」において、第2の高分解能相関積算処理を開始する。そして、第1の高分解能相
関積算処理を開始してから第2の閾値時間(>第3の閾値時間)が経過した時刻「T4」
において、当該第1の高分解能相関積算処理の処理結果から得られる擬似距離用コード位
相を用いて測位演算を行うとともに、第1の高分解能相関積算処理を再び最初から開始す
る。また、第2の高分解能相関積算処理を開始してから第2の閾値時間が経過した時刻「
T5」において、当該第2の高分解能相関積算処理の処理結果から得られる擬似距離用コ
ード位相を用いて測位演算を行うとともに、第2の高分解能相関積算処理を再び最初から
開始する。
(もっと読む)
161 - 180 / 377
[ Back to top ]