
Fターム[5J062DD21]の内容
Fターム[5J062DD21]の下位に属するFターム
Fターム[5J062DD21]に分類される特許
41 - 60 / 405
SUPLプラットフォームを応用した小型基地局の測位方法及びそのシステム
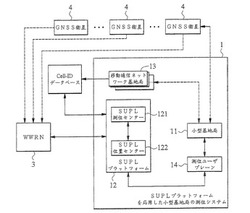
【課題】従来のフェムトセル基地局の初期位置算出時間が長くなりすぎたり、受信信号の不良により、測位不能となったりする問題点を解決するSUPLプラットフォームを応用した小型基地局の測位方法及びそのシステムを提供する。
【解決手段】SUPLプラットフォームを応用した小型基地局の測位システム1は、複数の移動通信ネットワーク基地局13、SUPLプラットフォーム12、測位ユーザプレーン14及び小型基地局11を備える。SUPLプラットフォーム12には、複数の移動通信ネットワーク基地局13の位置情報を取得するために用いるSUPL位置センター122と、通信を構築するために用いるSUPL測位センター121とが配置される。測位ユーザプレーン14は、SUPLプラットフォーム12に接続される。小型基地局11には、SUPLプラットフォーム12と通信を構築するために用いるSUPLプログラムが設けられる。
(もっと読む)
測位装置、測位装置の調整方法およびプログラム

【課題】 較正処理の実行時期を判断するためだけに多大な負荷を要することなく、自律航法の測位に必要な較正処理を適切な時期に行うことのできる測位装置、測位装置の調整方法およびプログラムを提供する。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
(もっと読む)
測位システム、測位方法、及び測位プログラム
【課題】第2の測位方式による測位結果の実測値をもとに、第1の測位方式による測定位置における第2の測位方式による測位の可否を判定する測位システムにおいて、第2の測位方式による測位が不可と推定されたことにより、その測定位置での第2の測位方式による測位が行われないままになることを防止する。
【解決手段】測位制御部210は、第1の測位方式による測位で取得された測位要否判定対象である測定位置と測位情報記憶部220に記憶された測位情報とをもとに、第2の測位方式による測位が成功する確率と当該確率の推定精度とを算出し、第2の測位方式による測位が成功する確率の推定精度が所定の精度以下の場合、第2の測位方式による測位を行い、当該測位要否判定対象である測定位置と当該第2の測位方式による測位可否とを設定した測位情報を測位情報記憶部220に保存する。
(もっと読む)
衛星測位システム及び測位信号受信機
【課題】衛星測位システムから送信される測位信号による位置決定において、高速に位置を決定する測位信号受信機及び衛星測位システムを提供する。
【解決手段】全地球測位システムと、測位信号受信装置と、低頻度に供給されるアシスト情報としての衛星軌道情報を提供する低頻度アシスト情報提供システムと、クロック情報を生成するクロック情報生成装置と、前記クロック情報を前記測位信号受信装置へ送信するQZSとからなる衛星測位システムであって、前記クロック情報生成装置は、前記QZSのL1−SAIF信号にクロック情報を重畳し、前記QZSを介して前記測位信号受信装置へ送信し、前記測位信号受信装置は、前記GPSと前記測位信号受信装置102との間の計測距離値と、前記衛星軌道情報と、前記クロック情報とを用いて前記測位信号受信装置の位置を決定することを特徴とする。
(もっと読む)
測位情報配信システム、受信装置及び測位情報配信方法
【課題】双曲線航法にて測位するシステムにおいて、基地局側が互いに精密に同期した時計を必要とすることのないシステムを提供する。
【解決手段】基地局S0が周波数f0の測位電波f0を発信し、第1中継基地局S1は測位電波f0を受信して測位電波f1を再送信し、第2中継基地局S2は測位電波f0を受信して測位電波f2を発信する。受信装置Pは測位電波f0、f1、f2を受信して各受信時刻T0、T1’、T2’を記録する。基地局S0は測位電波f0発信〜測位電波f1受信までの期間ΔTd1、測位電波f0発信〜測位電波f2受信までの期間ΔTd2を算出し、また期間ΔTs1、期間ΔTs2を算出し(ΔTs1=ΔTd1−d01/c、ΔTs2=ΔTd2−d02/c、d01:S0〜S1距離、d02:S0〜S2距離、c:光速)、期間ΔTs1、期間ΔTs2、第1中継基地局S1座標、第2中継基地局S2座標を含む測位情報を配信する。
(もっと読む)
データベース管理装置及びデータベース管理方法
【課題】移動可能な装置からの信号の利用を抑制して、通信端末による高い精度の測位を実現する。
【解決手段】測位支援システム10を構成するSUPLサーバ20の測位用DB23に格納され、アクセスポイントE1,E2が設けられた通信エリアを示す設置エリア情報と、アクセスポイントトE1,E2から発信された電波を受信した通信端末60の位置を示す通信エリア情報を含んで通信端末60から発信される複数の電波情報と、に基づいて、SUPLサーバ20の制御部22において、アクセスポイントトE1,E2が移動しているか否かが判断される。このため、アクセスポイントトE1,E2が移動している場合には、このアクセスポイントからの信号の使用を抑制することができる。したがって、移動可能なアクセスポイントからの電波を用いることなく通信端末60による高い精度の測位を実現することができる。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【課題】移動局ユニットの位置決めの精度を改善する。
【解決手段】無線通信システムでは、移動局ユニットの位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。
(もっと読む)
携帯端末及び制御方法
【課題】GPS測位の方式を適切に決定し、消費電力を低減できる携帯端末及び制御方法を提供すること。
【解決手段】携帯電話機1は、複数の測位方式のうち選択された一の測位方式により、現在の位置に関する位置情報を取得する測位部32と、複数の地域と前記複数の測位方式とを対応付けた特定情報を記憶する記憶部70と、測位部32により取得された位置情報に基づく現在の位置が、特定情報に基づく前記複数の地域のいずれに該当するかを判定し、判定結果に応じて、複数の測位方式のうち所定の一の測位方式を選択する方式選択部33と、を備える。
(もっと読む)
観測装置、観測方法およびプログラム
【課題】全地球測位システムにおける衛星からの電波を受信して位置を特定する際の電力消費を抑制する技術を提供する。
【解決手段】GPS衛星からの送信信号を復調する復調部19に、レプリカ信号生成回路192、相関処理部193、レシーバプロセッサ194、および、ナビゲーションプロセッサ195を設ける。レシーバプロセッサ194による衛星の追尾が行われているときの制御パラメータを制御データ122として退避した後、復調部19に対する電力の供給を停止させて、復調部19における電力消費を抑制する。復調部19に対する電力の供給を再開させるときには、衛星の追尾に成功していたときの制御パラメータ(制御データ122)を読み出して、当該読み出した制御パラメータによって衛星の再捕捉を再開する。
(もっと読む)
測位支援装置及び測位支援方法
【課題】通信端末に対して高い精度の概位置情報を送信する。
【解決手段】SUPLサーバ20において、通信端末60から送信される測位結果情報を受信し、この測位結果情報に基づいて、概位置情報DB23において、セルIDに対応付けて格納される概位置情報が更新される。このとき、セルの基準位置を示す基地局の概位置情報と、このセルを含む複数のセルを包含する上位エリアの誤差半径とが通信端末60から送信される測位結果情報に基づいて更新されるため、通信端末60が在圏するセルが上位エリアの基準位置と誤算半径とで規定される領域から外れることを防止できる。したがって、上位エリアに係る情報の精度を高めることができ、通信端末60に対してより高い精度の概位置情報を送信することができる。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えつつ、目的地に近づくと正確に測位を行えるようにする。
【解決手段】携帯端末は、第1測位部で測位し、現在位置から目的地までの距離が第1測位部の誤差の距離を超えている場合には、現在位置から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。携帯端末は、現在位置から目的地までの距離が第1測位部の誤差の距離未満である場合には、第2測位部に電力を供給して第2測位部で測位を行う。携帯端末は、第2測位部で測位した後、目的地に到達しているか否か判定し、目的地に到達している場合には、目的地に到達したことをユーザーに報知する。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できるようにする。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
(もっと読む)
現在位置表示装置
【課題】GPS衛星信号に基づいて現在位置を算出するのに必要な演算時間と、現在位置表示装置の加減速状態とを考慮して、現在位置をより適正な位置に表示する。
【解決手段】過去の複数のGPS測位位置における現在位置表示装置の速度変化率を取得する速度変化率取得手段と、過去の複数のGPS測位位置に対する各重み付け係数を記憶する重み付け係数記憶手段と、過去の複数の速度変化率と対応する各重み付け係数とに基づき、最新の前記GPS測位位置における現在位置表示装置の速度変化率を予測速度変化率として算出する予測速度変化率算出手段と、最新のGPS測位位置と予測速度変化率とに基づき、GPS受信機によるGPS測位位置の出力時における現在位置表示装置の位置を推定位置として算出し、地図上の前記推定位置に現在位置マークを表示させる表示制御手段と、を備える。
(もっと読む)
タイミングオフセットを有する送信機を用いた位置特定
【課題】GPS技術に代わって(またはともに)ワイヤレスネットワーク中で位置または場所情報を決定するシステムおよび方法において、より正確に距離測定を行う。
【解決手段】タイミングオフセット情報が、複数の送信機と1つの受信機との間で通信される。このような情報によって、ネットワーク全体にわたったタイミング差に対処するように正確な位置または場所の決定を行うことができる。別の実施形態では、受信機における潜在的なタイミング差に対処するために、送信機からの送信を前進または遅延させる送信機位相調整を行う。さらに別の観点では、位置場所決定を容易にするために、タイミングオフセット通信および/または送信機位相調整の組み合わせをワイヤレスネットワークにおいて使用する。
(もっと読む)
列車位置検出装置
【課題】簡単な構成で列車の走行位置を車上で高精度に検出する。
【解決手段】速度発電機3からの信号によるTG位置とGPS受信機4からのGPS位置を比較して列車の位置を検出するとともに、検出した列車の位置を、加速度センサ5から出力する列車の上下振動信号と集音装置6から出力する音響信号の両方の波形特徴を抽出して車上装置2がレール継ぎ目や分岐部等の特異点を通過したときの特異点通過信号により補正して、GPS受信機4の測位精度が変化した場合、あるいは速度発電機3からの信号が車輪の空転や滑走などにより不正確になっても列車位置を補正して高精度に列車位置を検出する。
(もっと読む)
測位装置及び測位方法
【課題】無線LAN を利用して位置測位を行う際に、チャネルのサーチ時間を短縮し、且つ該チャネルのサーチにより消費される電力を低減すること。
【解決手段】アクセスポイントとの間の距離に基づいて、測位演算を行う測位装置は、アクセスポイントを検出するアクセスポイント検出部と、該検出されたアクセスポイントを、チャネル毎に記憶する記憶部と、記憶されたアクセスポイントに基づいて、スキャンすべきチャネルを設定するチャネル設定部と、検出されたアクセスポイントとの間の距離に基づいて測位を行う測位演算部とを有する。アクセスポイント検出部は、チャネル設定部により設定されたチャネルに基づいて、アクセスポイントを検出する。
(もっと読む)
携帯端末
【課題】A−GPSでの携帯端末に比べて構成要素をそれ程増やすことなく、Standaloneでの初回測位と2回目以降測位とを切替え、GPS以外の機能も並行に実行可能な携帯端末を提供する。
【解決手段】携帯端末の制御部20は、StandaloneでのGPSを開始すると、まず、GPS優先モードに入る(ステップS10)。そこでは、Standaloneでの比較的ノイズに弱い初回測位の成功を優先させるために、GPS以外の機能でEMIノイズを発生する機能を数分間停止させるEMI遮断処理(S12)とGPSアンテナダイバーシティ受信処理(S13)を行わせる。初回測位に成功すると、通常モード(S20)に入り、比較的ノイズに強い2回目以降測位に備えて、EMI遮断処理を通常モードに戻し(S21)、GPSアンテナを通常モードに戻し(S22)、GPS以外の機能が並行に実行できる。
(もっと読む)
可搬型携帯端末、可搬型携帯端末の測位プログラム及び測位システム
【課題】位置検出精度を維持しつつ省電力化を図る。
【解決手段】絶対位置取得部32が、少なくとも端末本体40を保持するユーザが進行方向を変え得る位置、すなわち曲がり角又は通路が交差する位置に配置された複数のIMESビーコン装置300のいずれかから、当該ビーコン装置の絶対位置情報を取得する。また、制御部34は、端末本体の進行方向が変更されたことを、曲がり検出部30が検出したタイミングに基づいて、絶対位置取得部による絶対位置情報の取得を開始する。これにより、ユーザが進行方向を変えたタイミングで、IMESビーコン装置から絶対位置情報を取得することができるので、移動軌跡を生成するのに必要十分な絶対位置情報の取得ができる。また、絶対位置取得部は、少なくとも曲がり検出部が曲がりを検出したタイミングごとに間欠的に起動すれば良いので、省電力化を図ることができる。
(もっと読む)
41 - 60 / 405
[ Back to top ]