
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
201 - 220 / 843
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
補正データ送信装置、補正データ送信方法、補正データ送信プログラム、測位装置、測位方法および測位プログラム

【課題】センチメートル級の測位精度を維持したままで、基準点から観測点へ配信する補正データの伝送量を削減することを目的とする。
【解決手段】補正データ送信装置200は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値とを計算する。さらに、補正データ送信装置200は、上記複数の基準点のそれぞれに固有な誤差量を示す基準点固有誤差を計算する。そして、補正データ送信装置200は、計算した擬似距離に関する値と搬送波位相に関する値と基準点固有誤差とを、補正データ201として測位装置300へ配信する。測位装置300は、補正データ送信装置200から配信された補正データ201と、観測点で受信した観測データとを用いて、移動体120の位置を算出する。
(もっと読む)
無線端末における位置推定方法、無線端末及び位置推定プログラム
【課題】測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供する。
【解決手段】複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、無線端末は、自無線端末の位置情報と位置情報の精度を高い順に規定したレベルとを保持し、通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から他無線端末までの推定距離を算出し、その推定距離に基づいて推定位置情報を算出する第3のステップとを有する。
(もっと読む)
移動体位置測位装置
【課題】より確実且つ高精度に移動体の位置を測位すること。
【解決手段】複数の衛星からの信号を受信する受信手段と、該受信手段により受信された信号に基づき観測疑似距離を算出する観測疑似距離算出手段と、該観測疑似距離算出手段により算出された観測疑似距離に基づき、繰り返し測位演算を行なう測位演算手段と、を備える移動体位置測位装置であって、前記測位演算手段が繰り返し測位演算を行なう中で前回に測位された測位結果と衛星位置から求められる距離に、ADR(Accumulated Doppler Range)の変化量を加算して推定疑似距離を算出する推定疑似距離算出手段を備え、前記測位演算手段は、所定の場合に、前記観測疑似距離算出手段により算出された観測疑似距離に代えて前記推定疑似距離算出手段が算出した推定疑似距離を用いて測位演算を行なうことを特徴とする、移動体位置測位装置。
(もっと読む)
波数推定装置及び測位装置及び波数推定方法
【課題】推定した整数波数の妥当性を、簡便かつ有効に判定し、整数波数及び受信機位置の推定の信頼性を高める。
【解決手段】推定状態判定部130は、観測量取得部が取得した観測量の数(観測量衛星数)と、実数波数推定部(波数位置推定部110)が推定した実数波数の数(実数波数衛星数)と、整数波数推定部(波数位置推定部110)が推定した整数波数の数とに基づいて、複数の判定基準に基づいて、上記実数波数推定部(波数位置推定部110)が推定した実数波数が正しいか否かを判定する。実数波数推定部(波数位置推定部110)は、次回の推定において、推定状態判定部130が判定した結果に基づいて、実数波数を推定する。
(もっと読む)
TECマップ及び受信機バイアスの作成及び測定方法及び装置
【課題】少ない演算量及びメモリ量で高精度に、TECマップの作成と受信機バイアスの測定を共に得る。
【解決手段】測位用衛星受信機の受信機バイアス、および、測位用衛星の衛星バイアスを予め測定または入手する。測位用衛星と測位用衛星受信機とのパスからピアスポイントを算出し、そのピアスポイントが、予め区分けしたどのブロックに属するかを判定する。測位用衛星受信機から出力される搬送波位相及び疑似距離を用いて、衛星及び受信機バイアスを含んだ見かけの視線方向の電離層全電子数(STEC)を算出し、そのSTECから衛星バイアス及び受信機バイアスを減算し、測位用衛星受信機と測位用衛星との位置関係から真の鉛直方向の電離層全電子数(VTEC)を算出する。各ピアスポイントにおけるVTECを、各ピアスポイントの属するブロック毎に平均して求めた値を、ブロックVTECとする。各ブロックVTECによりTECマップを作成する。
(もっと読む)
各種の制御不可能な系統効果により干渉を受ける時間変化信号値の予測誤差を修正する方法
本発明は、時間変化信号の値、特に、全地球航法衛星システムから送られた航法メッセージの予測値を修正する方法に関し、受信した信号に含まれていて時間変化するパラメータの予測値を修正する以下のステップ、すなわち
−所定の時間にわたり推定された第1の値のバッチに基づいて、これらの値を同一の所定時間にわたり先に予測された値と比較することにより、予測誤差を推定するステップと、
−前記信号を処理して、前記系統効果の寄与分を分離する方法により、予測された時系列的な一連の予測誤差を解析するステップと、
−対象とする期間にわたる前記系統効果の寄与分の挙動を外挿すると共に、正しく外挿された値を用いて予測値を修正するステップとを含むことを特徴とする。 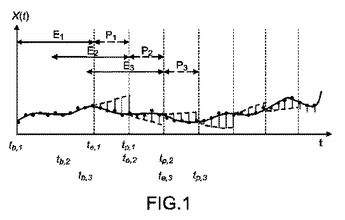 (もっと読む)
(もっと読む)
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
(もっと読む)
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの位置を時系列に予測した衛星予測暦に含まれる各予測位置を、測位用衛星の実際の位置を時系列に記憶した衛星精密暦に含まれる実績位置と比較することで、衛星予測暦に含まれる予測位置の正確性の変化を分析する。そして、連続する複数の予測対象期間それぞれにおける予測衛星軌道の衛星軌道パラメータの値を纏めてなる長期予測エフェメリスの予測対象期間それぞれの信頼性を、分析の結果に基づいて判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
(もっと読む)
揺動構造物の動きを判定するシステム
レシーバを固定的に取り付けた揺動構造物の動きを判定するシステムを提案する。位置を把握及び固定した少なくとも3つの基準トランスミッタを設け、これらの基準トランスミッタはレシーバが受信する送信信号を規定のキャリア周波数で送信する。システムは評価装置をさらに備えるが、この評価装置は規定キャリア周波数を考慮しつつ、受信信号から測定位相値を判定する。基準トランスミッタからの距離と、レシーバの位置の変化、即ち揺動構造物の位置の変化を、前記位相値から計算することができる。 (もっと読む)
測位装置
【課題】高精度GPS受信機において自装置位置を測位演算する場合に、擬似距離1msec.以下の項だけで自装置位置を正確に求めることができる測位装置を実現する。
【解決手段】測位装置10の初期値算出部141は、ドップラー周波数を用いて、自装置位置を未知数とする航法方程式をたて、それを最小自乗法で解く。そして、初期値算出部141は、その解を真位置推定部142に与える。測位装置10の真位置推定部142は、この初期値を用いて擬似距離の1msec.以下の項による観測方程式を設定し、当該観測方程式から測位装置10の高精度な位置を推定演算する。
(もっと読む)
移動局測位システム、移動局測位システムに適用可能な移動局および基地局
【課題】移動局の送信電力を制御することができるとともに、測位信号の送信電力が一定でない場合においても移動局の測位を精度よく行なうことができる移動局測位システムを提供する。
【解決手段】測定された準備信号の受信電力に基づいて送信電力決定部により測位信号の送信電力が決定され、移動局の測位信号送信部により測位信号が決定された送信電力により送信されるので、準備信号の受信電力の大きさに基づいて測位信号の送信電力を制御することができる。また、送信された測位信号が、基地局の測位信号受信部により受信されるとともにその受信電力が測定され、測位部により、複数の基地局から複数の基地局対が選択され、選択された該基地局対を構成する2つの基地局の測位信号受信部においてそれぞれ測定される測位信号の受信電力の比に基づいて移動局の位置が算出される。
(もっと読む)
受信強度測定方法、受信器、および移動局測位システム
【課題】電波の干渉が受信強度に及ぼす変動の影響を低減して受信強度を測定することのできる受信強度測定方法、および受信強度測定方法を利用した受信機、移動局測位システムを提供する。
【解決手段】測定条件設定部46(SA7)により、電波を受信するための複数の異なる測定条件が設定され、設定された測定条件のそれぞれについて、受信強度計測部52(受信強度検出部38、分布生成部40、SA7、SA8)により、電波の受信強度の値が所定の受信時間区間において所定の計測間隔毎に計測されるとともに、受信強度の値に対する計測頻度の分布が算出される。受信強度演算部54(変動除去部42、補正受信強度演算部44、SA9、SA10)により、受信強度計測部54により算出される該受信強度の値に対する計測頻度の分布を所定の演算方法により演算して受信する電波の補正受信強度が算出される。
(もっと読む)
位置検出装置、位置検出システム、位置検出方法およびプログラム
【課題】移動体に測位データを送信する手段を設けることなく、移動体の外部でその位置を精度よく検出する。
【解決手段】無線タグ3から電波で送信される固有のデータを含む信号を受信して、その電波の到来方向を検出する2以上の測位器2から、受信した信号とその到来方向を含むタグ情報31を、ネットワークを介して受信する受信部11と、受信部11で測位器2から受信したタグ情報31ごとに、その到来方向と測位器2の位置の情報から算出される、無線タグ3の位置データ33を取得する位置データ算出部12と、同じ固有のデータを含むタグ情報31について、直近の所定の時間に受信したタグ情報31から算出される位置データ33を、そのタグ情報31を検出した測位器2からそのタグ情報31の位置データ33で表される位置までの距離に応じた係数で重み付けした加重平均を計算して、無線タグ3の位置を算出する位置算出部13と、を備える。
(もっと読む)
GPS装置およびその測位方法
【課題】インフラであるDGPS基準局やDGPS信号の受信機構を受信機に搭載していなくても、誤差要因の解消を実現させることができるGPS装置およびその測位方法を提供。
【解決手段】GPSモジュール10置は、センサ処理部12で所定の時間あたりに端末装置の携帯者の加速度およびこの携帯者が進行する方位を取得し、情報処理し、受信処理部16でGPS衛星からのGPS信号48を受信し、受信したGPS信号48に含まれる情報を基に位置情報を取得して、所定の時間にわたって取得した位置情報を保持し、演算部14で取得した携帯者の加速度28および方位30から所定の時間あたりに3次元における軸それぞれの方向成分を用いて、端末装置の移動距離を演算し、演算した移動距離とGPS衛星から取得した位置情報とを用いて、擬似距離の誤差を解消して、GPS衛星の位置情報を補正する。
(もっと読む)
移動局測位システム
【課題】精度のよい測位を実行可能な移動局測位システムを提供する。
【解決手段】方角検出部28により移動局10の方角が検出され、移動局10もしくは複数の基地局12のうち一方から送信された電波を受信した他方における受信強度のそれぞれと、移動局10における相対的な方角ごとの受信強度と電波の伝搬距離についての予め得られ指向性強度情報記憶部48に記憶された関係である指向性強度情報と、方角検出部28によって検出された移動局10の方角とに基づいて、測位部52により移動局10の位置が算出されるので、移動局10からの方向によって電波の伝搬距離と減衰の程度がばらつく場合であっても、移動局10の位置の算出を精度よく行なうことができる。
(もっと読む)
移動局測位システム
【課題】基地局の時計に時間ずれやクロック速度の差が存在し、機器に固有の送信遅延時間および受信遅延時間が存在する場合においても、移動局の位置の算出を精度よく実行できる移動局測位システムを提供する。
【解決手段】各普通基地局12と基準基地局11とのクロック速度比と、各普通基地局12の時計と基準基地局11の時計との時計ずれと、基準基地局11における送信遅延時間および受信遅延時間とに基づいて測位信号の受信時刻を基準基地局11の有する時計に基づいた時刻に補正する受信時刻補正部(66、68、70)と、補正された受信時刻と、基準基地局11における測位信号の受信時刻と、普通基地局12および基準基地局11の位置情報とに基づいて移動局の位置を算出する測位部72とを含み、移動局10および基準基地局11は、移動局10による測位信号の送信と基準基地局による時計合わせ信号の送信との一方に応答して他方を実行する。
(もっと読む)
移動局測位システム
【課題】電波の周波数と基地局とを選択することにより精度の高い測位を行なうことのできる移動局測位システムを提供する。
【解決手段】移動局10の移動局無線部22より、拡散符号を含む電波が複数種類の周波数により送信され、基地局12においては受信された電波とレプリカ符号との規格化相関値が相関値算出部39(SA2など)により算出される。測位周波数設定部58(SA4)により、各周波数について算出された規格化相関値のうちN−1番目に大きい値が比較され、その大きさが最大となる周波数が測位周波数として設定され、測位基地局選択部60(SA5)により、測位周波数において各基地局12で算出される規格化相関値の値が大きい順にN−1局の基地局を含むように測位基地局12が選択される。測位部66は、選択された測位基地局12と移動局10との間で測位周波数の電波の送受信を行った受信結果に基づいて移動局10の測位を行なう。
(もっと読む)
測位システム
【課題】複数の基地局12の位置が分からない場合や、基地局12どうしの時計の未知の時間ずれがある場合であっても、移動局10の位置を精度よく算出できる移動局測位システムを提供する。
【解決手段】測位部62により、位置情報が既知であり、複数の基地局12との間で電波の送受信が可能な複数の基準局11の位置情報と、複数の基準局11と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻に基づいて複数の基地局12の有する時計40の時間ずれおよび位置が算出され、さらに測位部62により、算出された複数の基地局12の有する時計40の時間ずれ情報および位置情報と、移動局10と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻とに基づいて移動局10の位置が算出される。
(もっと読む)
GNSS衛星による位置測定方法と装置
【課題】位置計算を航行メッセージの読み取りなしで、そして、ネットワークからのアシスト情報もなしで計算可能とする。
【解決手段】位置計算はコードと周波数の観測値とメモリーに保存される予測エフェメリスデータを利用して行われる。コードと周波数の観測値と予測値の差にもとづいて計算された損失関数が位置計算に使われる。位置計算は全地球衛星航法システム信号の1コード周期の利用で可能である。位置計算装置はフロントエンドと航行ユニットから構成される。フロントエンドユニットと航行ユニットは分離されている。デジタル化された中間周波数データはフロントエンド・ユニットから航行ユニットへ直接かデータ・リンク経由で通信可能であり、後の利用のためにメモリーに保存することも可能である。
(もっと読む)
201 - 220 / 843
[ Back to top ]