
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
221 - 240 / 843
無線通信システム、及び移動局、並びに基地局
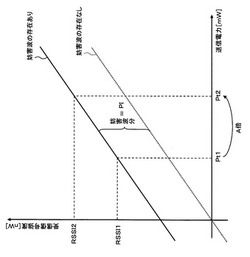
【課題】妨害波が存在する電波環境であっても、移動局からの電波信号の真の受信信号強度値を基地局で検出する。
【解決手段】移動局10と、複数の基地局12A〜Dとを有し、移動局10は、互いに所定の出力比となる複数の出力値を含む電波信号を送信し、各基地局12A〜Dは、受信された電波信号に基づき、複数の出力値にそれぞれ対応した複数の受信信号強度値を検出するRSSI部47を備える無線通信システム8であって、上記出力比と、上記複数の受信信号強度値とに基づき、各基地局ごとに妨害波の受信信号強度を算出し、算出した妨害波の受信信号強度と、所定のしきい値とを比較する。
(もっと読む)
ワイドレーンの組み合わせを使用する無線ナビゲーション信号の処理

【課題】GNSS受信機の助けにより、測位解の精度を高めることができるよう、無線ナビゲーション信号を処理すること
【解決手段】
少なくとも2つの異なる周波数で無線ナビゲーション信号を一斉送信する衛星からの無線ナビゲーション信号を処理するための方法は、
各衛星から前記信号を受信するステップと、
各衛星に対し、コードおよび位相の非微分測定を実現するステップ(10)と、
基準システムから受信した前記衛星に関連するワイドレーンのバイアスを使用することにより、前記衛星のグループでコヒーレントな態様で前記ワイドレーンなアンビギュイティを決定するステップ(12、13、14)と、
コードおよび位相測定値および前記コヒーレントなワイドレーンのアンビギュイティの測定値を助けにして、前記受信機の全地球測位をするステップ(16、18)とを備える。全地球測位ステップは、それぞれの衛生に対して前記ワイドレーンのアンビギュイティを補償した、コードの測定値と前記位相測定値の差の電離層のない状態での組み合わせにより、疑似的距離を決定するステップ(16)を備え、前記電離層のない状態での組み合わせは、ノイズに関して最適化される。疑似的距離は前記基準システムからの電離層のない状態での組み合わせに関連する衛星のクロック値を受信することによって決定される。
(もっと読む)
加速度計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の加速度を求めることができる加速度計測装置を提供する。
【解決手段】加速度計算部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の加速度成分を算出する。続いて、加速度計算部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の加速度成分の不定値を算出する。続いて、加速度計算部3は、搬送波位相の加速度成分に不定値を加算することによって、不定性を解消した搬送波位相の加速度成分を算出し、それと方向余弦とに基づいて、受信点の加速度を算出する。
(もっと読む)
時間基準システム
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムは、複数の衛星から符号変調信号を受信し、かつ、ダウン・コンバートする衛星信号受信機と、各衛星の不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートされた信号をトラッキング及び復号化する相関器とを有する。システムのデータ処理部は、外部情報源から補助データを受信し、受信した衛星信号が搬送する低周波データ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、凡その時間基準を提供するために、予備的な位置−速度−時間の解を実行し、時間の曖昧性を解消するために、データ・ストリーム中の事前に選択したデータ列の自己相関を実行し、これにより、微弱受信信号条件下での正確な時間基準信号を計算する。事前に選択したデータ列は、データ・ストリームによって構成されるGPSの航法メッセージ中の反復データ・プリアンブルとすることができる。 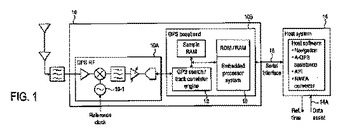 (もっと読む)
(もっと読む)
測位装置
【課題】移動する電波源に対しても高精度の測位を可能にする測位装置を提供する。
【解決手段】2機以上の衛星3,4を経由して複数の受信局5,6で受信される未知の電波源1,2からの信号間のTDOAとFDOAを用いて前記電波源の位置を推定する測位装置であって、測位装置の信号・情報処理装置7が、TDOAとFDOAを複数回計測するとともに、電波源が等速直線運動するものと仮定し、電波源の初期位置と速度を未知変数とする、前記TDOAとFDOAに関する方程式を前記TDOAとFDOAの複数回の計測結果に従って解き、前記電波源の初期位置と速度を算出する。
(もっと読む)
データ圧縮方法、データ提供方法、データ復元方法、データ圧縮装置及び測位装置
【課題】測位装置に提供するエフェメリスのデータ量を削減すること。
【解決手段】測位システム1において、サーバシステム3は、所定の地球周回軌道に沿って周回する複数のGPS衛星SVについて、外部システム2から取得した衛星予測暦に記憶されている当該GPS衛星SVの予測位置を用いて、当該GPS衛星SVの予測軌道を算出する。そして、複数のGPS衛星SVについて、同一軌道を周回する衛星の平均的な軌道である参照軌道のパラメータ値と、当該GPS衛星SVの予測軌道のパラメータ値との差分値を算出し、予測軌道のパラメータ値の代わりに差分値を記憶させることで、圧縮長期予測エフェメリスを生成する。そして、携帯型電話機4からの要求に応じて、生成した圧縮長期予測エフェメリスを携帯型電話機4に送信する。
(もっと読む)
位置適否判定方法及び位置適否判定装置
【課題】位置の適否を簡易に判定するための新たな手法を提案すること。
【解決手段】測位システム1において、携帯型電話機2は、天気予報表示処理、店舗検索処理及び時刻修正処理を行い、天気予報提供サーバ4、店舗情報提供サーバ5及び標準時提供サーバ6から、それぞれ天気予報、店舗情報及び標準時を受信する。詳細には、携帯型電話機2は、基地局3から取得した初期位置の信頼度が所定の許容値以下であると判定した場合は、初期位置を判定対象位置としたドップラーチェック処理を行うことで、初期位置が携帯型電話機2の実在位置から所定の距離以内の位置か否かを判定する。また、許容値を超えていると判定した場合は、初期位置を用いて反復回数を1回に制限した測位演算処理を行い、得られた演算位置を判定対象位置としたドップラーチェック処理を行うことで、演算位置が携帯型電話機2の実在位置から所定の距離以内の位置か否かを判定する。
(もっと読む)
衛星軌道モデル化適否判定方法、長期予測軌道データ提供方法及び衛星軌道モデル化適否判定装置
【課題】衛星軌道のモデル化の適否を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から取得したGPS衛星SVの予測位置を時系列に含んだ衛星予測暦に基づいて、GPS衛星SVの衛星軌道を近似するための近似モデルに従って予測軌道を求め、その衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を用いて、GPS衛星SVの将来位置である予測軌道サンプリング位置(算出位置)を算出し、予測位置と予測軌道サンプリング位置間の距離に基づいて、衛星軌道のモデル化の適否を判定する。
(もっと読む)
測位システム
【課題】新たな無線機を別途設けることなく電波伝搬環境に対応した補正を行い、測位精度を向上する。
【解決手段】社員P1〜4に関連づけられ移動局10A〜Dと、複数の基地局12A〜Dと、移動局10の測位処理を行う測位サーバ14とを有する。測位サーバ14は、測位処理による移動局10A〜Dの位置データの時間的蓄積に応じて、測位処理結果を補正するための補正値を算出し、その補正値の算出後、当該補正値に基づき、新たに測位された移動局10A〜Dの位置データの補正を行う。
(もっと読む)
混成GNSSおよびTDOAワイヤレス位置検出システム
汎地球測位システム(GPS)受信機および地上系アップリンク到達時間差(UTDOA)受信機を用いた位置判定方法および装置を提供する。本方法は、比較可能な相互相関係数および到達時間差をUTDOA基準局に関して計算することによって、ダウンリンク衛星測定値を透過UTDOA測定値に変換することを含む。本方法は、重み付け動作を含み、これによって、UTDOA測定値およびGPS測定値の相対的重みを、理論的スケーリング、およびそれに続く経験的調節に基づいて調節する。更に、本方法は、候補の位置検出解とUTDOAおよびGPS測定値との間における加重誤差を最小にするために用いられる距離の効率的な計算および組み合わせを含む。これは、最適な位置検出解に近づくに連れて検索動作の複雑さを増していくことによって、UTDOAについては二次元で、GPS測定値については三次元で効率的に行われる。 (もっと読む)
ゴルフ用ナビゲーションシステム
【課題】ゴルフプレイヤがホールを攻略するために重要な対象位置までの距離を表示し、プレイヤの端末操作を軽減して、より円滑にゴルフプレイを進行させるゴルフ用ナビゲーションシステムを提供する。
【解決手段】ゴルフコース呼称情報及びゴルフコース位置情報に関連付けられた重み付け情報が予め保存される記憶部10と、測位衛星からの電波を受信可能な測位衛星無線受信部12と、外部機器と双方向通信可能な外部接続部15と、を有する端末1を備え、端末1は、受信部12からの信号により現在位置を算出する測位処理と、現在位置から対象位置までの対象距離を演算する対象距離算出処理と、を行なう演算処理部7を有し、さらに、重み付けの高い対象位置までの対象距離情報と重み付けの高いゴルフコース呼称情報を表示する表示部8を有する。
(もっと読む)
GPS位置特定装置及びそのための方法
【課題】マルチパス成分によるGPSの測位性能の劣化を低減して誤差要因を除去して、単独でも位置特定精度を向上可能な位置特定装置、及び、その方法を提供する。
【解決手段】複数のGPS衛星からの電波を受信するGPS受信部と、GPS受信部で受信した電波から複数のGPS衛星の各々に対して、擬似距離を含む衛星データを出力するGPS信号処理部とを含み、単独で設けられたGPS位置特定装置において、GPS信号処理部から得られる、各衛星毎の衛星データから前記擬似距離を抽出し、抽出した擬似距離に含まれるマルチパス成分の有無を判定し、マルチパス成分の有無の判定に基づいて、擬似距離に対する加工処理の判定を行い、そして、擬似距離を含む衛星データを利用して位置計算処理を行う。即ち、受信データ中に含まれる擬似距離の変化量を使用して、マルチパスによる誤差要因を判定する解析処理と除去及び補正処理を行う。
(もっと読む)
測位装置、測位装置の制御方法及び測位装置の制御プログラム
【課題】閾値を決定して衛星電波を選択する方法では、衛星電波の新規の選択条件となる
閾値を更に追加しようとした場合、閾値の設定及び判定に関わる条件式が複雑になってし
まう可能性がある。
【解決手段】観測ベクトル生成部16が、受信した衛星電波の観測情報に基づいて観測ベ
クトル20aを生成する。次に、判定部17が、この観測ベクトル20aと、記憶部20
に予め記憶されている受信状態の良否を判定する複数の基準ベクトル20bと、に基づい
て受信状態の良否を判定する。そして、測位部18が、判定された受信状態の良否に基づ
いて測位処理を行う。
(もっと読む)
位置測定装置および位置測定方法
【課題】 電波の到達時間差および到来方位の情報を使用しないで発射源位置の測定が可能な位置測定装置の提供。
【解決手段】 位置測定装置は同一経路を同一速度かつ一定の間隔を置いて移動しながら電波発射源20からの電波を受信しかつ自己位置情報を取得する複数の移動体受信部1a,1bと、複数の移動体受信部1a,1bが受信する受信信号および自己位置情報を複数の移動体受信部1a,1bから取得する基地局通信部2と、基地局通信部2から受信信号および自己位置情報を取得し、それらの受信信号および自己位置情報に基づき電波発射源20の位置曲線を演算し、異なる時刻における複数の位置曲線の交点から電波発射源の位置を測定する電波発射源位置測定部10とを含む。
(もっと読む)
衛星軌道データの圧縮方法、衛星軌道データの提供方法、衛星軌道データの展開方法、サーバ及び測位装置
【課題】長期予測エフェメリスのデータ量を削減すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信した衛星予測暦を基に、連続する単位期間それぞれのGPS衛星SVの衛星軌道をケプラーの近似式で近似した衛星軌道パラメータの値を有してなる完全長期予測エフェメリスを生成する。そして、完全長期予測エフェメリスの各パラメータのうち、自パラメータ以外の他のパラメータの値と、自パラメータの当該単位期間の1つ前の単位期間の値とを用いて推定可能なパラメータ(推定対象パラメータ)については、当該推定対象パラメータの値を、推定値との差分値(推定値の誤差)に置き換えることで完全長期予測エフェメリスを圧縮する。そして、サーバシステム3は、完全長期予測エフェメリスを圧縮することで得られた圧縮長期予測エフェメリスを携帯型電話機4に送信する。
(もっと読む)
衛星バイアスおよび受信機バイアスの推定方法
【課題】航法衛星および衛星信号受信機のそれぞれに起因する周波数間バイアスを推定する。
【解決手段】複数周波数の衛星信号を送信する航法衛星から放送される群遅延情報から得られる放送衛星バイアスにより、各航法衛星までの位相距離の周波数間の差である周波数間差分を補正し、各航法衛星における補正した周波数間差分の最小値である最小周波数間差分のうち最頻出の値を基準衛星バイアスとし、各航法衛星における最小周波数間差分と基準衛星バイアスとの差により衛星放送バイアスを補正して衛星バイアス推定値を算出し、この衛星バイアス推定値、および電離層電子密度分布モデルから推定されるTEC値から受信機バイアス推定値を算出する。
(もっと読む)
可動物体の距離及び/又は方位を決定する装置及び方法
本発明は、可動物体の距離及び/又は方位を決定する装置及び方法に関し、該装置及び方法は、可動物体に取り付けられると共に規定周波数を有する少なくとも1つのトランスミッタとレシーバを含む。前記トランスミッタは既知の偏波面を有するアンテナを有し、前記レシーバは左円偏波アンテナ及び右円偏波アンテナを有し、前記レシーバは分析装置を備える又は分析装置に接続され、前記分析装置は規定周波数を考慮して、受信した2つの信号から2つの測定位相値を決定し、前記2つの信号により距離及び/又は方位を計算できる。逆の動作を行うデバイスでは、トランスミッタが2つの円偏波アンテナを有し、レシーバが既知の偏波面を有するアンテナを含む。 (もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
測位方法および測位装置
【課題】高精度に位置特定を行うことができるようにする。
【解決手段】基地局がGPS衛星から受信したGPS信号に基づいて算出された補正値をGPS衛星の仰角値と対応付けて配信し(S1〜S3)、移動局側では、GPS衛星から移動局が受信したGPS信号に基づいて移動局が受信したGPS衛星についての仰角値を算出した仰角算出値に近い補正値を適用して測位する(T6〜T9)。
(もっと読む)
GPS受信機とGPS信号を処理する方法
【課題】 GPSユニット中で、ドップラー情報を使用することにより、衛星の位置情報を計算すること。
【解決手段】GPSユニットで、ユニットの視界内にある衛星のドップラー情報を受信し、衛星の天文暦(エフェメリス)情報を受信せず、かつ使用せずに前記衛星の位置情報を計算する。
(もっと読む)
221 - 240 / 843
[ Back to top ]