
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
241 - 260 / 843
車両による通信を用いて車両の相対的位置を決定する方法
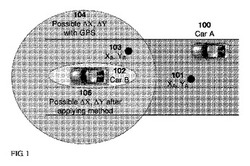
【課題】IEEE802.11に基づいた通信を利用して、第1と第2の車両の相対的位置を決定する方法を提供する。
【解決手段】 本発明の方法において、第1車両が、(a)第2車両からIEEE802.11に基づいた通信を受領するステップと、(b)前記受領した通信に基づいて、前記第2車両の、前記第1車両に対する相対的位置を決定するステップとを実行する。
(もっと読む)
GPS受信機とGPS信号を処理する方法

【課題】 GPSユニット中で、ドップラー情報を使用することにより、衛星の位置情報を計算すること。
【解決手段】GPSユニットで、ユニットの視界内にある衛星のドップラー情報を受信し、衛星の天文暦(エフェメリス)情報を受信せず、かつ使用せずに前記衛星の位置情報を計算する。
(もっと読む)
測位システム、中継装置および測位装置
【課題】伝送効率を向上できる測位システムを得ること。
【解決手段】複数の探知情報に基づいて目標の測位を行う測位装置に対して探知情報を中継する中継装置を備えた測位システムにおいて、中継装置が、複数の探知情報を受信した場合に、2つの探知情報を単位とする全組合せについて、2つの探知情報を相対的にずらしながら比較し、情報パターンを抽出して保持する情報パターン比較部24と、2つの探知情報の情報パターンが保持されている場合に当該情報パターンを含ませた探知情報を生成し、一方、情報パターンが保持されていない場合は、2つの探知情報を用いて所定の符号化処理を行い、当該符号化結果を含ませた探知情報を生成する符号化部26と、2つの探知情報を単位とする全組合せについて、符号化部26にて生成された探知情報を送信する探知情報送信部27と、を備える。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
アレイアンテナ装置および送信源位置推定方法
【課題】電離層を通過して到来した電波の送信源の位置を推定することができるアレイアンテナ装置および送信源位置推定方法を提供する。
【解決手段】演算部15は、アレイアンテナ11の受信信号から、送信源からの電波の到来方位および仰角を算出する。電離層密度推定部4は、航法衛星からの衛星信号および電離層電子密度分布モデルを用いて、3次元的な電離層電子密度分布を算出する。伝播経路推定部5は、演算部15で算出した到来方位および仰角と、電離層密度推定部4で複数の観測時刻において算出した電離層電子密度分布とを用い、観測時刻ごとに、マルチホップ伝播および地球磁場の影響を考慮した場合の複数の推定伝播経路および複数の送信源候補位置を算出し、各送信源候補位置について複数の観測時刻間の分散値を算出し、複数の送信源候補位置のうち分散値が最小となる送信源候補位置を真の送信源位置として算出する。
(もっと読む)
多周波GNSS受信装置
【課題】
第1の衛星の第1の信号形式に対して測位用擬似距離が得られないときでも、第1の衛星の第2の信号形式または第2の衛星のいずれかのデータチャンネル信号形式の測位信号を利用して測位用擬似距離を得ることにより、効率且つ有効的な測位演算を行う多周波GNSS受信装置を提供することを目的とする。
【解決手段】
第1の衛星の第1の信号形式の測位信号から測位用擬似距離が得られない場合、得られた擬似距離を所定の距離未満の擬似距離の下位部を求めると共に、該衛星の信号形式または他の衛星の測位信号から得た上位部と統合することにより測位用擬似距離を生成する
(もっと読む)
速度計測装置および変位計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の速度を求めることができる速度計測装置、および受信点の変位を求めることができる変位計測装置を提供する。
【解決手段】データ処理部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の速度成分を算出する。続いて、データ処理部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の速度成分の不定値を算出する。続いて、データ処理部3は、搬送波位相の速度成分に不定値を加算することによって、不定性を解消した搬送波位相の速度成分を算出し、それと方向余弦とに基づいて、受信点の速度を算出する。続いて、データ処理部3は、受信点速度を積算することによって受信点の変位を算出する。
(もっと読む)
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。 (もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
GPS携帯電話による測量システム
【課題】測量現場において簡便な方法で、位置、面積、距離等の概算測量をリアルタイムに実現する。
【解決手段】複数のGPS人工衛星2と、地上のGPS基地局4からの電波を同時に受信するGPS携帯電話により、多角形土地等面積Sを測量をする場合に当該多角形土地等の頂点Pを囲むように当該GPS携帯電話3を順番に移動し、当該多角形土地等の頂点Pである複数の測位地点でGPSデータを取り込み、最終測位地点でのGPSデータを取り込んだ後、当該GPSデータを一括にメールM1に添付して計算センター等5に送信し、当該計算センター等5は補正計算と多角形土地等の面積Sを計算し、土地測量の計算結果をメールM2に添付して当該GPS携帯電話あてに返信してくるとともに、当該測位地点間の距離を計算し距離の合計Lを算出することで距離の測量も可能にする。
(もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
測位装置、測位方法及び測位プログラム
【課題】GPS等の測位衛星が送信する信号の搬送波位相を利用して受信機位置を計測する測位装置において、搬送波位相距離の波数の収束計算を短縮するとともに、高精度化することを目的とする。
【解決手段】搬送波位相距離の波数の決定が容易な擬似距離などの観測量だけでなく、既に決定している搬送波位相距離の波数である整数波数を入力として、未決定の搬送波位相距離の波数の推定量である実数波数推定量を計算する。また、実数波数推定量の計算とともに、位置推定量の計算を行う。計算した実数波数推定量に基づき、搬送波位相距離の波数を決定する。
(もっと読む)
RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法
【課題】RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面の変位計測装置を提供する。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】移動体が傾斜のある場所を移動している際にも、加速度センサの出力に含まれるセンサ固有の誤差の補正が可能で精度よく移動体の現在位置を算出することが可能なナビゲーション装置を提供する。
【解決手段】所定時刻taのGPS速度Vg(ta)と時刻taから算出間隔経過後の時刻tbのGPS速度Vg(tb)の差分が許容値より小さいことにより移動体が等速度であると判定し、前回等速度と判定した時刻t1の加速度センサの出力値である加速度Axの平均値Ax1と、今回等速度と判定した時刻t2の加速度Axの平均値Ax2が一致することにより、時刻t1と時刻t2に移動体が移動する斜面の傾斜角θが同一として前記傾斜角θを求め、前記傾斜角θを用いて加速度センサの誤差αを補正値として算出し、加速度センサの出力を前記補正値により補正した値を用いて、移動体の現在位置を算出する。
(もっと読む)
GPS受信装置
【課題】自装置の位置の検出に要する時間を短縮すること。
【解決手段】携帯電話機1Aにおいて、自装置1Aから設定距離内にある他の携帯電話機1Bから、位置情報を無線通信を介して取得し、取得した位置情報に基づいて自装置1Aの位置を検出するようにした。そのため、携帯電話機1Aは、例えば、携帯電話機1j単独でGPSに基づいて自装置1Aの位置を検出する方法に比べ、自装置1Aの位置の検出に要する時間を短縮することができる。
(もっと読む)
移動体の位置検出装置、および位置検出装置を利用した車両制御装置
【課題】高精度で相対位置を測定すると共に相対位置に誤差が積算されることを防止することが可能な位置検出装置、および当該位置検出装置を利用した車両制御装置を提供する。
【解決手段】移動体の位置検出装置10は、複数のGPS衛星からのGPS信号を受信する受信アンテナ11と、各GPS信号の搬送波の位相を検出開始時刻から所定時間ごとに検出し、当該所定時間ごとの位相差を積算することにより、検出開始時刻からの位相変化量を演算する位相差積算部15と、位相差積算部により演算された位相変化量に基づいて、検出開始時刻における基準位置に対する相対位置を演算する相対位置演算部16と、を備える。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】コード位相の検出精度を高めて、測位精度を向上させること。
【解決手段】PRNコードで拡散変調されたGPS衛星信号の受信信号とPRNコードのレプリカコードとを、第1の位相探索範囲でレプリカコードの位相をずらしつつ相関積算する第1の相関積算処理を行い、第1の相関積算処理中の第1のタイミングにおける相関積算値に基づいて、第1の位相探索範囲よりも狭い第2の位相探索範囲を設定する。そして、受信信号とレプリカコードとを、第2の位相探索範囲でレプリカコードの位相をずらしつつ相関積算する第2の相関積算処理を行い、第1のタイミングにおける第1の相関積算処理の相関積算値と、第1のタイミングより遅い第2のタイミングにおける第1の相関積算処理の相関積算値とに基づいて、設定した第2の位相探索範囲の適否を判定する。そして、判定により適切と判定した場合に、第2の相関積算処理の処理結果を用いた所定の測位演算を行って測位する。
(もっと読む)
移動体間干渉測位装置及び方法
【課題】移動体間干渉測位の精度の向上。
【解決手段】本発明による移動体間干渉測位装置は、第1移動体で観測された位相積算値に関する観測データを取得する第1観測データ取得手段と、第2移動体で観測された位相積算値に関する観測データを取得する第2観測データ取得手段と、干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
(もっと読む)
移動体用測位システム
【課題】基準局側で導出される速度補正データを用いて精度良く移動体の位置等を測位することができる移動体用測位システムの提供。
【解決手段】本発明による移動体用測位システムは、基準局20に設けられ、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて速度補正データを生成する補正データ生成手段50,52と、前記基準局に設けられ、該基準局で観測して得られる衛星電波の観測データと、前記速度補正データとを移動体に送信するデータ送信手段54と、前記移動体30に設けられ、前記基準局から送信される前記観測及び速度補正データを受信するデータ受信手段40と、前記移動体に設けられ、該移動体で観測して得られる衛星電波の観測データと、前記データ受信手段で受信した前記観測及び速度補正データとに基づいて、該移動体の位置を測位する測位手段42,44,46,48とを備えることを特徴とする。
(もっと読む)
パッシブRFIDタグの三次元位置を高精度に計測する方法
【課題】
パッシブRFIDタグの3次元位置を高精度で測定する。
【解決手段】
質問器からの電波AとRFIDタグの応答電波Bの到達時間差から求まる距離と電波Aと電波Bの位相差から求まる1波長内の距離との合成から、質問器からの距離を求め、3台の質問器を使用する事で、3次元位置を高精度で計測すると共に、RFIDタグの特性の違いによる誤差を、個体情報としてRFIDタグに書き込み、補正情報として使用する事で、より高精度な測定結果を得る。
(もっと読む)
241 - 260 / 843
[ Back to top ]