
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
261 - 280 / 843
移動体間干渉測位システム、装置及び方法
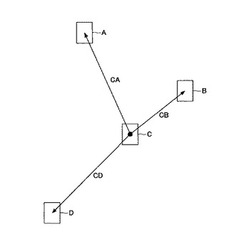
【課題】3台以上の移動体間の相対位置を効率的な測位処理で精度良く把握することができる移動体間干渉測位システム等の提供。
【解決手段】本発明は、互いに通信可能な3台以上の移動体で協動して測位を行う移動体間干渉測位システムであって、前記3台以上の移動体のうちから、基準車両として機能すべき一台の移動体を決定する基準車両決定手段と、前記基準車両決定手段により決定された基準車両として機能すべき移動体(以下、基準移動体という)に対する他の移動体のそれぞれの相対位置を、前記3台以上の移動体のそれぞれで観測される衛星電波の観測データを用いて、干渉測位する測位手段と、前記他の移動体の間の相対位置を、前記測位手段の測位結果を用いて特定することを特徴とする。
(もっと読む)
測位方法、プログラム及び測位装置

【課題】測位用信号のサーチ範囲を適切に設定することで、測位用信号の受信を効率的に
行うこと。
【解決手段】測位基礎位置を携帯型電話機1の位置とみなして算出した第1の擬似距離(
第1の整数部分)と、GPS衛星信号の発信時刻と受信時刻との時刻差に基づいて算出し
た第2の擬似距離(第2の整数部分)との差異に基づいて、測位基礎位置に対する位置誤
差が補正される。そして、位置誤差を用いてGPS衛星信号のサーチ範囲が設定され、当
該サーチ範囲に基づいてGPS衛星信号を受信して測位が行われる。
(もっと読む)
位置標定装置、位置標定システム、位置標定システムのユーザインタフェース装置、位置標定システムの標定サーバ装置および位置標定方法
【課題】車両が走行した位置を高精度に測位する。
【解決手段】位置姿勢標定装置100は、走行中の車両で取得された観測データ201、画像データ203およびレーザデータ205と予め位置が測量されている地物位置データ204とに基づいて車両の位置姿勢を標定する。地物DB検索GUI部120は、ユーザが指定した画像データ203を表示画像として表示し、地物位置データ204に基づいて撮像地域の地図を表示する。ユーザはランドマークが映っている画素とその地図表記とを指定する。三次元点群投影検索部140はレーザデータ205に基づく三次元点群モデル206を表示画像に投影し、指定画素に最も近い投影点を特定する。地物車両位置差分演算部150は投影点に対応するレーザデータ205を取得する。そして、車両位置姿勢標定部160はランドマークの既知座標とレーザデータ205が示す距離方位とに基づいて車両の位置を標定する。
(もっと読む)
相対位置検知装置、及び相対位置検知システム
【課題】3台以上の移動体間の相対位置を干渉測位によって求めると共に、干渉測位に関する信頼性判定を効率的に行なうこと。
【解決手段】自己が搭載された移動体を含む3台以上の移動体が互いに通信可能な所定の場面において、基準移動体である場合には観測データ取得手段により取得された観測データを含むデータを非基準移動体に送信し、非基準移動体である場合には観測データ取得手段により取得された観測データ及び基準移動体から受信した観測データを含むデータを用いた干渉測位を行なって基準移動体との相対位置を算出すると共に、干渉測位の結果として算出される整数値バイアスを含むデータを他の非基準移動体に送信して干渉測位に関する信頼性判定結果を受信する処理と、他の非基準移動体から整数値バイアスを含むデータを受信して干渉測位に関する信頼性判定を行なう処理とのいずれか一方を行なう。
(もっと読む)
擬似距離算出方法、測位方法、プログラム及び測位装置
【課題】測位精度を向上させるための新たな手法を提案すること。
【解決手段】携帯型電話機1において、GPS衛星から発信されるGPS衛星信号の受信信号を、位相特性の異なる高感度フィルタ131及び高精度フィルタ133それぞれに通過させる。そして、各フィルタを通過した各信号からコード位相を算出し、算出した2つのコード位相を基に所定の平均演算を行って、平均コード位相を算出する。そして、算出した平均コード位相に基づいて、測位演算に使用する擬似距離を算出する。
(もっと読む)
測位方法、基地局、および測位システム
【課題】リピータ局を介した通信が可能な移動通信機の位置を測位する際の測位精度をより高くすることができる測位方法および基地局装置を提供する。
【解決手段】基地局Bからリピータ局Nまでの距離と、リピータ局Nから携帯電話端末Mまでの距離とを加算した加算距離を基地局Bが算出し、基地局Bからリピータ局Nへの方向で、且つ、基地局Bから加算距離にある地点Pを、測位結果地点として基地局Bが算出して記憶する測位ステップと、測位結果地点Pと、携帯電話端末Mが在圏するセルセクタの中心地点Cとの差分距離Scpを基地局Bが算出して記憶する算出ステップと、差分距離Scpの方がセルセクタの半径Rより長いか否かを、基地局Bが判定する判定ステップと、差分距離Scpの方が半径Rより長いと判定された場合、中心地点Cを、測位結果地点として基地局Bが変更して記憶する変更ステップと、を有する。
(もっと読む)
データ送信装置、データ送信方法、データ送信プログラム、測位装置、測位方法及び測位プログラム
【課題】電子基準点が衛星から取得したデータから生成された補正データを用いて測位を行う場合に、電子基準点の切り替えに伴う測位結果の不連続性を回避することを目的とする。また、測位に使用する補正データのデータ送信量を低減することを目的とする。
【解決手段】データ送信装置101は、各電子基準点が衛星から取得したデータから上記各電子基準点に固有の誤差量を示す基準点固有誤差を計算する。データ送信装置101は、計算した上記各電子基準点の基準点固有誤差を補正データとして測位装置201へ送信するとともに、任意の1つの電子基準点の擬似距離と搬送波位相とを測位装置201へ送信する。測位装置201は、受信した補正データと、擬似距離と搬送波位相とに基づき、測位する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】IMM演算を用いた測位方法において、モデル確率を正しく求めるための新たな手法を提案すること。
【解決手段】カルマンフィルタ処理それぞれの尤度指標値「Vx」が算出され、この尤度指標値「Vx」のカルマンフィルタ処理間の相対値が算出される。そして、算出された相対値を用いてカルマンフィルタ処理それぞれのモデル確率「μ」が算出され、このモデル確率「μ」を用いてカルマンフィルタ処理それぞれの処理結果が合成されることで測位位置が決定される。
(もっと読む)
航法データ更新通知システム及び方法
【課題】衛星航法補強システムに採用することにより、地上システムと機上システムとで使用する航法データを一致させて測位精度の悪化を回避して安全性を図る。
【解決手段】衛星から受信したレンジング信号に含まれる誤差を推定し、その誤差を修正するための補正情報をフォーマッティングして送信する地上システムと、前記測位衛星から受信したレンジング信号と、前記フォーマッティングされた補正情報とに基づいてディファレンシャルGPS測位演算し規定ルートからの変位を表示する機上システムとを有し、前記地上システムは、前記補正情報を生成する際に使用したSBAS航法データが更新された際に航法データの更新を前記補正情報に付加して通知する。前記機上システムは、前記送信される前記SBAS航法データ更新の通知を検出し、前記更新されたSBAS航法データに切り替えて前記ディファレンシャルGPS測位演算する。
(もっと読む)
測位装置、通信システム及び測位方法
【課題】測位時点での電波環境の影響による伝播誤りと伝播遅延の検知誤りの両方を考慮した上で、測位誤差を適正に補正し、測位結果の信頼性を向上させる。
【解決手段】測位サーバ10は、移動局が位置するエリアを推定する測位部14と、複数のエリアの各々について伝播誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶した伝播誤り補正情報記憶部19と、同一のセクタに属する複数のエリアにおいて伝播遅延誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶したPD誤り補正情報記憶部16と、上記の記憶部19、16から読み出した、複数回の測位結果より対応付けられる正解とされるエリアおよび当該正解とされる確率に基づき測位結果を補正する補正部12と、測位結果を出力する測位結果出力部13とを備える。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
情報処理装置、位置推定方法、プログラム、および人工衛星システム
【課題】航法メッセージに含まれる衛星位置情報を利用することなく、人工衛星の位置を早期に推定可能とする。
【解決手段】1または2以上の周期関数項の和で表される人工衛星の位置の推定式に任意の時刻を代入することにより、前記任意の時刻における前記人工衛星の位置を推定することにより、前記任意の時刻における前記人工衛星の位置を推定する衛星位置推定部を情報処理装置に設ける。前期周期関数項の各々の係数が算出されてから所定時間が経過したか否かを判断し所定時間が経過したと判断されると、前記周期関数項の各々の係数を再度算出する。
(もっと読む)
基地局または受信装置および移動局測位システム
【課題】マッチドフィルタなどの大規模な回路を必要とすることなく受信時刻を精度よく検出することができる受信装置(基地局12)、および移動局位置測位システムを提供する。
【解決手段】受信部26により受信した符号データにおけるデータ変化タイミングを測定する受信符号解析部30と、測定されたデータ変化タイミングと予め記憶されたレプリカ符号におけるデータ変化タイミングとを、両者のいずれか一方を所定のずらし量だけずらして比較し、相関指標値を算出する時間ずれ検出部32と、前記ずらし量を受信符号解析部30における分解能に基づいて決定するずらし量決定部38と、算出される相関指標値が最小となる際のずらし量に基づいて受信時刻を算出する受信時刻算出部44とを有し、受信時刻算出部44によって算出された複数の基地局12における移動局からの電波の受信時刻に基づいて移動局の位置を算出する。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行うGNSS受信装置は、山により影響を受ける測位信号を送信するGNSS衛星を選択するGNSS衛星選択手段と、GNSS衛星選択手段により選択されたGNSS衛星をマスクして測位演算を行う第1の測位演算手段とを有する。
(もっと読む)
移動局測位システム
【課題】基地局数が増加しても演算量が増加したり、あるいは移動局の大型化や高コスト化を伴うことなく精度の高い移動局の測位を行なうことのできる移動局測位システムを提供する。
【解決手段】複数の基地局12が受信する電波に含まれる拡散符号とレプリカ符号との相関値の大きさを予め定められた関係に基づいて算出する相関演算部64と、相関演算部64によって算出された相関値の大きさに基づいて予め記憶された関係から移動局10から各基地局12への無線通信における通信誤差に関する誤差関連値を各基地局12について算出する相関値誤差変換部68と、誤差関連値に基づいて予め記憶された関係により測位における各基地局12の重みを表す重み行列を決定する重み行列生成部72と、複数の基地局12のそれぞれにおける移動局10から送信される電波の受信結果と重み行列とを用いて、移動局10の位置を算出する測位部とを有する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】利用者が手動操作で受信を行う際に、測位処理の終了までやタイムアウトまでの時間を把握でき、利便性を向上できて使い勝手の良い衛星信号受信装置を提供すること。
【解決手段】GPS付き腕時計は、GPS衛星から送信される衛星信号を受信する受信回路と、ディスプレイと、制御部20とを備える。衛星信号は、複数のサブフレームを備える。制御部20は、受信部の動作を制御する受信制御手段51と、複数のGPS衛星から受信した衛星信号によって測位処理を行う測位処理手段53と、受信した衛星信号に含まれるサブフレームの種類を判定し、最初に受信したサブフレームの種類の判定結果によって測位処理が終了するまでの測位残時間を算出する測位残時間算出手段54と、前記測位残時間を前記ディスプレイに表示する表示制御手段55とを備える。
(もっと読む)
無線測位システム及び無線測位方法
【課題】インフラ側に簡易な送信機能のみを有する基地局を設置し、複雑な送受信機能を有する基準局の数を減らすことで、無線測位システム全体のコストを低減することを課題とする。
【解決手段】複数の基地局A,Bから、互いに非同期で無線信号R1を少なくとも一つの基準局Pと移動端末Mとに送信する。基準局Pが無線信号R1に応答して無線信号R2を移動端末Mに送信する際、無線信号R1を受信した受信時刻と無線信号R2を送信した送信時刻とを無線信号R2に含ませて送信する。移動端末Mが受信した無線信号R1の受信時刻と、移動端末Mが受信した無線信号R2の受信時刻と、移動端末Mが受信した無線信号R2に含まれた受信時刻及び送信時刻とに基づいて、移動端末Mの位置を演算により求める。
(もっと読む)
移動体用測位装置
【課題】擬似距離の誤差の大きい場合でも精度の良い測位演算を行う。
【解決手段】擬似距離を算出するPSR算出手段と、ADRを算出するADR算出手段と、擬似距離に基づいて移動体の位置を測位する測位手段と、衛星位置を算出する衛星位置算出手段と、前回周期における移動体の位置の測位結果と、前回周期における衛星位置の算出結果との差分ベクトルの大きさに基づいて、前回周期における擬似距離の推定値を算出する前回値PSR推定手段と、推定前回値に、前回周期と今回周期において算出された各ADRの差を足し合わせて、今回周期における擬似距離の推定値を算出するPSR推定手段と、擬似距離の誤差が所定許容範囲を超えたか否かを判定するPSR誤差判定手段とを備え、測位手段は、今回周期において擬似距離の誤差が所定許容範囲を超えたと判定された場合に、該擬似距離に代えて、推定擬似距離に基づいて、今回周期における移動体の位置を測位する。
(もっと読む)
261 - 280 / 843
[ Back to top ]