
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
41 - 60 / 843
測位装置、測位方法
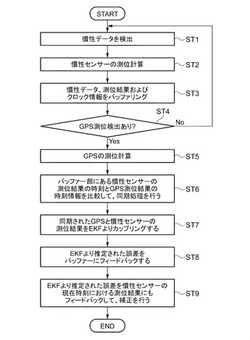
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
(もっと読む)
測位システム、測位方法

【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
(もっと読む)
測位装置及び電子機器
【課題】測位装置が測位に要する時間を外部に通知することにより、測位終了を待っている利用者の心理的な負荷を軽減する衛星測位システムの測位装置を提供する。
【解決手段】測位装置は、衛星から受信した測位信号に基づいて測位を行う測位装置であって、測位信号をサーチする範囲を計算する第一計算手段10と、測位信号をサーチするステップを計算する第二計算手段11と、測位信号を積算する時間を計算する第三計算手段12と、第一計算手段10と第二計算手段11と第三計算手段12と、を使って測位計算が完了するまでの予測所要時間を計算する第四計算手段13と、第四計算手段13で計算される予測所要時間を初期値として時間管理を開始するタイマー手段14と、タイマー手段14で管理される予測所要時間を通知する通知手段15と、を備える。
(もっと読む)
測位支援装置
【課題】本発明は、測位支援装置に関し、測位の精度を高めることを目的とする。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
(もっと読む)
ターゲット識別装置およびターゲット移動予測方法
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
(もっと読む)
位置算出方法及び電子機器
【課題】位置算出用モジュールを搭載した電子機器における位置算出主体の適正化。
【解決手段】GPS処理部10と、GPS処理部10よりも演算処理能力の高いホスト処理部30とを備えた携帯型電話機1において、GPSアンテナ5は、GPS衛星から送出されるGPS衛星信号を受信する。GPS処理部10は、GPSアンテナ5が受信した信号に対する衛星サーチを行い、位置算出の基礎情報とするメジャメント情報を算出する。そして、ホスト処理部30は、GPS処理部10がメジャメント情報に基づいて位置算出するセルフモードと、ホスト処理部30がメジャメント情報に基づいて位置算出するホストモードとを、記憶部100に記憶されたモード切替条件テーブル103に従って切り替える。
(もっと読む)
位置推定プログラム、位置推定装置、及び位置推定方法
【課題】測定誤差情報を有効に利用して、測位対象の位置をより精度よく推定する位置推定プログラムを提供する。
【解決手段】位置推定プログラムは、複数の送信機からの信号を受信して行った測位により得られる位置と該位置の測定誤差とにより表される楕円形状の誤差領域を示す誤差領域情報を出力する測位部を用いて、複数回測位を行って得られた複数の前記誤差領域情報を取得し、前記取得した各誤差領域情報により示される前記誤差領域を長軸方向へ延長し、前記延長した誤差領域同士が交差する交差領域に基づいて測定対象の位置を推定する処理をコンピュータに実行させることにより、上記課題の解決を図る。
(もっと読む)
サービス情報提供システム
【課題】コスト増大を招くことのない安価なシステム構成で、通信端末の位置するサービス領域に応じた最適なサービス情報を提供する。
【解決手段】建造物内の複数のエリアを移動可能な通信端末1と、通信端末1と無線通信可能なセンター装置2と、を有するサービス情報提供システムSであって、通信端末1は位置検出用電波を発し、センター装置2は、建造物内の所定の測定地点に設けられ、通信端末1の位置検出用電波の発信点を特定するとともに発信点の位置と、発信点からの位置検出用電波に含まれるID情報とによる特定結果に基づき、通信端末1が存在するエリアを検出し、この検出結果に基づき、対応したエリア情報を通信端末1へ送信し、通信端末1は送信されたサービス情報を表示する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
(もっと読む)
位置推定方法、端末装置及びプログラム
【課題】位置推定方法、端末装置及びプログラムに関し、位置推定精度を低下させることなく端末装置の消費電力を低減することを目的とする。
【解決手段】端末装置の移動距離を算出し、移動方向の変化が検出されてから所定時間後に絶対位置を取得する処理を繰り返し、1回目の処理で取得した第1の絶対位置と2回目の処理で取得した第2の絶対位置を通る移動距離の長さを有する第1のリンクを算出し、第1及び第2の絶対位置と3回目の処理で取得した第3の絶対位置に最も近く第1の絶対位置を通らない移動距離の長さを有する第2のリンクを算出する。第1及び第2のリンクの第1の絶対位置に対する方位を示す角度の差が所定値以内であれば第2のリンクの角度を第1の絶対位置の直前のリンクと直後の第1のリンクとがなす角度とみなし、第1の絶対位置の直前のリンクと直後の第1のリンクを接続したリンク形状に基づいて端末装置の現在位置を推定するように構成する。
(もっと読む)
無線通信装置、プログラム、および位置推定方法
【課題】システムを大掛かりにせず、高精度に無線タグの位置を求める。
【解決手段】リーダ100は、無線通信手段と、検出手段と、推定手段とを備える。無線通信手段は、物品タグB09、B24及び複数の位置タグP1−P15に問合せ信号を送信し、これら物品タグB09、B24及び位置タグP1−P15からの応答信号を受信する。検出手段は、無線通信手段が受信した応答信号の受信信号強度を検出する。推定手段は、検出手段が検出した物品タグB09、B24からの応答信号の受信信号強度、及び、位置タグP1−P15からの応答信号の受信信号強度に基づいて、各位置タグP1−P15の位置に対する物品タグB09、B24の位置を推定する。
(もっと読む)
電波推定方法、及び電波推定プログラム、並びに電波推定装置
【課題】発信点推定における推定精度を大きく向上する。
【解決手段】電波の発信点TPを推定する電波推定方法であって、建造物H内に位置する所定の受信点RPから、ビームフォーミングによりアレイアンテナ3の指向性を制御しつつ、所定の受信角範囲における全ての方向にわたって電波を受信する第1処理段階G1と、この受信した全ての方向に含まれる複数の主要到来角それぞれに対し、受信点RPからレイトレーシング法により光を仮想的に仮想光線として放射し、建造物H内の仮想電波伝播経路を算出する経路図において、建造物Hの構造及び各構造材の材質を仮想電波伝播経路を算出するパラメータとして用いて、放射した複数の仮想光線の中から異なる任意の2仮想光線を選択する組み合わせによって抽出された2仮想光線がお互いに最も近づいた位置を経路図上の近接点として、近接点を全て抽出する第3処理段階G3及び第4処理段階G4とを有する。
(もっと読む)
1つ以上の基地局に関して無線移動装置の位置を推定すること
【課題】一つ以上の基地局に関して無線移動基地局の位置を推定する方法を提供する。
【解決手段】複数の基地局(BTS)を持っている通信網において移動装置(MS)の位置を推定する第1の方法は、MSがBTSのうちの1つのみと通信することができるエリアを決定する。そのエリア内の平均位置が計算され、推定として使用される。第2の方法はMSが2つのBTSのオーバーラップしているカバレージエリア内にあるエリアを決定する。各BTSからMSによって受信された信号の到着の相対時間差が一定の距離点の軌跡が決定される。MSで、1つのBTSの第1および第2のセクター間の相対的な信号電力に基づいた角度θを有する線が、軌跡と交差する点が決定され、MSの位置の推定として使用される。
(もっと読む)
位置情報の決定
【課題】物体から受信機の一つへの直接信号が遅延した反射信号と比べて弱い場合でも精度良く物体の位置を決定する。
【解決手段】複数の受信エレメントを含む、受信するための手段と、受信エレメントで受信された信号106を検出し、受信信号を表す出力信号を生成するための検出手段と、各受信エレメントごとに、他の任意の受信エレメントで受信される信号から生成される任意の出力信号とは別に、その受信エレメントで受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号106を表すパラメータのそれぞれの値を得るように動作可能な処理手段とを含み、処理手段はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得する。
(もっと読む)
衛星測位装置
【課題】より精度良く現在位置を算出する「衛星測位装置」を提供する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
(もっと読む)
移動端末の位置情報判別方法および装置
【課題】移動端末の位置情報を実際の環境に即して精度よく判別することができる位置情報判別方法および装置を提供する。
【解決手段】位置情報判別装置20は、移動端末10が基地局から受信した無線信号の受信電力の所定値からの変化量と当該変化量の継続時間とに依存する判別値を算出する判別値算出部(判別式生成部207,制御部208)と、判別値を所定値と比較することで移動端末10の位置が建物内か建物外かを判定する判定部(制御部208)と、を有する。
(もっと読む)
WLAN及び他の無線ネットワークの位置測定方法
【課題】WLAN及び他の無線ネットワークにおいてアクセス点及び端末を位置測定する。
【解決手段】アクセス点位置測定のために、測定値はWLANにおける少なくとも一つのアクセス点について取得される。測定は各アクセス点によって定期的に伝送される伝送系列(例えば、ビーコン・フレーム)に基づく。測定は多数の端末によって異なる場所で、或いは一つの移動端末によって異なる場所で行われる。各アクセス点の場所は端末の測定及び既知の場所に基づいて決定される。端末位置測定に関して、WLANにおける少なくとも一つのアクセス点に関する測定値が取得される。端末の場所は各アクセス点の測定及び既知の場所に基づいて決定される。測定は往復時間(RRT)測定、観測時間差(OTD)測定、到着時間(TOA)測定、信号強度測定、信号品質測定、等々である。
(もっと読む)
センサ管理装置、センサ管理方法及びプログラム
【課題】位置が固定された各センサの計測範囲を容易に推定すること。
【解決手段】位置が固定された複数のセンサの全部又は一部と、位置が固定されていない移動物体(2)との間のそれぞれの距離を示す距離情報を、前記センサ又は前記移動物体から受信する受信手段(31)と、複数の前記距離情報に基づいて、各々の前記センサ及び前記移動物体の位置を推定する第1の処理手段(32)と、推定された各々の前記センサ及び前記移動物体の位置に基づいて、各々の前記センサについて、当該センサに係る計測を可能にする範囲を示す計測範囲を算出する第2の処理手段(33)とを備え、前記第2の処理手段(33)は、前記センサの計測範囲を推定するにあたって、極座標を用いて前記センサの計測範囲の境界線を推定することを特徴とする。
(もっと読む)
測位システム、及び測位方法
【課題】設置コストを抑えた測位システム、及び測位方法を提供することを課題としている。
【解決手段】測位信号s1を送信するターゲット・ノード1と、測位信号を受信した後、基準信号s2を送信する少なくとも1つ以上の第1のリファレンス・ノード2aと、測位信号および基準信号を受信し、測位信号の受信時刻と基準信号の受信時刻とを測定し、測定した測位信号の受信時刻と基準信号の受信時刻とに関する情報を測位サーバに各々送信する少なくとも2つの第2のリファレンス・ノード(2b,2c)と、複数の第2のリファレンス・ノードから送信された各々の測位信号の受信時刻と基準信号の受信時刻と、第1と第2のリファレンス・ノードの各々の位置情報と、第1のリファレンス・ノードのタイムラグとに基づきターゲット・ノードの位置を推定する測位サーバ4とを備える。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
41 - 60 / 843
[ Back to top ]