
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
61 - 80 / 843
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
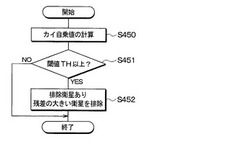
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置

【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
衛星信号捕捉方法及び受信装置
【課題】衛星信号の捕捉を適切に行うための新たな手法の提案。
【解決手段】GPS衛星からのGPS衛星信号を受信した受信信号を用いて、第1のドップラー周波数である仮ドップラー周波数を算出する。そして、加速度センサーを少なくとも含むセンサー部の計測結果を用いて慣性航法演算を行う慣性航法装置の算出結果と、仮ドップラー周波数とを用いて、第2のドップラー周波数である補助ドップラー周波数を算出する。そして、補助ドップラー周波数を用いてドップラー周波数を算出して、GPS衛星信号を捕捉・追尾する。
(もっと読む)
移動体高精度速度計測装置及び方法
【課題】GPS受信機から得られるドップラー速度情報の良否を判定し、高精度及び高信頼の速度をリアルタイムに出力する装置及び方法を提供すること。
【解決手段】移動体高精度速度計測装置10は、移動体の加速度及び角速度からストラップダウン演算により速度を算出し、GPS搬送波のドップラーシフト量から移動体のドップラー速度を測定し、ドップラー速度から良否係数を算出する。次に、遅延させたドップラー速度と、フィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量を算出し、算出した誤差量に良否係数を乗算し、良否係数を乗算した誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。そして、ストラップダウン演算により算出した速度に、カルマンフィルタによって推定演算された調整量を融合してリアルタイム補間速度を算出し、出力する。
(もっと読む)
受信機
【課題】各チャンネルのデータを退避する際に使用するメモリの使用量を削減する。
【解決手段】受信機1は、衛星信号の信号雑音比を取得し、メモリ18へ退避すべき必要ビット数を衛星信号の信号雑音比に基づいて決定する。全てのチャンネルに対して全てのビット数をメモリ18へ退避するのではなく、信号雑音比が所定の条件を満たすチャンネルに対しては一部のビット数を削減して残りのビット数をメモリ18へ退避することで、各チャンネルのデータを退避する際に使用するメモリ18の使用量を削減する。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS測位演算装置10は、GPS衛星から発せられる信号に含まれる軌道情報から、信号発信時点でのGPS衛星の、位置Aと、軌道速度vと、時刻tbと、高度hに関する軌道情報を取得し(S105)、軌道速度vと時刻tbとから、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、GPS衛星の位置Bと測定点の位置Oとを結ぶ第1の線分に対する地平線の第1の角度αを第1の線分の距離ctと高度hから算出し(S107)、第1の線分の距離ctと、第1の角度αと、軌道速度vとに基づき、GPS衛星の位置Aと測定点の位置Oとを結ぶ第2の線分の距離csを算出し(S107)、測位演算を行う(S111)。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
相対測位装置、および相対測位方法
【課題】端末間の相対位置を精度高く取得できなかった。
【解決手段】GPS信号受信部と、受信SNR等の自端末に関する情報である2以上の衛星ごとの自端末衛星情報群を有する自端末情報群を取得し、自端末情報群のうちの一部または全部の情報を送信し、受信SNR等の他端末に関する情報である2以上の衛星ごとの他端末衛星情報群を有する他端末情報群のうちの一部または全部の情報を受信し、2以上の衛星ごとの自端末衛星情報群のうちの1以上の情報、および2以上の衛星ごとの他端末衛星情報群のうちの1以上の情報を用いて、衛星ごとに相関性が高いか否かを判断する相関性判断部と、相関性が高いと判断された衛星の信号を用いて、相対位置を取得し、出力する相対測位装置により、相関性が高い衛星の情報を用いて、端末間の相対位置を精度高く取得できる。
(もっと読む)
GNSS解析システム、GNSS解析装置、及びGNSS解析プログラム
【課題】キネマティック方式とスタティック方式の両者の特徴を活かした基線解析を現場で実施可能な基準局を提供する。
【解決手段】基準局2は、GNSS受信部24と、無線受信部25と、データ処理部41と、時系列取得部40と、を備えている。GNSS受信部24は、GNSS衛星からの電波を受信して自局観測データを取得する。無線受信部25は、GNSS衛星からの電波を受信した計測局3から出力された観測データである他局観測データを取得する。データ処理部41は、所定の繰り返し時間内に取得された自局観測データ及び他局観測データを処理して測位結果を得る。時系列取得部40は、データ処理ステップを、前記繰り返し周期ごとに繰り返し実行して、測位結果の時系列を取得する。そして、時系列取得部40は、繰り返し時間を異ならせた複数の時系列を取得している。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
位置推定判定装置及び位置推定判定方法
【課題】位置情報を受け付ける利用者を混乱させにくくすることができる位置推定判定装置及び位置推定判定方法を提供すること。
【解決手段】移動局の位置を推定する推定装置が、水平偏波及び垂直偏波の双方を受信可能なアンテナを有し、かかるアンテナによって受信された水平偏波の受信電界強度と垂直偏波の受信電界強度との比である偏波比を算出するとともに、偏波比の時間変動量を算出し、偏波比が大きく、かつ、偏波比の時間変動量が小さいほど、位置推定精度が高いと判定する。
(もっと読む)
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】位置決定における誤警報の処理のための方法および装置を提供する。
【解決手段】方法は位置決定処理における測定値誤警報確率を推定して使用し、推定された測定値誤警報確率は決定された位置ソリューションの信頼性または収集としての測定値のセットの信頼性を決定するために結合され、推定された測定値誤警報確率は誤った測定値の分離および除去において使用される。例えば、誤った測定値を識別するための伝統的な幾何学ベースのメトリックは誤った測定値を決定するために測定値誤警報確率に従ってさらに重みづけされる。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】新たな位置算出手法の提案。
【解決手段】GPS衛星からGPS衛星信号を受信して擬似距離が算出される。そして、擬似距離に含まれる誤差(残差)の分布を正規混合分布で表した擬似距離正規混合分布モデルを用いて、最尤推定法に基づく位置算出計算が行われることで、位置算出装置(ユーザー)の位置が算出される。擬似距離正規混合分布モデルは、位置算出装置の通常時の受信環境を想定した第1の正規分布関数“p1(ε)”と、マルチパス環境を想定した第2の正規分布関数“p2(ε)”とを混合した確率密度関数として定義される。
(もっと読む)
アナログモードで作動しているGPS装備無線装置の位置を見つける方法および装置
【課題】ネットワーク時間の感覚を持たないかもしれないアナログモードで作動している遠隔局の位置を見つける装置および方法を提供する。また、真のGPS時間を知らないアナログモードで作動している遠隔局が自身の位置を決定することを可能にする。
【解決手段】サテライト距離測定がなされる近似の時間を反映しているタイムスタンプが、遠隔局またはネットワークの何処かのいずれかで測定に割当てられる。真のGPSネットワーク時間および測定時間間の差が、知られていない長さの測定の可変“誤差”として取扱われる。可変誤差が決定され、遠隔局の物理的位置を決定する。
(もっと読む)
地上補強型衛星航法システム、該システムに用いられる衛星異常検出方法及び衛星異常検出プログラム
【課題】空港周辺の所定距離内の空域で航空機の進入着陸誘導を行う地上補強型衛星航法システム中で、衛星の異常を検出する精度を向上させる。
【解決手段】各測位信号のうちで、傾斜した電離層を越えて伝搬する測位信号があるとき、擬似距離補正値補正手段(擬似距離補正値補正部23a)により、同測位信号に対応した擬似距離補正値に対して、対応する測位衛星(GPS衛星10)の測位手段(GPSアンテナ21、GPS受信機22)に対する仰角の関数で表される電離層傾斜係数を用いて正規分布に近付くように補正して各検定統計量として生成される。衛星異常検出手段(インテグリティモニタ23b)により、擬似距離補正値補正部23aで生成された各検定統計量を用いて各GPS衛星10の異常の有無が検出される。
(もっと読む)
衛星測位受信機
【課題】測位信号の受信において、擬似距離生成が開始されるまでの時間を短縮して、TTFFをより短縮する。
【解決手段】SPS用受信アンテナで受信されたRF信号にフロントエンド処理を行うフロントエンド手段と、フロントエンド処理により得られたデジタル信号に対して信号捕捉および追尾処理を行って信号伝播時間を得るベースバンド処理手段と、当該信号伝播時間に基づき疑似距離計算および測位計算を行う航法計算手段とを備え、ベースバンド処理手段が、複数の衛星のうち、一番最初に航法データをデコードして信号が送信されたSPSシステム時刻を得た基準衛星については、従来手法どおりにそのシステム時刻を使って信号伝播時間を算出し、それ以外の衛星については、その衛星と基準衛星とのコード位相差を求め、コード位相差から信号伝播時間を算出する。
(もっと読む)
高速TTFFのための方法及び装置
高速TTFFのための方法及び装置
少ない数のGPS衛星と同期および非同期基地局を使用して位置を決定する方法および装置
【課題】グローバル位置決定システム(GPS)衛星と、GPS時間に同期している基地局と、GPS時間に非同期の基地局とを使用している無線通信装置の位置を決定する方法および装置を提供する。
【解決手段】非同期基地局は互いに同期している。到着時間情報は、無線通信装置が基地局からの受信されたGPS時間情報が無線通信装置に通知する信号の受ける遅延である片道遅延によりバイアスされた情報を受信することを考慮して調整される。さらに、GPS時間に同期されていない基地局に対する到着時間差情報はこれらの基地局GPS時間間のバイアスが消去されることを可能にする。
(もっと読む)
61 - 80 / 843
[ Back to top ]