
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
101 - 120 / 843
関数の局所極大又は極小のパラメータを推定するための手順

【課題】関数の局所極大又は極小のパラメータを推定するための手順。
【解決手段】受信された信号から導出された相関関数の局所極大又は極小のパラメータを推定するための方法及びシステム。内挿された局所極大又は極小が、決定される。内挿オフセットは、その後、導出され、内挿された関数の局所極大又は極小の位置とサンプリングされた関数の局所極大又は極小の位置との間の差を備える。パラメータの推定値は、内挿オフセットから導出される。
(もっと読む)
電子密度推定装置及び電子密度推定方法

【課題】3次元の高さ方向及び水平方向の電離層電子密度分布をより正確に推定し、衛星で観測できない空間部分の推定も可能とする電子密度推定装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する電子密度推定装置であって、1以上の受信機の各々から複数の測位衛星の各々に対する擬似距離およびキャリア位相擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し、当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、総電子数算出部により算出された総電子数に基づいて3次元電子密度推定空間設定部36により分割された領域毎の電子密度を推定する暫定電子密度推定部38と、推定された電子密度に基づいて、同じ高さの電子密度を抽出し、球面調和関数を用いて高さ毎の電子密度分布を近似して推定する3次元電子密度推定部39とを備える。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
GPS信号及び屋外指向性アンテナを有する擬似衛星に基づく屋内測位システム
この発明は、少なくとも3つのGPS衛星(S)から到来する特定のGPS信号を受信するための少なくとも3つの指向性GPSアンテナ(2)と、上記指向性GPSアンテナ(2)から到来するGPS信号を増幅するための少なくとも3つのRFGPSリピータ(3)と、上記RFGPSリピータ(3)から到来するGPS信号を屋内に送信するための少なくとも3つのGPSアンテナ(6)と、その(7)アンテナ(8)によって上記GPSアンテナ(6)から到来するGPS信号を受信するための少なくとも1つのGPS受信機(7)と、新しい位置計算方法(100)とを備え、屋外でのGPS信号の屋内に対するカバレッジを増加させることに関する。  (もっと読む)
(もっと読む)
方位角推定装置、方法及びプログラム
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
紛失モバイル端末機の位置推定システム、方法及びモバイル端末機
【課題】紛失された携帯電話の電源がOFFになった場合、他の非常用の一時的バッテリーによって信号を送受信することで紛失された携帯電話の位置追跡を可能にする。
【解決手段】本発明の一様態に係る位置推定システムは、活性化信号を送信し、活性化信号に応答したモバイル端末機から端末機IDとGPS位置情報を受信し、端末機ID及び距離情報の受信時間と端末機ID及びGPS位置情報を伝送する多数の基地局及び各基地局の位置と、各基地局から伝送された受信時間及びGPS位置情報を利用して端末機IDに対応するモバイル端末機の位置を推定するコンピューティング装置を有する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
高度出力装置、高度出力方法及びプログラム
【課題】GPS信号に基づく3D測位による高度表示の不適切な変動を防止すること。
【解決手段】GPS信号に基づいて移動体のGPS高度を算出するGPS処理部と、気圧を計測する気圧計測部と、前記GPS処理部により算出されるGPS高度の信頼度を判定する判定部と、前記判定部により判定される前記信頼度に応じて、前記移動体の絶対高度を出力する出力部と、を備え、前記出力部は、前記信頼度が予め定義される出力基準を満たす場合には、前記GPS処理部により算出された最新のGPS高度を前記移動体の絶対高度として出力し、前記信頼度が前記出力基準を満たさない場合には、絶対高度の過去の出力値と前記気圧計測部により計測された気圧とを用いて算出される高度を前記移動体の絶対高度として出力する、高度出力装置を提供する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
非同期ネットワーク局のクロックのずれを補正するための補正因子の計算を用いたTDOAに基づく位置測定方法
本発明は、ユーザーデバイスからの信号の到達時間差を得るために、個々の受信局のクロックの相対的な挙動を引き出し、相応にモデル化するクロッキング方法、クロッキング装置、およびコンピュータプログラム製品を提供する。本発明は、モデル化されたクロック挙動に基づいて、到達時間差を補正して、複数の受信局のクロックを同期させることを必要とすることなく、受信したユーザー信号の正確なクロッキングを導くために使用することができる。この原理は、複数の組の受信局、およびその受信局間で送信されるビーコン信号に適用でき、ユーザーデバイスの正確な位置推定を可能にする。 (もっと読む)
携帯ナビゲーションシステム
【課題】GPS電波が届きにくい場所でも利用でき、位置検出精度が高い携帯ナビゲーションシステムを提供する。
【解決手段】予め定められた位置に、互いに周波数が異なる交流磁界を発生する少なくとも3個の磁界発生源4a〜4cが配置されている。携帯端末2に搭載されている3軸磁気センサ3aを用いて、交流磁界を検出する。そして、交流磁界を周波数毎に分解し、周波数毎の交流磁界の強さを算出する。この値から、携帯端末2から磁場発生源までの距離を算出し、携帯端末2の位置を特定する。これにより、GPS電波が届きにくい場所でも、ユーザ6の進行開始位置を精確に特定することが可能になる。また、ユーザ6が移動した場合には、自律航法によってユーザ6の現在位置を特定する。
(もっと読む)
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
(もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 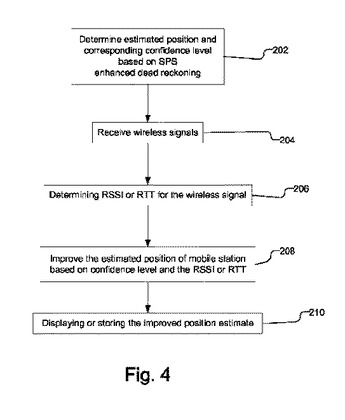 (もっと読む)
(もっと読む)
拡張SPS軌道情報を用いた位置特定のための方法および装置
【課題】じかに衛星からまたは場所支援サーバから必要なアルマナックおよび/またはエフェメリスをダウンロードする頻度を減らす。
【解決手段】サーバが、衛星の大まかな軌道データと衛星の正確な軌道データとの間の訂正を計算する。訂正の変化が時間を通じて大幅に滑らかになるよう座標系を選択する。サーバはさらに、移動局への伝送に必要なビット数を減らすために、数学関数を用いて訂正を概算する。移動局は、係数を受信すると、係数および適用時間(たとえば現在の時間)を用いて数学関数を評価し、評価した結果を標準的な座標系に変換し、変換結果を大まかな軌道データに適用して正確な軌道データを取得する。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
全地球的航法衛星システム受信機における異常測定値の検出および補正ならびにアンビギュイティの決定
全地球的航法システムはローバ内に配置された第1のナビゲーション受信機と、基地局内に配置された第2のナビゲーション受信機とを備える。2つの受信機において受信された衛星信号の測定値の一重位相差が算出され、観測モデルから導き出された一重位相差と比較される。ローバの出力位置を判定し、かつ、整数値アンビギュイティを決定するための計算に先立って、異常測定値が検出され、除去される。検出基準は算出されかつ導き出された一重位相差間の残余に基づく。整数値アンビギュイティを決定するために、コレスキー情報カルマンフィルタおよびハウスホルダー変換に基づいて行われる計算が好適に適用される。1つのエポックから別のエポックへの衛星の配座状態の変化が計算の中に含まれる。 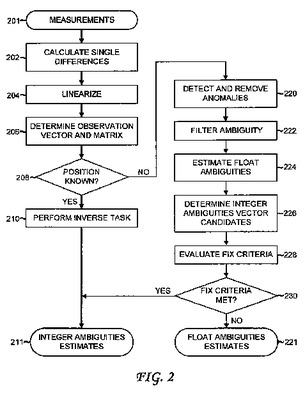 (もっと読む)
(もっと読む)
ヘディングを決定するためのシステムおよび方法
【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
事故防止監視制御システム
【課題】オペレータに危険距離に近いことを報知して回避させると共に、最悪の事態(接触事故)が発生した場合でも重大事故に拡大することを防止する事故防止監視制御システムを提供する。
【解決手段】この監視制御装置7は、GPS衛星5からの信号に基づいて得られたクレーン車8に係る位置情報を取得する位置情報取得手段11と、クレーン車8の所定範囲内に位置する送電線に係る情報を格納した送電線情報格納手段12と、クレーン車8に係る位置情報と送電線3に係る位置情報とを照合する照合手段13と、照合手段13による照合結果に基づいてクレーン車8と送電線3との離隔距離を判定する離隔距離判定手段14と、離隔距離判定手段14により判定された離隔距離が所定の安全距離よりも短い場合にクレーン車8に対して警報を発する警報発信手段15と、自動復旧装置の使用の可否を制御する自動復旧装置制御手段18と、を備えて構成されている。
(もっと読む)
低コスト1周波GNSS受信機を使用するセンチメートル精度の測位方法
全地球測位システムは、視野内のGNSS衛星群に対応する位置及び搬送波位相測定値群を求める基地局GNSS受信機と、移動局GNSS受信機とを含み、移動局GNSS受信機は1周波受信機であり、この1周波受信機は、複数のGNSS衛星から1つの周波数帯で、捕捉窓の長さに亘って送信されるGNSS衛星信号を捕捉し、複数のGNSS衛星は、搬送波位相データセットを供給するために十分多くの衛星であり、搬送波位相データセットから、関連する搬送波位相整数アンビギュイティの解が多元決定される。システムはこれらの捕捉信号から、視野内のこれらの衛星、コード位相遅延群及び関連する位置不確定性に関連する探索空間を決定する。システムはこれらの搬送波位相整数アンビギュイティを、所定の閾値を上回る信号電力値に関連する搬送波位相二重差測定値群を使用して決定する。システムはこれらの搬送波位相整数アンビギュイティを、捕捉窓の長さに亘って唯一の解セットとして決定し、移動局GNSS受信機の位置を数センチメートル以内の精度で、決定された搬送波位相測定値群を使用して求める。  (もっと読む)
(もっと読む)
測位装置及びプログラム
【課題】擬似距離誤差を精度良く算出して、受信位置を精度良く算出できるようにする。
【解決手段】測位演算部26によって、複数の測位衛星の擬似距離に基づいて、測位衛星の組み合わせ毎に、受信位置を算出する。高度誤差算出部30によって、測位衛星の組み合わせ毎に、高さ誤差を算出する。正常衛星選択部32によって、正常な測位衛星を4つ選択する。観測誤差算出部34は、測位衛星の組み合わせ毎の高さ誤差と擬似距離誤差との関係式、及び正常な測位衛星についての高さ誤差と擬似距離誤差との関係式を含む連立方程式を解くことにより、複数の測位衛星の擬似距離誤差を算出する。誤差補正測位演算部36によって、算出された複数の測位衛星の各々の擬似距離誤差を用いて、受信位置を算出する。
(もっと読む)
101 - 120 / 843
[ Back to top ]