
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
121 - 140 / 843
ナビゲーションシステム間の時間関係情報を推定するための方法および装置
少なくとも1つの推定時間関係パラメータを使用する位置/速度推定プロセスを採用することによって、ファーストタイムツーフィックスをできるだけ低減するために、および/または場合によっては、デバイスのパフォーマンスまたは効率を高めるために様々な電子デバイス中に実装され得る方法および装置を提供する。 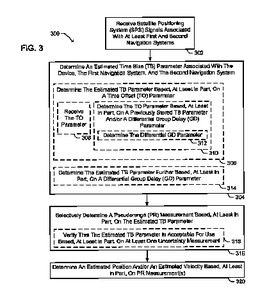 (もっと読む)
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
GPSレシーバ及びナビゲーションシステム

【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
位置推定システム及び位置推定方法
【課題】送信装置から無線信号を送信し、無線信号の受信レベルを複数地点で観測することによって送信装置の位置を推定する位置推定システムにおいて、推定精度を向上し、また、演算処理の軽減を図る。
【解決手段】受信装置12_11〜12_MNMは、送信装置11からの無線信号を受信し、その受信レベルを複数地点で観測する。平均化部131は、無線信号の波長の1倍以上の範囲の観測点を受信群とし、各観測点で観測された受群毎の観測点の平均化位置情報とを用いて、送信装置11の位置を推定する。波長の1倍以上の範囲で受信レベルの平均化を行うと、伝搬減衰の瞬時変動の項が0dBとなり、受信レベル間の相関が0となる。これにより、レイリー分布のばらつきや、受信レベルの相関信レベルを平均化する。送信位置推定部132は、受信群毎の平均化受信レベルと、受信性による推定精度の低下を防げる。
(もっと読む)
位置算出装置、位置算出方法及び位置算出プログラム
【課題】 局所領域ごとに算出された位置座標を1つの座標系に統合する。
【解決手段】 位置算出装置20の局所座標算出部230は、それぞれ複数のセンサから構成される複数の局所領域を検出し、各センサと送受信端末10との間の距離に基づいて、局所領域それぞれにおいて、当該局所領域を構成する複数のセンサの位置座標を算出する。統合領域抽出部241は、複数の局所領域のうち、所定数のセンサを共有する2つ以上の局所領域を、互いに統合可能な領域として抽出する。統合処理部242は、抽出された局所領域それぞれにおいて、センサ間距離及びセンサ間距離の信頼度を算出し、センサ間距離の信頼度によって重み付けを行なって重み付け補正後のセンサ間距離を算出し、前記重み付け補正後のセンサ間距離の加重平均に基づいて、局所領域を統合した座標系における各センサの位置座標を算出する。
(もっと読む)
走行リンク確定装置及びリンク旅行時間算出装置
【課題】確定リンクが連続しない不連続区間が生じたときでも、不連続区間を精度良く補間する。
【解決手段】リンクマッチ処理部31は、リンク単位で位置座標が定義されている地図データと、異なる時刻における移動体位置座標を含む移動体位置データとを比較して、各移動体位置座標に対する一または複数の候補リンクを抽出する。走行リンク確定部33は、一または複数の候補リンクの中から、一のリンクを確定リンクとして抽出する。補間処理部35は、深度がN(Nは3以上の自然数)以下で不連続区間を結ぶ補間経路が唯一存在し、かつ、その唯一の補間経路の深度がN−2以下であれば、その唯一の補間経路を確定リンクとして不連続区間を補間する。
(もっと読む)
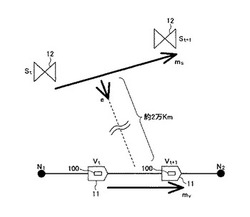
無線測位方法
受信ノードで送信ノードとの距離を求めて位置を測位する方法であって、送信ノードから測位信号を受信して遅延タブを測定し、遅延タブを用いて受信ノードと送信ノードとの間の距離を臨時に決定し、基準距離と比較した後、伝播遅延を用いた距離推定方法および遅延拡散を用いた距離推定方法のいずれか1つを選択して最終距離を推定する。 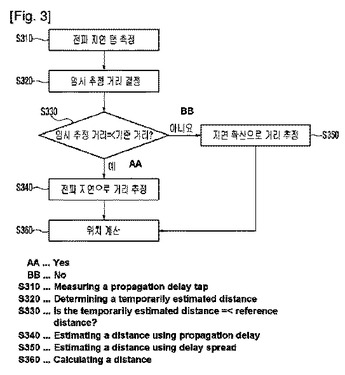 (もっと読む)
(もっと読む)
搬送波位相を使用したフィルタモデルの適用に作用する方法および装置
ナビゲーションソリューションを取得するために使用されるフィルタモデルの適用に影響を及ぼすために、様々な電子デバイスで実施され得る方法および装置が提供される。特に、複数のフィルタモデルから特定のフィルタモデルの適用を選択するために、1つまたは複数の受信信号の信号特性が使用される。 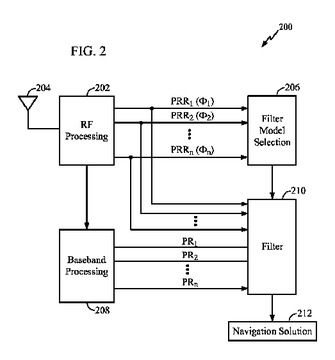 (もっと読む)
(もっと読む)
GPS受信機
【課題】アベイラビリティの低下を招くことなく、擬似距離誤差を低減して、測位精度を高めることができるGPS受信機を得ることを目的とする。
【解決手段】信号処理手段により今回計測された擬似距離変化率を用いて、その擬似距離を平滑化し、前回計測された擬似距離と今回計測された擬似距離の差分と、今回計測された擬似距離変化率との差異が、所定値より小さいかまたは該所定値と等しい場合、信号処理手段により前回計測された擬似距離、今回計測された擬似距離および今回計測された擬似距離変化率から重み係数を求め、その重み係数に応じた今回計測された擬似距離と今回計測された擬似距離変化率の重み加算を用いた平滑化を実施する平滑化手段と、
平滑化手段により平滑化された擬似距離と衛星位置特定手段により特定されたGPS衛星の位置から現在位置を測位する。
(もっと読む)
移動を検出する方法および無線装置
【解決手段】本発明は、少なくとも一つの固定送信機から少なくとも一つの受信機に無線信号を送信し、受信信号を評価して移動を決定する、少なくとも一つの受信機の移動を検出する方法および無線装置に関する。無線信号は、高周波搬送波上に変調された規定ビットシーケンスとして設計され、受信機によって復調されて受信シーケンスを形成し、基準シーケンスとして記憶された規定ビットシーケンスとの相関が取られて一致が判定される。相関によって定まる一致またはエラーに応じて、受信した無線信号の受信電界強度の品質指標が求められる。規定ビットシーケンスを有する無線信号は、少なくとも二つの送信電力を有する送信機から一シーケンス内に送信される。このシーケンスが時間間隔で繰り返され、受信したシーケンスの品質指標が評価されて送信機に対する受信機の移動が決定される。 (もっと読む)
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】不適切な信号が、移動局の位置決定の測定値として、誤って識別されないようにする。
【解決手段】移動局で受信された位置決定信号から、移動局についての位置決定のための複数の測定値を決定し、複数の測定値間の整合性を決定する前に、複数の確率推定を生成するために、複数の測定値の各々が誤警報である確率を推定する。測定値を使用して移動局の位置を決定する。そして推定した誤警報確率インジケータを使用して、決定した位置が受け入れ可能か判断する。
(もっと読む)
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】不適切な信号が、移動局の位置決定の測定値として、誤って識別されないようにする。
【解決手段】移動局で受信された位置決定信号から、移動局についての位置決定のための複数の測定値を決定し、複数の測定値間の整合性を決定する前に、複数の確率推定を生成するために、複数の測定値の各々が誤警報である確率を推定する。測定値を使用して移動局の位置を決定する。そして推定した誤警報確率インジケータを使用して、決定した位置が受け入れ可能か判断する。
(もっと読む)
対象物を追跡するためのシステム及び方法
【解決手段】対象物が、少なくとも1つのマッピングされた電界領域内に位置する。正確かつ高速に複数の対象物を柔軟に支持する構成設定を通して、位置追跡の環境がマッピングされる。ホストおよびリピータデバイスが、空間を規定する多面体の頂点に配置される。多面体の辺の長さは、2つのデバイス間の修正された物理的距離として規定される。このモーフィングは、システムによって測定されたパラメータまたはシステムに入力されたパラメータを用いる。モーフィングされた三次元サブゾーンは、頂点にあるデバイスによって規定された多面体の体積内に規定される。 (もっと読む)
測位システム及び制御方法
【課題】移動局無線機12の測位において、各地点の電界強度を事前に実測すること及びビーコン送信機11−移動局無線機12間の距離を計算することを省略し、かつビーコン送信機11の配備数を少なくする。
【解決手段】複数のビーコン送信機11は、測位空間19内にほぼ等密度で分布して配備され、自機のIDを含むビーコンを周囲へ発射する。移動局無線機12のビーコン受信機13は、近辺のビーコン送信機11からのビーコンを受信して、その電界強度を測定する。基地局15では、移動局無線機12からビーコン情報を受信し(S51)、ビーコン送信位置情報テーブルを参照して、ビーコン送信位置を求める(S52)。さらに、各ビーコンについて送信位置と移動局無線機12における電界強度の比とに基づき移動局無線機12の現在位置を算出する(S53)。
(もっと読む)
1つ以上の基地局に関して無線移動装置の位置を推定すること
【課題】複数の基地局を持っている通信網において移動装置の位置を推定する。
【解決手段】第1の方法は、移動装置が基地局のうちの1つのみと通信することができるエリアを決定することを含んでいる。そのエリア内の平均位置が計算され、推定として使用される。第2の方法は移動装置が2つの基地局のオーバーラップしているカバレージエリア40内にあるエリアを決定することを含んでいる。各基地局から移動装置によって受信された信号の到着の相対時間差が一定の距離点の軌跡が決定される。移動装置で、1つの基地局の第1および第2のセクター間の相対的な信号電力に基づいた角度θを有する線が、軌跡と交差する点が決定され、移動装置の位置が推定される。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
【課題】無線装置が、遠距離位置追跡を可能にするためのジオロケーションおよび局所的位置追跡を可能にするための局所的位置技術を利用することにより、目標物に関する位置データを提供する。
【解決手段】ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。
(もっと読む)
動き監視システム
【課題】監視エリアが広範囲、対象物が複数になると比較対象となるデータ量が増加する。
【解決手段】監視対象1に取り付けた無線IDタグ5は一定時間毎にパイロット信号を送信する。監視エリアに亘りメッシュ状に配置センサメッシュネットワーク2を構成するセンサノード2aは、パイロット信号を受信して受信レベルおよびID情報を自己のIPアドレスと共に送信する。集中管理装置3は、各センサノード2aから送信されてくる情報を処理して監視対象1の位置を測定する。そして、集中管理装置3は、センサノード2aにおける送受信を停止させるためのスリープモードと、センサノードにおける送受信を機能させるための測定モードを受信レベルに応じて各センサノード2aに設定する。
(もっと読む)
表示装置を備えるシステム、端末及び表示装置の検索方法
【課題】端末との距離及び画面の向きの関係に基づいて、利用者が視聴している表示装置を検索する方法を提供する。
【解決手段】コンテンツを表示する表示画面を備える表示装置と、前記表示装置を管理する検索装置と、を備えるシステムにおいて、前記検索装置は、前記表示装置の位置、前記表示画面の法線ベクトル、前記表示装置へアクセスするための情報を含む表示装置情報を管理し、端末の位置及び当該端末の向きを示す方向ベクトルを含む位置情報を前記端末から受信した後に、前記表示装置情報を参照して、前記位置情報を送信した端末と前記表示装置情報によって示される表示装置との距離、及び、前記方向ベクトルと前記法線ベクトルとの角度を計算し、前記計算された距離及び角度に基づいて尤度を計算する。
(もっと読む)
121 - 140 / 843
[ Back to top ]