
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
141 - 160 / 843
信号受信装置、信号受信装置の制御方法及びコンピュータプログラム
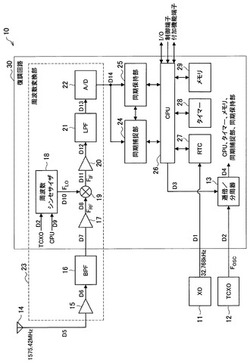
【課題】1つの位相比較器及びループフィルタを複数の同期保持チャネルで共有することで、同期保持チャネルの増加に伴う回路規模の増大を抑えることが可能な信号受信装置を提供すること。
【解決手段】所定の周波数のキャリアを生成する信号生成器を含む位相同期ループ部と、衛星から受信した信号のキャリアと信号生成器が生成したキャリアとの位相差を検出して出力する1以上の位相比較器と、位相比較器が出力する位相差情報からノイズを除去して所望のループの応答を実現する1以上のループフィルタと、を備え、同時に追跡可能な最大衛星数N(Nは2以上)に対して、位相比較器及びループフィルタの数MはN>Mである、信号受信装置が提供される。
(もっと読む)
GPS衛星信号の品質監視機能を有するGPS衛星信号品質監視方法及びGPS衛星信号の品質監視機能を備えたGPS衛星信号品質監視装置

【課題】単独のGPS受信機により、GPS衛星の故障による信号歪みを検出するとともに、この信号歪みによりどれだけ誤差が検出されたかを実際の数値として判定するGPS衛星信号品質監視方法およびGPS衛星信号の品質監視機能を備えたGPS衛星信号品質監視装置を提供する。
【解決手段】GPS受信機内で捕捉したいGPS衛星に対応するC/Aコードを生成し、このC/Aコードと受信信号のC/Aコードとの相関をとり、追尾点における相関値を用いて左右対称でない相関点の組み合わせとすることにより不感を解消し、信号歪みをみるとともに、相関点の交点と追尾点の測距値差を求め、この信号歪みによりどれだけ誤差が検出されたかを実際の数値として判定する。
(もっと読む)
端末位置推定方法、測位データ処理方法、プロセッサ及びコンピュータ読み取り可能な媒体
少なくとも1つの固定ノードを有する無線ネットワークのカバレッジエリア内の端末の位置を推定する方法は、端末と固定ノードの何れかとの間の無線チャネルの複素周波数応答を測定し、測定された複素周波数応答の第1メトリックを表現するデータと、複数の保存されているメトリックを表現するデータとを比較することに少なくとも基づいて、端末の位置を推定するステップを有し、複数の保存されているメトリックの各々は、無線ネットワーク内の複数の異なる位置の何れかに関連し、保存されているメトリックの各々は、固定ノードの何れかとメトリックが関連している無線ネットワーク内の位置との間で測定された複素周波数応答である。 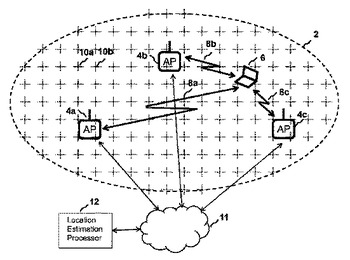 (もっと読む)
(もっと読む)
モバイルデバイスの位置の決定方法
【課題】衛星信号から週番号を抽出する必要なく、モバイルデバイスの位置を決定する。
【解決手段】前記システム時刻に依存する前記衛星の軌道を仮定して、衛星から受信する信号からモバイルデバイスの位置を規定する一連のデバイスパラメータを決定する方法であって、複数の週番号候補の1つを有するシステム時刻によって、それぞれ実行され、正当な週番号を複数の週番号候補の中から選択し、決定された一連のデバイスパラメータとして指定される正当な週番号に基づいて前記システムの式を解き、ここで、正当な週番号の選択は、解法アルゴリズムのアプリケーションが解を生じなかった少なくともいくつかの週番号を削除することによって、実行され、残りのいずれかの週番号に偏差値を割り当てて、偏差値に従って、残りの週番号の中から正当な週番号を選択する、ことを特徴とする方法。
(もっと読む)
受信機
【課題】別途取得した航法データを用いて、追尾可否の判断を行う受信機を提供することにある。
【解決手段】受信機は、例えば、GPS受信機等に適用することができる。当該受信機は、受信手段が衛星から衛星信号を受信し、周波数変換手段が上記衛星信号を中間周波数に変換し、積算手段が参照用信号と上記変換信号とを積算することにより、積算信号を出力し、基準信号生成手段が、所定周波数の基準信号を生成し、追尾判定用相関値出力手段が積算信号と基準信号との相関値である追尾判定用相関値を出力する。予測データ取得手段は、航法データの予測データを取得する。追尾判定手段は、追尾判定用相関値と予測データとを比較する比較処理を行い、比較処理の結果に基づいて追尾判定を行う。
(もっと読む)
状態推定装置、方法、プログラム及びその記録媒体
【課題】未知の外乱がある環境で、対象物の位置等の状態(位置)の推定を高精度で行う。
【解決手段】状態パーティクルを用いて状態の推定を行うモンテカルロ・ローカリゼーション法を応用して、さらに変位量パーティクルを用いる。変位量パーティクルを用いることにより、対象物に与えられる外乱を考慮して対象物の変位量を推定することが可能となり、対象物の状態の推定を高精度に行うことができる。また、誘拐度Eを定義して、誘拐度Eが低い場合には、移動誤差を拡大することで状態パーティクルの存在範囲を広げる処理を行う。
(もっと読む)
測位装置、測位方法及び測位プログラム
【課題】GPS衛星から送信された測位信号を用いることなく、準天頂衛星と静止衛星とから送信された測位信号を用いて、高精度に測位することを目的とする。
【解決手段】測位装置は、準天頂衛星11と静止衛星12とから受信した測位信号の伝播時間と、地上局13から送信されたレンジング信号を用いて計測された準天頂衛星11の位置と、地上局13から送信されたレンジング信号と準天頂衛星11から送信されたレンジング信号とを用いて計測された静止衛星12の位置とに基づき、測位する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させることのできる観測誤差の新たな設定方法を提案すること。
【解決手段】GPS衛星から受信したGPS衛星信号の受信周波数及びコード位相をメジャメントとし、このメジャメントを観測値として用いて、カルマンフィルターの理論に基づく位置算出処理を行って位置を算出する。位置算出処理では、最新のメジャメント観測値と最新のメジャメント予測値との差で表される最新観測予測差値(第1のメジャメントパラメーターの値)を算出し、算出した最新観測予測差値を用いて、カルマンフィルターの補正処理に使用する観測誤差行列「R」を設定する。
(もっと読む)
電波発射源標定装置
【課題】電波発射源が静止していれば、電波発射源の位置を推定して表示し、電波発射源が移動していれば、電波発射源の移動経路を推定して表示することができるようにする。
【解決手段】静止/移動判定部3により電波発射源ESが静止していると判定された場合、静止位置推定部4がヒストグラムの中で最も密度の高い座標が示す位置が、電波発射源ESが静止している位置であると推定し、静止/移動判定部3により電波発射源ESが移動していると判定された場合、移動経路推定部5が方位測定部1から出力された複数の方位線の情報と予め設定された電波発射源ESの推定位置及び推定移動速度から、電波発射源ESの移動経路を推定する。
(もっと読む)
測位装置
【課題】到来時間差とドップラー周波数差を正しく計算し、干渉局を位置評定することができる測位装置を得る。
【解決手段】正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3とを備える。
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
測位装置
【課題】マルチパスなどの衛星信号に対する悪影響を状況に応じて適切に除去できるようにして、的確な測位を行えるようにする。
【解決手段】アナログ部3A,3B,3Cにおいては、衛星信号に含まれるよけいな帯域外のノイズ成分をカットするフィルタリング処理を行うときに絞り込む帯域の幅が、アナログ部3A、アナログ部3B、アナログ部3Cの順に漸次広くなるように設定されている。そして、各デジタル信号処理部4は、アナログ部3A,3B,3Cのうちいずれか一つを選択して、その選択したアナログ部の処理した衛星信号を使用する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させることのできる観測誤差の新たな設定方法を提案すること。
【解決手段】GPS衛星から受信したGPS衛星信号の受信周波数及びコード位相をメジャメントとし、このメジャメントを観測値として用いて、カルマンフィルターの理論に基づく位置算出処理を行って位置を算出する。位置算出処理では、最新のメジャメント観測値と最新のメジャメント予測値との差で表される最新観測予測差値(第1のメジャメントパラメーターの値)を算出し、算出した最新観測予測差値を用いて、カルマンフィルターの補正処理に使用する観測誤差行列「R」を設定する。
(もっと読む)
方位および位置決めシステム
本システムは、方位および位置が要求され得る第1ノード(CS1、CS2)のクラスタおよび、直接の見通し線を共有する前記第1ノードの相対的な方位および位置を決定するための計測ノードと呼ばれる少なくとも1つのノード(FN1、FN2、...)から成り、各ノードがそれらの送信側および受信側で受信波および送信波の様々な偏波を伴うMIMOプロセスに基づいて動作する無線局(11、12、13...)を有する。無線局は、・受信無線局が4つの偏波MIMO行列を推定できるように、送信側での偏波モードの選択およびその選択された偏波モードでのパイロット時空ブロックコードの送信;・受信機側での偏波モードの選択および受信した時空信号をその送信された時空ブロックと照合することによる4つの偏波MIMOチャネル行列の推定;・各クラスタ内の第1ノードの位置および方位の別々の推定;・マルチパス信号の寄与を同偏波MIMOチャネル行列から除去するための4つの推定された偏波MIMOチャネル行列の結合;・受信機側で衝突マルチパス信号を特性化する方位角および仰角ならびに送信機側で発信マルチパス信号を特性化する方位角および仰角を推定するための直交偏波チャネルでの推定されたMIMOチャネル行列の使用、を実行する。 (もっと読む)
改善された測位方法
セルラ通信システムにおいて、位置決定用の支援データを提供するための、改善されたクラスタ化を行う方法において、複数のポイントを含む複数のクラスタを提供し(S10)、当該複数のポイントが、高精度基準測定の結果であり、当該複数のクラスタのそれぞれに含まれる当該複数のポイントが、同一かつ固有のフィンガープリント・タグを有し、予め定められた閾値より少ない数のポイントを含む対象クラスタを特定するステップ(S20)。最後に、増加した数の高精度基準測定値を有する統合されたクラスタを提供するために、当該対象クラスタを、提供された複数のクラスタのうちの、少なくとも1つの選択された隣接クラスタと統合する(S30)。 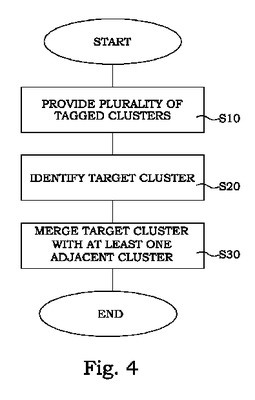 (もっと読む)
(もっと読む)
移動体用測位装置
【課題】疑似距離の異常に関する判定をより正確に行なうこと。
【解決手段】複数の衛星から送信される衛星電波を用いて該複数の衛星と移動体との疑似距離を算出することにより、該移動体の位置を算出する位置演算手段と、前記衛星電波から把握される衛星の位置と、前記位置演算手段又は他の手段により算出された前記移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、を備え、前記視線ベクトル算出手段により算出された視線ベクトルと、前記リンクのうち移動体が存すると推定されるリンクと、のなす角度が所定角度を超える衛星について、前記地図データを用いたマップマッチングにより把握される前記移動体の位置を用いて、前記位置演算手段が算出する疑似距離の異常に関する判定を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
端末位置検出システム及び船員位置管理システム
【課題】無線LANによって端末位置を検出する端末位置検出システムにおいて、様々な原因で生じる検出位置精度の低下を抑制する。
【解決手段】端末位置検出システム1が備える複数の中継機3は、検出対象者100が携帯する無線LAN端末装置2から送信される無線フレームを受信し、その受信状態に関する受信状態情報を作成する。位置演算装置4は、中継機3から取得した受信状態情報に基づいて、それぞれの無線LAN端末装置2の位置を演算により推定し、表示装置5に表示させる。ただし、推定された現在の無線LAN端末装置2の位置が、当該無線LAN端末装置2の過去の位置を含む所定範囲から外れていた場合は、推定された現在の無線LAN端末装置2の位置は誤りと判定され、表示装置5に表示されない。
(もっと読む)
測位システム、測位装置、測位方法、およびプログラム
【課題】本発明の課題は、空間上に設置する複数の受信装置の時刻を高精度に同期させたり、信号源と受信装置に単一の信号伝達経路以外のための特別な装置を設けたり、空間上に位置が既知の基準信号源を設置したりする必要なく、信号源から信号を1回放射して信号源の位置を算出できる信号源測位システムおよびその技術を提供することにある。
【解決手段】本発明は、複数のセンサを有し、前記複数のセンサが受信した信号の到着時刻を、自身の時刻源を用いて計測する計測手段と、前記計測した到着時刻を複数の計測手段から収集し、信号伝達速度、各計測手段のセンサの位置を示す位置情報及び前記各センサの到着時刻から、前記信号の信号源の位置を算出する算出手段とを有する。
(もっと読む)
測位装置、測位システム、測位方法、測位プログラム
【課題】少なくとも1つの衛星からの信号を受信できれば、正確な位置と正確な時刻とを得ることができる測位装置、測位システム、測位方法、測位プログラムを提供する。
【解決手段】高精度発振器121が発生する高精度なリファレンスクロック信号に基づいて、内部クロック発振部111が内部クロック信号を発振する。RF受信部112は、この内部クロック信号を用いて人工衛星からの衛星信号を受信時刻の記録を行いながら複数回受信する。測位演算部114は、複数回受信した衛星信号とその受信時刻とを用いて測位演算を行う。
(もっと読む)
移動体検知システム
【課題】基地局端末と被測距端末との間、又は複数の基地局端末間に存在する移動体を検知することができる移動体検知システムを得る。
【解決手段】複数の基地局端末と、1又は複数の被測距端末4とを備え、基地局端末は、被測距端末4及び/又は他の基地局端末と無線信号を授受し、無線信号の伝播遅延時間及びRSSIを求め、該伝播遅延時間及びRSSIに基づき、当該基地局端末と、被測距端末4又は他の基地局端末との間の移動体5の有無を検知するものである。
(もっと読む)
141 - 160 / 843
[ Back to top ]