
Fターム[5J062DD24]の内容
Fターム[5J062DD24]に分類される特許
201 - 220 / 225
GPS受信装置およびGPS受信装置における誤差円半径の設定方法
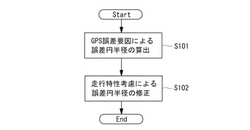
【課題】 GPSによる測位誤差を正確に反映した誤差円半径を設定できる「GPS受信装置およびGPS受信装置における誤差円半径の設定方法」を提供する。
【解決手段】 誤差円半径の設定方法は、2次元測位時に、3次元測位時の高度情報、垂直方向の測位位置精度情報、および速度情報を利用して高度誤差を予測するステップと、予測された高度誤差に基づき2次元測位時の測位誤差を示す誤差円半径を設定するステップと、2次元測位または3次元測位の測位結果に基づき移動特性を算出するステップと、算出された移動特性に基づき設定された誤差円半径を修正するステップとを有する。
(もっと読む)
補正値パラメータ生成装置、測位装置および差動衛星測位方法

【課題】 差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】 基準補正値生成局200において、収集局210は各基準局100から観測値を収集する。生成局220は各基準局100から測位衛星400に向けた仰角に基づいて各基準局100毎に補正値時刻変化率を算出すると共に、観測値に基づく各基準局100座標と既知の各基準局100座標とに基づき基準補正値を生成する。通信局230は基準補正値と補正値時刻変化率とを補正値パラメータとして移動局300に送信する。移動局300において、通信機330は補正値パラメータを受信する。受信機310は測位衛星400の測位信号を観測する。複合部320は補正値を複合する基準局100を選択して補正値パラメータを複合し、複合した補正値パラメータで複合移動局用補正値を算出する。受信機310は観測値に基づく測位の際に複合移動局用補正値で補正して測位する。
(もっと読む)
ナビゲーションシステムの予想性能の決定
一態様では、ナビゲーション補強システムの予測性能を決定する方法は、ナビゲーション補強システムの標準性能を決定すること、及び標準性能を決定することに基づいてナビゲーション補強システムの予測性能を決定することを含む。別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタ及びナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタを備える。 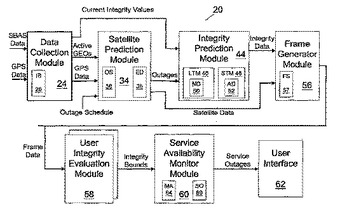 (もっと読む)
(もっと読む)
順方向リンク中継器周波数透かし入れシステム
中継器情報を有する中継された信号に透かしを入れることにより、中継器が存在する領域内の移動局の正確な位置決定を可能とする順方向リンク中継器周波数透かし入れ(FLRFWM)システムと方法。中継器は、信号が中継器を通過するときはいつも、(一意的または非一意的な)高速周波数変調波形の透かしで順方向リンク信号に透かしを入れる。移動局は、順方向リンク信号上の高速周波数透かしを検出および/または識別し、AFLTおよび/またはA−GPSシステムを用いて位置決定を行う際、ネットワーク位置決定エンティティまたは移動局の位置決定システムを支援する中継器情報を決定する。ここに説明する順方向高速周波数透かし入れシステムは、FL、AFLT、およびGPS特性への最小の影響と、良好な検出、識別および誤り検出確率と、検出/識別までの時間が短いことと、良好な検出/識別感度とを達成する。 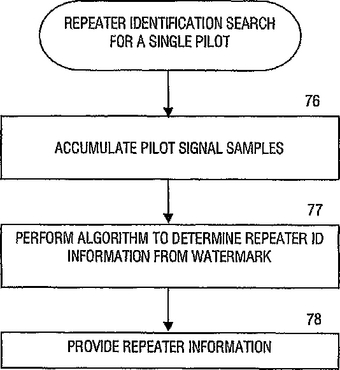 (もっと読む)
(もっと読む)
スプーフィングによる信号の矛盾の検出器
本発明は、スプーフィングの信号の矛盾の検出(SIDS)、すなわち、空間中の複数の地点で受信された信号の矛盾を利用してスプーフィングを検出することに関した方法および装置である。 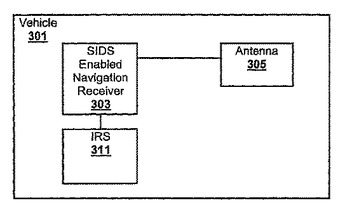 (もっと読む)
(もっと読む)
順方向リンク中継器遅延ウォータマーク入れシステム
【課題】順方向リンク中継器遅延ウォータマーク入れシステム。
【解決手段】中継器情報を有する中継器信号をウォータマーク入れすることにより、中継器が存在する領域において、移動局の正確な位置の配置を可能にさせる、順方向リンク中継器遅延ウォータマーク入れ(FLRFWM)システムおよび方法。中継器は、信号が中継器を通過する全ての時間に、(ユニークまたは非ユニーク)時間遅延変調波形ウォータマークを有する順方向リンク信号をウォータマーク入れする。移動局は、AFLTおよび/またはA−GPSシステムを使用して位置の配置を決定するネットワーク位置決定要素または移動局位置の配置システムを支援する中継器情報を決定するために、順方向リンク信号上の時間遅延ウォータマークを検出しおよび/または識別する。 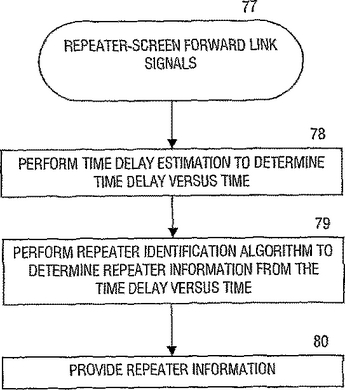 (もっと読む)
(もっと読む)
位置決定方法及び装置
本発明は、無線航法信号受信機の位置決定方法に関し、本方法は、複数の地上位置及び時間値について、無線航法信号源によって送出される信号の受信特性を、前記信号源の位置、電磁波伝搬モデル、及び各位置の環境の地形情報の関数として予測するステップ、受信機が無線航法信号を受信するステップ、受信機によって受信された信号の受信特性を測定するステップ、及び実際に測定された特性と予測特性とを処理して受信機の位置決定情報を供給するステップを含む。  (もっと読む)
(もっと読む)
所在検索システム、被検索端末装置、被検索端末装置の制御方法、被検索端末装置の制御プログラム、被検索端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】被検索端末装置の電力消費を低減させつつ、必要十分な測位精度の位置情報を提供することができる所在検索システム等を提供すること。
【解決手段】被検索端末装置20及び検索端末装置80と通信可能な管理装置50から、検索端末装置80の位置を示す検索端末位置情報を含む所在情報要求を受信する所在情報要求受信手段と、電力消費量及び測位精度が異なる複数の送信用位置情報生成手段と、検索側位置情報に示される検索端末装置80の位置と被検索側概略位置情報に示される被検索端末装置20の位置との距離が、詳細位置必要範囲内か否かを判断する詳細位置必要範囲内外判断手段と、詳細位置必要範囲内外判断手段の判断結果に基づいて、複数の送信用位置情報生成手段から一つの送信用位置情報生成手段を選択する相対位置基準送信用位置情報生成手段等を有する。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム
【課題】測位精度を確実に高くするように衛星を選択することができる測位装置等を提供すること。
【解決手段】上空衛星数情報に示される上空衛星数が前記受信チャンネルの数よりも多いか否かを判断する上空衛星数評価手段と、上空衛星数評価手段の判断結果に基づいて、すべての上空衛星から位置関連信号を受信して、各上空衛星からの位置関連信号の信号強度を示す信号強度情報を生成する信号強度情報生成手段と、信号強度情報に示される信号強度に基づいて、受信チャンネルに上空衛星を割り当てる受信チャンネル割り当て手段と、受信チャンネルによって受信した位置関連信号に基づいて、測位装置の位置の測位を行う測位手段と、を有することを特徴とする測位装置20。
(もっと読む)
GPS受信器
【課題】 各GPS衛星からの受信レベルの閾値と、衛星の相互関係に基づくDOPの閾値を適切に設定し、できる限り高精度の測位を行うことができるGPS受信器とする。
【解決手段】 測位計算部17ではオールインビュー方式でGPS衛星の信号を受信するGPS衛星信号受信部12からの各衛星の受信信号を入力し、所定の測位演算を行う。そのとき衛星の受信レベルが受信レベル閾値設定部24の設定閾値より低いため測位計算判別部20が測位を行うことができないと判別したとき、閾値変更処理部26が受信レベル閾値設定部24の閾値を徐々に緩和する。その結果測位計算ができたときには、測位計算を行った衛星の配置によってDOP値を求め、DOP閾値設定部25で設定した閾値と比較し、DOP値判別部22で閾値をクリアしていないと判別したときにはDOP閾値を徐々に緩和する。このようにして測位解が得られたときには、測位条件と共に出力する。
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
GPS受信システムおよび位置測定方法
【課題】 測位計算ができないという不都合を抑制でき、測位精度を向上させることが可能な「GPS受信システムおよび位置測定方法」を提供する。
【解決手段】 複数のGPS衛星毎に理論的な受信電界強度範囲を算出する理論的受信電界強度算出部4と、信号受信部1により実際に受信している各GPS衛星からの信号のうち、受信電界強度検出部7により検出される実際の受信電界強度が理論的な受信電界強度範囲内に入っている信号だけを用いて測位計算する測位計算部3とを設け、受信電界強度が異常で真にエラー成分の含まれる可能性のある信号だけを測位計算から排除することにより、使用可能なGPS信号の数が少なくて測位計算ができないという不都合を抑制するとともに、できるだけ広範囲に散らばったGPS衛星からの信号を使って測位計算を行うことで、幾何学的な計算による測位誤差を小さくすることができるようにする。
(もっと読む)
測位システム、端末装置、情報提供装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】測位の目的に必要な精度の位置情報を生成することによって、測位時間を短縮することができる測位システム等を提供すること。
【解決手段】情報提供装置50は、位置関連サービス情報を提供するために必要な位置情報の必要精度範囲を示す必要精度範囲情報を格納する必要精度範囲情報格納手段250等を有し、端末装置20は、情報提供装置50から必要精度範囲情報254(152)を取得する必要精度範囲情報取得手段と、測位手段によって生成した位置情報158の精度が、必要精度範囲内か否かを判断する必要精度範囲内外判断手段と、必要精度範囲内の位置情報158によって、情報提供装置50に対して位置関連サービス情報252aを要求する位置関連サービス情報要求手段と、を有することを特徴とする測位システム10。
(もっと読む)
測位信号捕捉支援ウィンドウ評価のための方法およびシステム
【課題】測位信号捕捉支援ウィンドウ評価のための方法およびシステム
【解決手段】システム及び方法はアシスト位置探索システムの測位信号捕捉支援ウィンドウの品質を検査する。捕捉支援ウィンドウの適合性は実観測に基づく移動局からの特定の位置測定の実観測に基づく知識あるいは仮想位置測定の知識を使用して検査される。基地局アルマナック管理装置は移動局測定データを捕捉支援ウィンドウ・データと比較し、ウィンドウ品質値(WQ)、或いは、ウィンドウ品質値の範囲を含む、該比較に基づく結果を記録する。捕捉支援ウィンドウの生成に使用されるソース・データは該ウィンドウ品質値に従って調整される。
(もっと読む)
移動端末および測位システム
【課題】大容量メモリの搭載、および煩雑なデータ転送処理の実行を不要としつつ、正確な測位結果を選択する。
【解決手段】測位用衛星からのGPS信号Sgに基づいて現在位置を測位して測位結果を出力するGPS処理部12と、必要数の測位用衛星を組み合わせたグループ毎に対応する測位結果をGPS処理部12に出力させると共に各グループ毎のDOP値を比較して最も正確な測位結果を選択する制御部17Aとを備え、制御部17Aは、GPS信号Sgを受信可能な測位用衛星が必要数を超えているときに、携帯端末1Aの高度を示す高度情報(気圧センサ16からのセンサ信号に基づいて演算した高度)を取得し、各グループ毎の各測位結果に含まれている高度値が高度情報に基づいて規定した許容高度範囲内である測位結果を特定し、特定した測位結果のうちのDOP値が最も小さいグループに対応する測位結果を選択する。
(もっと読む)
ナビゲーション装置
【課題】 誤差範囲の設定精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、測位位置の計算に使用された複数のGPS衛星のそれぞれの仰角値の検出と、複数のGPS衛星の重心位置の検出を行うとともに、検出した仰角と重心位置とに基づいて測位位置の誤差範囲を設定する誤差円半径計算部14と、GPS受信機2から出力された測位位置と誤差円半径計算部14によって設定された誤差範囲とを用いて現在位置の計算を行う車両位置計算部20とを備えている。
(もっと読む)
移動通信端末および位置情報利用方法
【課題】 より的確に基地局位置情報とGPS位置情報とを利用できる携帯電話機を提供すること。
【解決手段】 この携帯電話機10は、携帯電話機10をその配下に置いている少なくとも一つの基地局の位置を利用して算出される携帯電話機10の第1位置情報を取得する第1位置取得部12と、全地球測位システムを利用して携帯電話機10の第2位置情報を取得する第2位置取得部13と、第1位置情報及び第2位置情報それぞれの精度を比較する精度比較部14と、比較結果に応じて、第1位置情報又は第2位置情報を選択的に利用する位置情報利用部15と、を備え、位置情報利用部15は、精度比較部14の比較結果に係わらず第1位置情報を利用した後に、精度比較部14の比較結果に応じて、第1位置情報及び第2位置情報のいずれか精度の高い位置情報を利用する。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】前回の測位時から時間が経過している場合であっても、良好な測位精度の測位位置情報を取得するための位置情報衛星を選択することができる端末装置等を提供すること。
【解決手段】端末装置20は、上空位置情報衛星数情報に示される位置情報衛星の数が、端末装置20が位置関連信号を同時に受信することができる数である受信チャンネル数よりも多いか否かを判断する衛星数評価手段と、受信チャンネル数の位置情報衛星で構成される衛星組のすべてについて、衛星組を構成する位置情報衛星の上空における幾何学的配置によって規定される測位精度予測指標を示す測位精度予測指標情報を生成する測位精度予測指標情報生成手段と、測位精度予測指標に基づいて、最初に捕捉する前記衛星組である初期捕捉対象衛星組を選択する初期捕捉対象衛星組選択手段と、を有する。
(もっと読む)
衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステム
本発明は、ユーザの位置を決定するために、衛星(SAT1−GPSEE1〜ASATn−GPSEEn)から送信される、異なる3つの周波数の三搬送波電波信号を用いて移動体(SUR)の位置を特定するリアルタイムナビゲーションの方法に関する。方法は、エクストラワイドレーン搬送波位相曖昧さを決定する第1のステップと、長経路位相曖昧さを推定する第2のステップと、複数の周波数のうちの1つの位相曖昧さを決定する第3のステップとを含む。追加ステップの1つでは、第3のステップの間に電離層補正をリアルタイムで適用する。前記電離層補正は、地上固定基準局(REF−REFE)によって計算される前記電離層の常時更新される電離層モデルに基づき、いわゆるマスタ地上固定基準局(REFM−REFME)によって計算される測地データと組み合わせられる。本発明は、前記方法を実施するためのシステムにも関する。  (もっと読む)
(もっと読む)
衛星を用いた測位方法、測位プログラム、及びGPS受信装置
【課題】 高精度な測位をリアルタイムに行うとともに、連続的に測位結果を出力する。
【解決手段】 DGPSにより仮の解を導出し、導出した仮の解の情報を用いて、真の解が存在する第1の空間領域を求める。第1の空間領域を線形写像した第2の空間領域内に存在する所定の解を真の解となりうる解候補とし、解候補のそれぞれについて、χ二乗検定を行う。χ二乗検定の結果、解候補が1つに限定された場合に、限定された解候補を真の解し、真の解から整数サイクルを得る。
(もっと読む)
201 - 220 / 225
[ Back to top ]