
Fターム[5J062DD24]の内容
Fターム[5J062DD24]に分類される特許
61 - 80 / 225
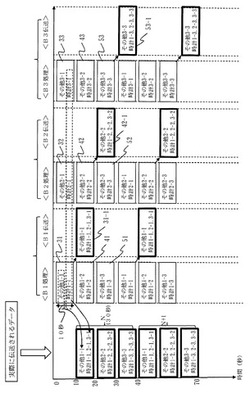
データ送信装置及びデータ送信方法及び測位装置
【課題】時間の経過と共に更新が必要な測位の補正データについて、データ送信量の低減と、より新しい補正データの提供とを両立させ、提供する補正データの精度を向上させる装置を提供する。
【解決手段】データ送信部は、それぞれの測位補強情報を伝送周期10秒で伝送する。第1計算部は、データ送信部により所定の順序に従って伝送中の測位補強情報31−1の伝送周期10秒の間に、基準点固有誤差を新たに計算する。第2計算部は、伝送中の測位補強情報31−1の伝送周期10秒の間に、それぞれの測位補強情報41〜43を新たに計算された基準点固有誤差に基づいて新たに生成する。データ送信部は、新たに生成された測位補強情報41〜43のうちの一つの測位補強情報42−1を所定の順序に従って伝送中の測位補強情報31−1の次に配信装置に伝送すると共に、所定の順序を周期的に繰り返しながら、測位補強情報を順次に前記配信装置に伝送する。
(もっと読む)
位置情報取得システム、位置情報取得装置、位置情報取得方法

【課題】機器に表示された地図をユーザが見ることなく、GPS装置によって取得された位置情報をユーザが補正することができる位置情報取得装置を提供する。
【解決手段】音声によって入力された情報を解析し、情報に含まれる目標物を特定する音声認識サーバ装置1と、特定された前記目標物に基づいて、移動通信装置によって測位された測位情報を補正する位置補正サーバ装置202とを含む位置情報取得装置を構成する。そして、位置補正サーバ装置202に、測位情報に関する誤差に基づいてユーザが存在し得る特定範囲を特定する誤差判定部301、ユーザ存在範囲特定部302と、特定範囲のうち、目標物が視認可能な範囲と重複する視認可能エリアを特定し、測位情報が示す移動通信装置の現在位置を、視認可能エリアの重心を含む範囲に補正するユーザ位置補正処理部303とを設ける。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
測位組み合わせ決定システム
【課題】目標とする測位精度を達成可能な走行環境に合わせた好適な測位組み合わせを、対象とする走行環境内での実機実験なしに選択可能とする、即ち、低コストで目標とする測位精度を達成可能な測位組み合わせを決定する。
【解決手段】ビークルで用いる複数測位手段の組み合わせを決定するシステム(1)であって、走行環境中の場所毎に決定される測位精度影響パラメータを記憶する手段(7)と、測位精度影響パラメータと複数測位手段の測位精度との関係を記憶する手段(9)と、測位精度影響パラメータと複数測位手段との対応情報を記憶する手段(6)と、走行環境における測位精度影響パラメータを取得する手段(8)と、その測位精度影響パラメータの対応情報を取得し、その対応情報に基づいて前記関係を参照して走行環境中の各位置における複数測位手段の測位精度を予測する手段(10)と、を備え、複数測位手段の組み合わせに対する測位精度を予測する。
(もっと読む)
GPS測位システム、GPS測位方法、およびGPS測位端末
【課題】高精度で且つ効率良く更に高速でGPS測位を行うことが可能なGPS測位システム、GPS測位方法、およびGPS測位端末を提供する。
【解決手段】GPS測位用のアシストデータを格納する格納部36と、格納部36に格納された格納アシストデータが有効か無効かを判断する判断部35と、格納アシストデータが有効と判断された場合に、基地局10と通信せず当該有効判断された格納アシストデータを元に、GPS測位を行うAutonomous測位部33と、格納アシストデータが無効と判断された場合に、基地局10との通信により取得されたアシストデータを元に、GPS測位を行うA-GPS測位部32と、GPS測位が成功した場合に、当該測位結果を元に、格納アシストデータを更新し、且つGPS測位が失敗した場合に、基地局10との通信により取得されたアシストデータを元に、格納アシストデータを更新する更新部37と、を備える。
(もっと読む)
単一クロックを用いた疑似衛星信号伝送装置およびそれを利用した測位システム
【課題】本発明は疑似衛星を利用して測位するシステムおよびその信号送信装置に関するもので、廉価で、かつ不必要な無線リンクの使用を減らすことができる装置およびシステムを提供する。
【解決手段】本発明の一実施形態による装置は、航法信号を送信するための疑似衛星信号送信装置で、航法用疑似衛星コードを生成して出力する4個以上の疑似衛星と、前記各疑似衛星から出力された信号を前記各疑似衛星と各々対応されて送信するアンテナと、前記各疑似衛星に同期用クロックを提供する1つの同期用クロックを含む。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
衛星からの測位データを用いた測位方法及び測位装置
【課題】測位の精度を向上させる。さらに、装置の低コスト化を実現する。
【解決手段】以下のステップを備える:
(1)測位データを供給する複数の衛星でそれぞれ構成される複数の組を用いて、複数の仮想測位点を算出するステップ;
(2)前記複数の仮想測位点から、第1空間中心を算出するステップ;
(3)前記各仮想測位点について、前記第1空間中心からの外れ距離を算出するステップ;
(4)前記外れ距離に対する、前記各衛星の責任量を算出するステップ;
(5)前記責任量が基準値以上である前記衛星(以後「マルチパス衛星」という)を判別するステップ;
(6)前記マルチパス衛星が関与する仮想測位点を除いた、前記仮想測位点を用いることにより、受信位置を算出して出力するステップ。
(もっと読む)
測位装置及びプログラム
【課題】自律航法情報等の外部データを必要とすることなく、測位精度を適切に評価する。
【解決手段】GPS受信機16から出力されたクロックバイアス誤差を含む疑似距離から、クロックバイアスBe及び受信位置を算出し、過去n点のクロックバイアスBe、またはGPS受信器から出力されるドップラー情報に基づいてクロックドリフトDを算出し、算出されたクロックドリフトDに基づいて、回帰式、またはカルマンフィルタを用いて基準クロックバイアスBsを推定する。
(もっと読む)
マルチパス信号信頼度判定方法、コード位相誤差算出方法、コード位相算出方法、位置算出方法及びマルチパス信号信頼度判定装置
【課題】マルチパス信号の善し悪しを判定する新たな仕組みを提案すること。
【解決手段】携帯電話機1は、GPS衛星から発信されたGPS衛星信号を受信した受信信号と、レプリカコード生成部により生成されたレプリカコードとを乗算する相関演算処理を行って相関値を算出する。そして、相関演算処理により求められたピーク相関値と、当該ピーク相関値を示したピーク位相からM(1≦M<2)チップ遅れた位相の相関値とを用いてPL値を算出し、算出したPL値に基づいて、受信信号がマルチパス信号である場合の当該マルチパス信号の信頼度を判定する。
(もっと読む)
マルチパス信号信頼度判定方法、コード位相誤差算出方法、コード位相算出方法、位置算出方法及びマルチパス信号信頼度判定装置
【課題】マルチパス信号の善し悪しを判定する新たな仕組みを提案すること。
【解決手段】携帯電話機1は、GPS衛星から発信されたGPS衛星信号を受信した受信信号と、レプリカコード生成部により生成されたレプリカコードとを乗算する相関演算処理を行って相関値を算出する。そして、相関演算処理により求められたピーク相関値と、当該ピーク相関値を示したピーク位相からM(1≦M<2)チップ遅れた位相の相関値とを用いてPL値を算出し、算出したPL値に基づいて、受信信号がマルチパス信号である場合の当該マルチパス信号の信頼度を判定する。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
ユーザ・プロフィールに基づく精密化した位置推定及び逆ジオコーディング
本発明は、ユーザ固有情報(210)に基づいて推定された位置を精密化すること又はさらに高めることに関する。ユーザが許可すると(302)、地理的情報は、ウェブ閲覧履歴(212)、検索履歴(214)、マップ履歴(216)、アドレス・ブック(218)、イーメール・アーカイブ(220)及びカレンダー・エントリ(222)を含む多数のユーザ関連のソースから取り出される(402)。そのような情報は、ジオコード結果セットに対して特定の物理的位置の空間インデックス(306)を作るために使用される。これから、ユーザに関連した情報から特定の位置を識別するヒート・マップが、種々の期間に対して作られる(308)。このヒート・マップは、ユーザの最初の位置推定値を精密化するために使用されることができる(512)。これは、所定のヒート・マップ内の1つ以上の位置が最初の推定値よりも正確な位置を提供できるかどうかを判断することによって行われる(516)。提供できる場合には、最良の位置が選択される。これは、ユーザに対して、向上したドライブ方向を提供するために使用できる。 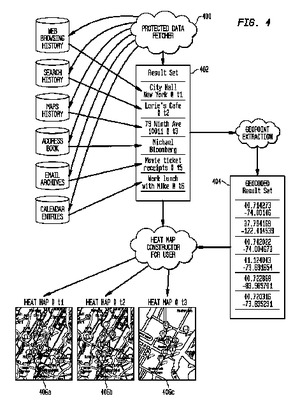 (もっと読む)
(もっと読む)
WI−FI信号による測位のための方法
本発明は、少なくとも1つの無線通信ネットワークの複数のアクセスポイントから受信された信号を使用して端末を測位するための方法に関する。端末は、まず、受信された信号から、アクセスポイントの識別子を取り出し(110)、次いで前記アクセスポイントに関連する地理的位置情報を求めて第1のデータベース(BDP)内を検索する(120)。端末の位置、または端末の測位エリアの第1の推定は、前記アクセスポイントの地理的位置情報から取得され(130)、次いで前記位置または前記測位エリアに関係する地形情報が第2のデータベース(SIG)から取り出される。最後に、端末の位置の第2の推定(150)が、このようにして取得された地形情報を使用して行われる。 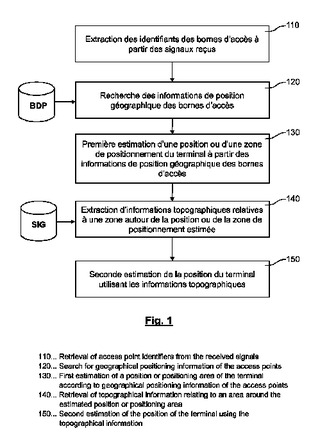 (もっと読む)
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム
【課題】サーバから配信されるGPS測位の測位誤差情報を参照し、必要な区間のみセンサと連携したGPS測位を実行する。
【解決手段】複数の位置情報取得装置が、GPS測位系を用いて位置情報を取得し、所定の条件を満たしたときに、GPS測位時の推定位置誤差情報を検出して、取得した位置情報と検出した推定位置誤差情報とをデータサーバに送信する。一方、データサーバは、複数の位置情報取得装置から位置情報と推定位置誤差情報とを受信し、地図情報を所定の単位のブロックに分割し、該受信した情報から各ブロックに対応する推定位置誤差に関する分布データベースを生成して、その生成したデータベースに基づいて、各位置情報取得装置に推定誤差分布情報を送信する。そして、複数の位置情報取得装置は、その推定誤差分布情報を受信し、その受信したGPS測位時の推定誤差分布情報に基づいて、測位方法を選択して、その選択した測位方法により、位置情報を取得する。
(もっと読む)
姿勢計測装置
【課題】アンテナ間の距離が短くなっても姿勢の測定精度を向上させることができるようにする。
【解決手段】データテーブル14には、予め求めておいた各アンテナについて各衛星からの信号の移動体座標系における到来方向ごとのカップリング誤差のデータが格納されている。誤差取得部15は、この到来方向に対応したカップリング誤差のデータをデータテーブル14から取得する。姿勢算出部17は、このカップリング誤差を除いた一重位相差又は二重位相差を用いて船舶の姿勢を算出する。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、誤マッチングから早期に回復する。
【解決手段】推測航法により求めた推測位置P1に対し、推測方位の信頼度とGPS方位の信頼度の高い方の信頼度に基づく想定方位誤差を求め、信頼度が高い方の方位と、最適候補地点に推測位置P1を補正した場合の進行方向の方位との方位差θが想定方位誤差の範囲内にない場合には推測位置P1を補正しない。推測軌跡方位の信頼度は、前回の信頼度、想定累積方位誤差、ジャイロ左右感度学習状態から、GPS方位の信頼度は、推測方位一致度、GPS速度、DOPから決定する。これにより、画面表示では最適候補地点に車両マークを移動させることで誤マッチングであっても、実際の推測位置P1は補正させず、未補正の推測位置P1を基準に次の推測位置P2を求めるので、次回以降のマッチング処理で、より早く正しい道路に車両マーク及び推測位置を復帰させることができる。
(もっと読む)
キネマティックGPSを活用した計器校正飛行試験方法
【課題】高高度領域の航空機の幾何高度を精密かつ簡易に測定して当該航空機の計器を校正する試験方法を提供する。
【解決手段】(3)飛行試験場所近傍に座標の確定した基準点を設け、ここと航空機の双方にK-GPS受信装置を装備する。(5)基準点の地上気圧(P0)及び地上気温(T0)を測定する。(6)航空機の幾何高度をK-GPS受信装置で計測する。(7)航空機と基準点の各幾何高度の差から求めた航空機の幾何高度(H)、地上気圧(P0)及び地上気温(T0)を次式(A)に代入して、飛行高度の大気気圧(P)を換算し、(8)大気気圧Pで航空機搭載ADCの大気気圧を校正して計測誤差等を補正する。P=P0×{1−0.0065H/(273.15+T0)}5.256…(A)
(もっと読む)
測位システム及び測位方法
【課題】 精度が十分でない測位方法によって得られた測位結果の精度を向上させる。
【解決手段】 測位要求端末20の位置を推定する測位サーバ10は、リファレンス端末21についての同じ位置における低精度及び高精度の測位方法による測位結果を記憶するリファレンスデータベース11と、測位要求端末20の測位結果を取得する測位結果取得部13と、測位要求端末20の測位結果によって示される位置から所定の距離にあるリファレンス端末21の測位結果に係る情報を抽出する抽出部14と、抽出された情報に基づくリファレンス端末21の2つの測位結果間の差分を用いて測位要求端末20の測位結果を補正する補正部15と、補正された測位結果を出力する出力部16とを備える。
(もっと読む)
61 - 80 / 225
[ Back to top ]