
Fターム[5J062DD24]の内容
Fターム[5J062DD24]に分類される特許
101 - 120 / 225
衛星システムに基づく正確な絶対時間伝送
一又は複数の実施形態により、衛星システムを用いて正確な絶対時間を取得するためのシステムと方法が開示される。正確な絶対時間は、例えば、減衰又は妨害を受ける環境でのナビゲーションを含む位置決めシステムの補助として使用することができる。一実施形態による、衛星から正確な絶対時間伝送を獲得する方法は、衛星から、周期的に反復するコードを含む精密時間信号を受信することと、このコードのタイミング位相を求めることと、追加的な補助情報を受信することと、タイミング位相及び追加的補助情報を使用して正確な絶対時間を求めることとを含む。  (もっと読む)
(もっと読む)
無線通信システムにおいて動作する装置の地理的位置情報の制御
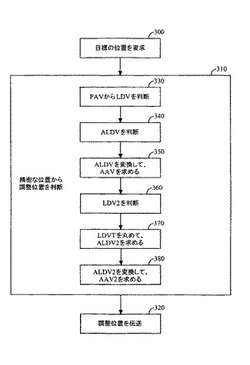
【課題】無線通信システム多くのサービスプロバイダは、移動局を非常に狭い精度範囲内に位置を特定する能力を持つ。しかし、無線通信システムの一部のユーザは、自分の精密な位置に関する情報を他の当事者に知らせることに反対する可能性は高いため、個人のプライバシーの問題に対処しうる方法を提供する。
【解決手段】要求側エンティティに報告する地理的情報の精度を制御するための方法および装置が提示される。精密な地理的位置を使用して、調整された地理的位置を判断し、精密な地理的位置ではなく、これを要求側エンティティへ伝送する。
(もっと読む)
通信端末装置及び受信方法

【課題】GPS衛星を用いた測位演算により取得した測位情報に応じて間欠受信動作させることにより、一定の測位性能を保ちつつ、測位動作に要する消費電力を低減すること。
【解決手段】RF信号受信回路202は、電力制御部209から間欠的に電力の供給を受けて、受信信号の周波数変換処理を間欠的に行う。BB信号復調処理部203は、電力制御部209から間欠的に電力の供給を受けて、受信信号の復調処理を間欠的に行う。SNR算出部205は、GPS衛星毎のSNRを算出する。衛星数測定部206は、同期確立が成功したGPS衛星の拡散符号の数を捕捉したGPS衛星の数mとする。間欠DUTY決定部208は、捕捉したm個のGPS衛星の中でSNRが良好なものから順に数えてn番目のGPS衛星のSNRに基づいて間欠受信の動作を制御する。
(もっと読む)
擬似距離評価システム及び擬似距離評価方法,プログラム
【課題】衛星測位システムでの測位計算の際にリアルタイムスムージング処理された擬似距離が異常値を示した場合に、この異常値の発生原因を迅速に特定する擬似距離評価システム及び擬似距離評価方法,擬似距離評価用プログラムを提供する。
【解決手段】測位計算に利用されるリアルタイムスムージング処理後の擬似距離から異常値を検出した場合に、この異常値と同一の観測時刻におけるポストプロセススムージング処理後の擬似距離が正常値であるか否か判定し、正常値であれば、検出した異常値の発生原因をリアルタイムスムージング処理の限界による残留ノイズであると判定するデータ処理部2を備えた。
(もっと読む)
仮想基準局の使用のサポート
【課題】仮想基準局に対して決定される信号測定値に基づく測位。
【解決手段】仮想基準局の使用をサポートするために、装置が、仮想基準局に有効なビーコン信号の仮想測定値を提供するよう求める要求を受信するとよく、この要求には、仮想基準局の所望の場所の表示が含まれる。本装置はさらに、上記の所望の場所を含む領域に関連するエンティティを決定することができる。本装置はさらに、決定されたエンティティへ前記要求を転送させることができる。
(もっと読む)
測位システム及び測位方法
【課題】測位目標が放射する電波を複数の移動体で受信しこれらの間で生成される到来時間差、到来周波数差を用いて目標の位置を特定する測位精度のよい測位システムを得る。
【解決手段】位置が未知な電波放射源1が放射する電波を受信して観測する受信手段を搭載した少なくとも2つの移動プラットフォーム3a,3bと、各移動プラットフォームからの観測情報の受信信号、移動ベクトル情報及び位置情報から受信信号の到来時間差及び到来周波数差を求め電波放射源の位置を標定する信号処理手段35と、各移動プラットフォームからの観測情報の移動ベクトル情報に基づき各移動プラットフォームにおける次の観測における最適移動方向及び最適移動速度を計算し各移動プラットフォームへそれぞれの計算結果を送り、各移動プラットフォームへ同期した移動観測を行わせる最適移動ベクトル計算手段36と、を備える。
(もっと読む)
位置検出システム
【課題】マルチパスなどの影響を低減することのできる位置検出システムを提供する。
【解決手段】複数の基地局12は、無指向性アンテナと指向性アンテナとを切り替えて機能するアンテナ部36を有し、複数の基地局12が無指向性アンテナで移動局10から送信される電波を受信した受信結果に基づいて移動局10の一次解位置を算出する一次測位部56(SC1〜4)と、基地局12の指向性アンテナをその利得が高い方向が一次解位置への方向となるように制御するアンテナ制御部35と、複数の基地局12がアンテナ制御部35によって制御された指向性アンテナで移動局10から送信される電波を受信した受信結果に基づいて移動局10の二次解位置を算出する二次測位部66(SC6〜9、SC14〜17)と、一次解位置と二次解位置とに基づいて移動局10の位置を算出する位置判断部68(SC10〜12、SC18〜21)とを有する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
測位システム
【課題】ジッタによる影響を低減し、精度のよい測位を行う。
【解決手段】測位システム8は、電波信号を送受信する移動局10と、電波信号を送受信する基地局12A〜Dと、予め算出された、受信信号の時間分散と受信信号強度との相関を格納保持した記憶部45とを有する。移動局10は、測距用電波信号に先立ち調整用電波信号を送信し、基地局12A〜Dは、調整用電波信号の受信信号強度に応じて、上記相関に基づき、移動局10からの測距用電波信号の出力制御指示信号を送信し、移動局10は、出力制御指示信号に対応した出力値で測距用電波信号を送信する。
(もっと読む)
測位システム、基地局、及び移動局
【課題】ジッタによる測距への影響を低減し、測距精度を向上する。
【解決手段】測位システム8は、測距用電波信号を複数回送信する移動局10と、送信された測距用電波信号を受信する基地局12A〜Dと、予め算出された、受信信号の時間分散と受信信号強度との相関を格納保持した記憶部45とを有し、複数回の測距用電波信号の送信時に、各回の測距用電波信号が相関上において互いに異なる測定点となるように異点化処理し、基地局12A〜Dで複数回受信した測距用電波信号のうち、記憶部45に記憶された相関に応じて選択された測距用電波信号に基づき、移動局10から基地局12A〜Dまでの測距処理を行う。
(もっと読む)
GPSレシーバ
【課題】初回測位の精度が低い場合であってもその後の測定位置の精度低下を有効に避けることができるGPSレシーバを提供する。
【解決手段】GPS測位の結果に基づいてGPSレシーバが現在位置し得る第一の範囲を推定する現在位置推定手段と、第一の範囲に基づいて、過去のある時点でGPSレシーバが位置し得た第二の範囲を推定する過去位置推定手段と、過去のある時点のGPS測位で計算された過去測定位置が第二の範囲に含まれるか否かを判定する過去測定位置判定手段とを備え、過去測定位置が第二の範囲に含まれない場合には、推定位置の計算に該過去測定位置を使用しないようにGPSレシーバを構成する。
(もっと読む)
位置情報処理装置、位置情報処理プログラムおよび移動体端末
【課題】信頼性の高い測位情報を適切に選択することを課題とする。
【解決手段】測位情報の信頼性の度合いを示す信頼性指数を、移動体端末に装着されたGPS受信部によって測位された測位情報に関して算出する。また、移動体端末に装着された自律航法測位部によって測位された測位情報を用いて累積移動距離を算出し、当該累積移動距離を用いることで、信頼性指数を、当該自律航法測位部によって測位された測位情報に関して算出する。そして、信頼性指数が示す信頼性の度合いについて、いずれが高いかを比較する。比較した結果、信頼性の度合いが高いとされた信頼性指数に対応する測位情報を、位置情報の導出に用いる測位情報として選択する。
(もっと読む)
位置・時刻算出装置および時計
【課題】 無駄な電力の消費を抑えて、適切な測位を実現する。
【解決手段】 GPS制御部37は、電波を取得可能なGPS衛星数に基づいて、測位モードを決定する。GPS制御部37は、M個のGPS衛星にて測位する2次元測位モード、或いは、M+1個以上のGPS衛星にて測位する3次元測位モードの何れかの測位モードとするかを決定するために、M+1個以上のGPS衛星による3次元測位による、GPS衛星の配置状態の良好度を示す第1のPDOP値と、M個のGPS衛星による2次元測位による、GPS衛星の配置状態の良好度を示す第2のPDOP値を算出し、第1のPDOP値と第2のPDOP値との間の差異が一定範囲であれば、測位モードを2次元測位モードと決定する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
移動通信端末
【課題】無線通信ネットワークの圏内から圏外に移動したときでもGPS機能を発揮し得る移動通信端末を提供する。
【解決手段】移動通信端末1では、GPS受信部16,17は、内蔵GPSアンテナ11Gを介して衛星電波を受信し、この衛星電波に基づいてGPS信号を生成する。接続検出部18は、外付けGPSアンテナ2がコネクタ15に接続された状態を検出する。このとき、GPS処理部14Aは、スタンドアロン測位モードの状態をオフからオンに切り替え、このスタンドアロン測位モードに従ってGPS信号を捕捉し、当該捕捉結果に基づいて測位演算を実行し得る。
(もっと読む)
GPS受信装置及びそれを用いた携帯端末
【課題】GPS信号受信装置において、TCXOの高精度化以外の方法によって温度変化による測位成功率の低下を抑制すると共に、弱電界環境における特性を改善する。
【解決手段】ホスト12は、TCXO6に内蔵された温度センサにより検出された周囲雰囲気温度を示す温度データを入力として受け、CPU122がROM121に予め記録されているLNA10の温度補正情報のうち、入力温度データに対応する温度補正情報を読み出し、その読み出した温度補正情報に基づいたゲインコントロール信号を生成して、LNA10に供給してその利得を可変制御する。これにより、温度センサにより検出されたTCXO6の周囲雰囲気温度が変化しても、可変利得型LNA10から出力される増幅後GPS信号の変動が最小限に抑圧される。この結果、温度変化による測位成功率の低下を抑制することができる。
(もっと読む)
GNSS受信装置及びそれを用いた運転支援装置
【課題】マルチパスのある環境でも位置測位精度の誤差の少ないGNSS測位を行うことができるGNSS受信装置及びそれを用いた運転支援装置を提供する。
【解決手段】GNSS衛星から送信される電波を右旋偏波用アンテナ10と左旋偏波用アンテナ20で受信し、受信した電波の電界強度を選択処理部30で比較し、比較した電波の電界強度のうち、GNSS衛星から送信される電波と同じ右旋偏波用アンテナ10で受信した電波の電界強度が、左旋偏波用アンテナ20で受信した電波の電界強度より大きい場合に、右旋偏波用アンテナで受信した電波を測位に用い、小さい場合には、測位に用いない。さらに、右旋偏波用アンテナで受信した電波の電界強度が所定の値以上である場合にのみ、右旋偏波用アンテナで受信した電波を測位に用い、受信した電波の電界強度が所定の値より小さい場合には、受信した電波を測位に用いない。
(もっと読む)
相関演算処理実行方法、プログラム、制御回路、信号処理回路及び測位装置
【課題】省電力動作(間欠測位)を行いつつ、相関演算処理内容が異なる複数の測位モードを並行実行する場合に生じる測位誤差を低減すること。
【解決手段】省電力動作では、屋内/屋外モードの対象期間Ti,To(Ti=To)に等しい周期でON/OFF期間が繰り返される。そして、屋外モードと屋内モードとは、対象期間Ti,Toを1/2ずつずらして並行実行されるとともに、ON期間の中間時点の間隔が屋内モードの対象期間Tiの開始/終了時点に一致し、OFF期間の中間時点の間隔が屋外モードの対象期間Toの開始/終了時点に一致するように制御される。
(もっと読む)
コード位相誤差推定方法、コード位相算出方法、プログラム、コード位相誤差推定装置及びコード位相算出装置
【課題】演算量を増加させたり、回路規模を増大させることなく、受信信号がマルチパス信号である場合のコード位相の誤差の補正を適切に行うこと。
【解決手段】受信信号に対する相関演算結果をもとに、Punctual位相の相関値と、Punctual位相からN(0<N<1)チップだけ進んだ位相での相関値との比率であるPE値を算出する。このPE値は、現在追跡しているコード位相(Punctual位相)と実際のピーク位相との誤差ERRとの間には、時間経過に対する増減の方向が略一致するという関係がある。このため、受信信号がマルチパス信号であると判定された場合には、PE値をもとに誤差ERRを算出し、算出した誤差ERRを用いてPunctual位相を補正する。
(もっと読む)
101 - 120 / 225
[ Back to top ]