
Fターム[5J062DD25]の内容
Fターム[5J062DD25]に分類される特許
1 - 20 / 233
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
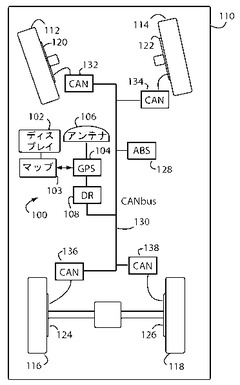
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム

【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
(もっと読む)
GPS装置を位置決めするシステムおよび方法
【課題】GPS装置の正しい位置を、予め定められた選択すべき位置のセットから決定するシステムと方法を提供する。
【解決手段】目視可能なGPS衛星1および予め定められた代替え位置の既知位置に基づいて、各衛星と各位置との間の理論的距離および/またはその距離の差を決定する。これらの距離は、予め定められた代替え位置のなかから正しい位置を選択するための、GPS装置5のアンテナ3と各GPS衛星の間の距離6の測定値に関連がある。貨物置場における予め定められたコンテナスロットを識別するシステムおよび方法も開示される。
(もっと読む)
情報処理装置、情報処理方法、並びにプログラム
【課題】精度を向上させた位置情報の記憶を行う。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
(もっと読む)
走行軌跡記憶装置
【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
移動体回転半径測定装置及び方法
【課題】移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供すること。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
(もっと読む)
多重測位を用いた端末の測位装置及び方法
【課題】測位誤差を減らすと同時に、より強靭な測位結果を提供できる、多重測位を用いた端末の測位装置を提供する。
【解決手段】複数の測位方法を用いて測位を行う複数の測位部それぞれから端末に及ぼす磁場に基づいて前記端末の第1位置を推定する多重測位部と、前記端末の推定された第1位置に基づいて前記端末の第2位置を決定する位置決定部とを備える。好ましくは、複数の測位部各々に対する初期条件(例えば、測位開始時間及び測位方法各々の初期パラメータ)を制御することによって、様々な地域で同一又は類似の磁場の大きさ、パターン及び方向が連続しても端末の位置をより正確に測定できる。
(もっと読む)
端末装置
【課題】従来、端末装置が存在する領域を精度高く判断できなかった。
【解決手段】自身が存在する領域が第一領域であるか、第一領域とは異なる第二領域であるかを判断する端末装置であって、1または2以上の各測位衛星から信号を受信する信号受信部と、前記信号受信部が受信した2以上の信号を代表する値である代表値を算出する代表値算出部と、前記信号受信部が受信した2以上の信号の分散具合を示す値である分散具合値を算出する分散具合値算出部と、前記代表値および前記分散具合値を用いて、端末装置が第一領域に存在するか、第二領域に存在するかを判断し、判断結果を取得する判断部と、前記判断部が取得した判断結果を出力する出力部とを具備する端末装置により、端末装置が存在する領域を精度高く判断できる。
(もっと読む)
移動無線ネットワークにおける動的な測位要求処理
【課題】移動局の位置決定を強化する、移動無線ネットワークにおける動的な測位要求処理を提供する。
【解決手段】ネットワーク正確度と、ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、ネットワークにおいて、選択された正確度およびネットワーク応答時間を具備する測位要求メッセージ120を送信することと、および、測位要求メッセージに応じる位置データを具備する測位応答メッセージ122を受信する。
(もっと読む)
測位信号捕捉支援ウィンドウ評価のための方法およびシステム
【課題】測位信号捕捉支援ウィンドウ評価のための方法およびシステムの提供。
【解決手段】アシスト位置探索システムの測位信号捕捉支援ウィンドウの品質を検査する。捕捉支援ウィンドウの適合性は実観測に基づく移動局10からの特定の位置測定の実観測に基づく知識あるいは仮想位置測定の知識を使用して検査される。基地局アルマナック管理装置BSAは移動局測定データを捕捉支援ウィンドウ・データと比較し、ウィンドウ品質値(WQ)、或いは、ウィンドウ品質値の範囲を含む、比較に基づく結果を記録する。捕捉支援ウィンドウの生成に使用されるソース・データはウィンドウ品質値に従って調整される。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
軌道予測装置、及び軌道予測方法
【課題】演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備える。
(もっと読む)
軌道予測装置、及び軌道予測方法
【課題】予測誤差を削減することを可能にする軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、受信データに基づいて測位衛星の位置と速度である位置速度情報を算出する衛星位置速度算出部と、衛星位置速度算出部が算出した前記位置速度情報が時刻毎に記憶されている記憶部と、記憶部に記憶されている位置速度情報に基づき測位衛星に位置を推定する軌道予測部と、を備え、衛星位置速度算出部は、記憶部に予め定められている個数以上の位置速度情報が記憶されている場合、時刻が近接する2個の位置速度情報同士を比較して位置速度情報の記憶を開始してからの経過時間が大きい方の位置速度情報を削除した後、算出した位置速度情報を記憶部に記憶させる。
(もっと読む)
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
(もっと読む)
エフェメリス拡張システムとGNSSでの使用方法
【課題】全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
(もっと読む)
位置情報提供装置および位置情報提供方法
【課題】 大掛かりな設備や、携帯端末等の装置の設計変更を必要とせずに、場所によらずに携帯端末等の装置が正確な位置情報を取得できるようにする。
【解決手段】 位置情報提供装置1は、複数の信号受信部2と、位置確定部3と、無線通信部4とを有する。各信号受信部2は、それぞれ、位置情報を含む互いに異なる種類の信号を受信する機能を備えている。位置確定部3は、信号受信部2で受信された各信号に含まれている位置情報と、それら各信号に対して与えられる信頼度とに基づいた演算処理により、自装置の所在位置を確定する機能を備えている。無線通信部4は、位置確定部3により確定した前記所在位置の情報を伝達する信号を、予め定められた信号形式でもって外部に向け無線送信する機能を備えている。
(もっと読む)
位置検出システム、機器制御システム、及び位置検出方法
【課題】セミパッシブRFIDを用いた位置検出における検出の精度を向上させる。
【解決手段】位置検出システムは、複数のエリアごとに設置され、それぞれがエリアに対応付けられた位置情報を含む信号を周期的に送信する複数の発信部と、発信部が送信する信号を受信すると、該信号に含まれる位置情報、及び予め割り当てられている自機を識別する識別情報を含む信号を送信する電子タグ部と、電子タグ部が送信する信号を受信すると、今回受信した信号に含まれる識別情報と一致する識別情報を含む信号のうち1回前に受信した信号に含まれる位置情報である前回位置情報と、今回受信した信号に含まれる位置情報である今回位置情報と、該識別情報とを含む検出情報を出力する検出情報生成部と、検出情報に含まれる前回位置情報及び今回位置情報の組合せに基づいて、複数のエリアのうち、電子タグ部が位置するエリアを判定する位置判定部とを備える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
サービス情報提供システム
【課題】コスト増大を招くことのない安価なシステム構成で、通信端末の位置するサービス領域に応じた最適なサービス情報を提供する。
【解決手段】建造物内の複数のエリアを移動可能な通信端末1と、通信端末1と無線通信可能なセンター装置2と、を有するサービス情報提供システムSであって、通信端末1は位置検出用電波を発し、センター装置2は、建造物内の所定の測定地点に設けられ、通信端末1の位置検出用電波の発信点を特定するとともに発信点の位置と、発信点からの位置検出用電波に含まれるID情報とによる特定結果に基づき、通信端末1が存在するエリアを検出し、この検出結果に基づき、対応したエリア情報を通信端末1へ送信し、通信端末1は送信されたサービス情報を表示する。
(もっと読む)
センサ管理装置、センサ管理方法及びプログラム
【課題】位置が固定された各センサの計測範囲を容易に推定すること。
【解決手段】位置が固定された複数のセンサの全部又は一部と、位置が固定されていない移動物体(2)との間のそれぞれの距離を示す距離情報を、前記センサ又は前記移動物体から受信する受信手段(31)と、複数の前記距離情報に基づいて、各々の前記センサ及び前記移動物体の位置を推定する第1の処理手段(32)と、推定された各々の前記センサ及び前記移動物体の位置に基づいて、各々の前記センサについて、当該センサに係る計測を可能にする範囲を示す計測範囲を算出する第2の処理手段(33)とを備え、前記第2の処理手段(33)は、前記センサの計測範囲を推定するにあたって、極座標を用いて前記センサの計測範囲の境界線を推定することを特徴とする。
(もっと読む)
1 - 20 / 233
[ Back to top ]