
Fターム[5J062EE00]の内容
無線による位置決定 (18,435) | 補正 (1,594)
Fターム[5J062EE00]の下位に属するFターム
電波伝搬 (576)
ドップラ効果 (140)
ディファレンシャル方式 (252)
時計 (359)
Fターム[5J062EE00]に分類される特許
41 - 60 / 267
マルチコンステレーション全地球航法衛星システム補強及び支援
マルチコンステレーションGNSS補強及び支援システムは、複数の基準局を含むことができる。各基準局は、ナビゲーションデータを複数の異なる全地球航法衛星システムから受信し、そして各異なる全地球航法衛星システムに関するインテグリティデータ及び性能データを監視するように適合させることができる。オペレーションセンターは、前記複数の基準局の各基準局から送信される前記インテグリティデータ及び性能データを受信することができる。通信ネットワークは、前記オペレーションセンターからのメッセージを、ユーザのnavcom機器に送信して前記navcom機器を補強し、そして支援することができる。 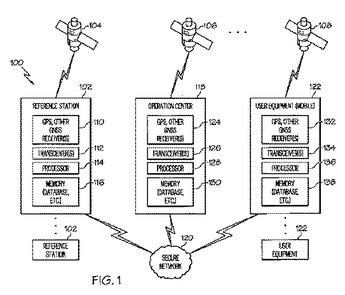 (もっと読む)
(もっと読む)
位置推定システム及びプログラム
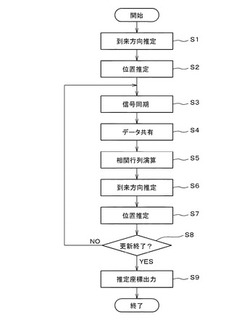
【課題】複数のサブアレーにおけるAOA(Angle of Arrival)推定に基づいて信号源の位置を推定する位置推定システム及びプログラムにおいて、サブアレーのアンテナの素子数を増やさずに位置推定精度を向上させ、コスト削減と装置サイズの縮小を達成する位置推定システム及びプログラムを提供すること。
【解決手段】各サブアレーにおけるAOA推定に基づいて信号源の概略位置を初期推定し、信号源と各サブアレーまでの距離に基づいて各サブアレーにおいて受信信号を位相補正して同期を取り、複数のサブアレーからの信号を共有して、その相関行列に基づいてAOAを更新し、推定位置を更新する。
(もっと読む)
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム

【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
位置情報取得システム、位置情報取得装置、位置情報取得方法
【課題】機器に表示された地図をユーザが見ることなく、GPS装置によって取得された位置情報をユーザが補正することができる位置情報取得装置を提供する。
【解決手段】音声によって入力された情報を解析し、情報に含まれる目標物を特定する音声認識サーバ装置1と、特定された前記目標物に基づいて、移動通信装置によって測位された測位情報を補正する位置補正サーバ装置202とを含む位置情報取得装置を構成する。そして、位置補正サーバ装置202に、測位情報に関する誤差に基づいてユーザが存在し得る特定範囲を特定する誤差判定部301、ユーザ存在範囲特定部302と、特定範囲のうち、目標物が視認可能な範囲と重複する視認可能エリアを特定し、測位情報が示す移動通信装置の現在位置を、視認可能エリアの重心を含む範囲に補正するユーザ位置補正処理部303とを設ける。
(もっと読む)
位置推定システム、通信端末、および位置推定方法
【課題】 近距離に位置する検索対象の通信端末の位置を精度良く推定すること。
【解決手段】 位置推定システムの携帯端末Aでは、被検索端末の位置を示すGPS位置情報に誤差がある場合であっても、Bluetooth通信部4におけるBT通信により、距離演算部5において得られる端末間距離情報によって近距離に位置する両端末間の距離を把握することができ、被検索端末のGPS位置情報にこの端末間距離情報を加味することにより、緯度経度演算部6によって、検索端末から近距離に位置する被検索端末の位置を精度良く推定することができる。また、被検索端末の位置をディスプレイ9によって表示することにより、携帯端末Aのユーザに対して被検索端末の位置を精度良く報知することができる。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
拡張SPS軌道情報を用いた位置特定のための方法および装置
【課題】じかに衛星からまたは場所支援サーバから必要なアルマナックおよび/またはエフェメリスをダウンロードする頻度を減らす。
【解決手段】サーバが、衛星の大まかな軌道データと衛星の正確な軌道データとの間の訂正を計算する。訂正の変化が時間を通じて大幅に滑らかになるよう座標系を選択する。サーバはさらに、移動局への伝送に必要なビット数を減らすために、数学関数を用いて訂正を概算する。移動局は、係数を受信すると、係数および適用時間(たとえば現在の時間)を用いて数学関数を評価し、評価した結果を標準的な座標系に変換し、変換結果を大まかな軌道データに適用して正確な軌道データを取得する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
位置情報管理システムおよび位置情報管理方法
【課題】移動端末の測位をより精度よく行うことが可能な位置情報管理システムおよび位置情報管理方法を提供する。
【解決手段】通信システム10は、まず、移動機100の端末位置情報およびセクタ情報を取得し、当該端末位置情報が当該セクタ情報により定められたセクタ勢力図S1外を示しているか否かを判断する。そして、端末位置情報がセクタ勢力図S1外を示していると判断されると、当該セクタ勢力図S1上に、当該端末位置情報を補正する。このように、端末位置情報がセクタ勢力図S1に存在しないと判断されると、当該端末位置情報が当該セクタ勢力図S1上に補正されるため、本来はセクタ勢力図S1上に存在するはずの移動機100の端末位置情報をより適切に補正することができる。この結果、移動機100の測位をより精度よく行うことが可能になる。
(もっと読む)
位置測位装置、位置測位方法および位置測位プログラム
【課題】概略位置の精度に応じて測位計測におけるタイムアウト時間を変化させることによって、現在位置を測位することができないときの測位に必要な待ち時間を短縮することのできる位置測位装置、位置測位方法および位置測位プログラムを提供する。
【解決手段】概略位置誤差判定部22eは概略位置の誤差半径を判定し、タイムアウト時間設定部22gは概略位置誤差判定部22eによって判定された誤差半径に応じて測位計測におけるタイムアウト時間T1〜T3,Tmaxを設定する。位置測位処理タイムアウト指示部22hは、各タイムアウト時間T1〜T3で可視衛星数Sが所定の数に満たない場合またはタイムアウト時間Tmaxに達した場合、位置測位処理部22dで実行されている位置測位処理をタイムアウトさせる。
(もっと読む)
多元無線アクセス技術における測位のための支援データ
移動局がアタッチされていない第1のワイヤレスネットワークからの地上支援データに基づいて移動局の位置を決定するための装置及び方法である。すなわち、移動局は、第1のワイヤレスネットワークから地上支援データを受信することと、第1のワイヤレスネットワークにアタッチされていない間に第1のワイヤレスネットワークからタイミング測定値などのロケーション情報を取得して、この移動局の位置を決定するために地上支援データを使用することとが可能である。第1のワイヤレスネットワークは、移動局が加入させられ、アタッチすることができるネットワークであってもよい。 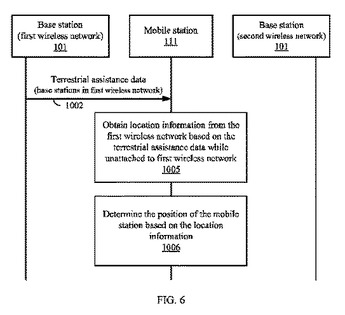 (もっと読む)
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
セルラ・ネットワーク内でのGPS航法データの増分放送のためのシステムと方法
【課題】無線通信ネットワーク資源に過度の負担をかけずに適時に航法データを無線通信ネットワーク内の移動局に放送する方法を提供する。
【解決手段】各移動局は無線通信ネットワーク内で動作するトランシーバとGPS位置決め測定を行うための組み込みGPS受信機とを含み、また各移動局は最近見えていたGPS衛星について過去の軌道モデル化情報を有し、航法データを無線通信ネットワーク内の移動局に放送する方法は、現在見えている衛星について現在の軌道モデル化情報を定期的に受信し、受信した現在の軌道モデル化情報と過去の軌道モデル化情報とを比較して、偏差があれば更新された軌道モデル化情報を生成し、無線通信ネットワーク内で通信する全ての移動局に更新された軌道モデル化情報を無線通信ネットワークで放送する。
(もっと読む)
位置判断のためにアンテナビームにウォーターマーキングすること
アンテナアレイが、単一の基地局セクタ内の1つまたは複数のビームの信号をスタガリングし得る。時間遅延ビームは、それらが搬送している信号内にウォーターマークを有し得る。次いで、受信ユニットが、そのビームを時間遅延ビームとして識別し、記憶されたデータを使用して遅延を補償し得る。受信ユニットは、ビーム識別情報を基地局に送信し、時間遅延データを受信し得る。 (もっと読む)
無線移動通信ネットワークにおいて複数の移動局を用いて基地局の所在位置を決定する方法及び装置
【課題】基地局と通信中の移動局を含む無線通信ネットワークにおいて基地局の位置を決定する方法及び装置を提供する。
【解決手段】BTS校正サーバーが、基地局とネットワーク接続される。BTS校正プログラムが、位置特定能力を有する移動局群内にプログラミングされる。前記BTS校正プログラムを用いて、校正情報を前記BTS校正サーバーによって要求することができ、又は前記移動局によってセッションを開始させることができる。前記BTS校正プログラムは、前記移動局のユーザーが基地局の所在位置を特定するために用いられるのを防止することを可能にするプライバシー機能も提供する。前記BTS校正プログラムは、権限が付与されている場合は、前記移動局の位置を決定し(54)、位置測定値及び基地局位相測定値等の校正情報を前記サーバーに提供する(56)。前記校正情報は、基地局アルマナックを校正するために使用することができる。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
無線ネットワークハイブリッドポジショニングのための方法及び装置
【課題】移動局において、携帯電話ネットワークと衛星ポジショニングシステム(SPS)との組み合わせで、ポジション決定及び他の操作のための方法及び装置を提供する。
【解決手段】移動局はポジション決定のため複数の無線ネットワークからの無線信号を使用する。時間及び/又は周波数情報を取得する。さらに、無線アクセスポイントについての統計データ、すなわち、携帯電話基地局、無線ローカルエリアネットワークアクセスポイント、ポジショニング信号用の中継器、或いは他の無線通信送信機などから、信号を受信した移動局のロケーションを採取するために、又ロケーション情報、すなわち、無線アクセスポイントのポジション及びサービスエリアを収集された統計データから無線ネットワーク用に取り出すために、移動局は使用される。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
【課題】無線装置が、遠距離位置追跡を可能にするためのジオロケーションおよび局所的位置追跡を可能にするための局所的位置技術を利用することにより、目標物に関する位置データを提供する。
【解決手段】ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
41 - 60 / 267
[ Back to top ]