
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
1 - 20 / 252
移動基準局を利用した車両間相対位置制御方法及びそのシステム
【課題】車両間相対位置の正確度を改善し、位置制御できる移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供する。
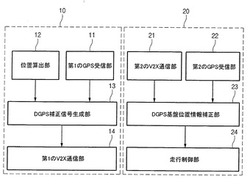
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
(もっと読む)
情報管理装置、情報管理方法および情報管理プログラム

【課題】利用者が電子メールなどのデータの内容を確認できない状況にある場合に、利用者が電子メールなどのデータに気付かずに不利益を被ることを軽減する情報管理装置、情報管理方法および情報管理プログラムを提供する。
【解決手段】第1のサーバから利用者識別情報、第1の位置情報、第1の日時情報を収集し、第2のサーバから利用者識別情報、第2の位置情報、第2の日時情報を収集する収集部と、第1の日時情報を用いて決められる期間に含まれる第2の日時情報に対応する第2の位置情報のいずれかが、該決められた期間に対応する基準となる位置と一致しないと判定する判定部と、一致しないとき代理人の第3の端末に通知する情報を生成する出力生成部と、生成した情報を第1のサーバに送信する送受信部と、を備える情報管理装置である。
(もっと読む)
人工衛星ベースの受信機に対するSBAS支援情報を持ったAGPSサーバ
【課題】特定の地表位置から視認可能な静止衛星型衛星航法増補システム(SBAS)の情報を提供される航法受信機が、それらから視認可能なSBAS衛星の擬似乱数(PRN)信号をインテリジェントに探索、捕捉、および追跡することができるようにする。
【解決手段】人工衛星航法システム支援サーバは、クライアント位置の表示を含むクライアントの要求に応答するように構成されている。人工衛星航法システム支援サーバは、正確な位置がサーバ要求に含まれる場合には、どの特定のSBASシステムが要求中のクライアントから観測可能であるかを演算する。この場合には、その応答を、人工衛星航法システム支援サーバは、よりコンパクトな応答メッセージに対する関連情報に制限する。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
油圧ショベルの較正装置及び油圧ショベルの較正方法
【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正装置及び較正方法を提供する。
【解決手段】油圧ショベルの較正装置は、入力部63と、第1較正演算部65cと、第2較正演算部65dと、を備える。入力部63は、作業点位置情報とアンテナ位置情報とが入力される部分である。作業点位置情報は、外部計測装置で計測された作業点の複数の位置での座標を示す。アンテナ位置情報は、外部計測装置で計測されたアンテナの位置の座標を示す。第1較正演算部65cは、入力部63に入力された作業点位置情報に基づいて、数値解析により作業機パラメータの較正値を演算する。第2較正演算部65dは、入力部63に入力されたアンテナ位置情報に基づいてアンテナパラメータを較正する。
(もっと読む)
方位測定装置
【課題】比較的低精度(低価格)のジャイロを用いて実用的なストラップダウン方式の方位測定装置を実現する。
【解決手段】ストラップダウン方式の方位測定装置であって、一定間隔を隔てて配置された2つに受信アンテナを備え、各受信アンテナで受信した測位用電波に基づいて各受信アンテナの位置を演算し、当該各受信アンテナの位置に基づいて移動体の基準方位角を測定する基準方位角測定手段をさらに備え、演算装置は、該基準方位角測定手段から得られる基準方位角を用いて座標変換行列の初期値を決定する。
(もっと読む)
方位測定装置
【課題】高緯度における方位誤差を従来よりも低減する。
【解決手段】慣性センサの検出量に基づいて航走体の第1の方位角を測定するマスタコンパスと、一定間隔を隔てて配置された2つに受信アンテナを備え、各受信アンテナで間欠的に受信した測位用電波に基づいて各受信アンテナの位置を演算し、当該各受信アンテナの位置に基づいて航走体の基準方位角を測定する基準方位角測定手段と、該基準方位角測定手段から間欠的に入力される基準方位角に基づいて当該基準方位角よりも細かい間隔のバックアップ方位角を出力するバックアップ方位角演算部と、緯度が所定の基準緯度を超えない状態では第1の方位角を外部に出力し、緯度が所定の基準緯度を超えた状態ではバックアップ方位角を外部に出力する出力方位角切替部とを具備する。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
計測システム、移動体装着端末及びデータ処理装置
【課題】 大規模なゲート等の設置を必要とせずに、競走馬に意識させずに設置でき、高速で駆ける競走馬のハロンタイムを確実に自動取得できる計測システム、移動体装着端末及びデータ処理装置を提供する。
【解決手段】 計測システムは、無線中継装置、移動体装着端末及びデータ処理装置を具備する。無線中継装置は、無線通信を行うための無線エリアを形成する。移動体装着端末は、無線エリア内を移動する移動体に装着され、GPSユニット及び無線ユニットを備える。GPSユニットは、移動体の位置情報及び位置情報を取得したときの時刻情報をGPSにより取得する。無線ユニットは、位置情報及び時刻情報を無線信号に変換し、無線信号を無線中継装置へ送信する。データ処理装置は、無線中継装置を介して移動体装着端末からの無線信号を受信し、位置情報及び時刻情報に基づき、移動体が無線エリア内において予め設定された距離を移動するのにかかる時間を算出する。
(もっと読む)
測位装置、測位装置の調整方法およびプログラム
【課題】 較正処理の実行時期を判断するためだけに多大な負荷を要することなく、自律航法の測位に必要な較正処理を適切な時期に行うことのできる測位装置、測位装置の調整方法およびプログラムを提供する。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
(もっと読む)
衛星航法システムにおける電離圏異常を検出する方法及びその装置。
【課題】 1周波数のみの観測データを用い、基準局とモニタ局間の基線長に影響されない衛星航法システムにおける電離圏異常を検出する事。
【解決手段】 基準局とモニタ局で取得した衛星データの1周波数のみのコード疑似距離と搬送波位相の観測データの搬送波位相及び電離圏フリー線形結合の受信機間一重差を求め、SD電離圏遅延、SD搬送波位相バイアス、SD受信機時計誤差を状態変数とする全航法衛星を利用した観測方程式を構成し、状態変数を最小二乗原則でエポック毎に推定して観測方程式のフロート解を求め、SD搬送波位相バイアスをDDに変換し、整数不定性決定手法によりDD搬送波位相バイアスの整数解の候補を求め、この候補に対し検定を実行して観測方程式のフィックス解を求め、基準局とモニタ局間の推定したSD電離圏遅延、SD受信機時計誤差を修正し、最終的に得たSD電離圏遅延により電離圏異常を検出する。
(もっと読む)
ゴルフ場運行管理システム
【課題】ゴルフカートの運行管理、および、プレイヤーへの情報提供を行うことのできるゴルフ場運行管理システムを低コストで実現する。
【解決手段】センター装置1と、ゴルフカートに設置される中継端末4を有するゴルフ管理運行システムにおいて、センター装置1と中継端末4の間のデータ通信をUHF無線で行い、クラブハウス内で、データ量が多い固定した初期データを予め、センター装置1と携帯端末8の間のデータ通信しておき、ゴルフコースに出てからは、携帯端末8とセンター装置1の間のデータ通信は、データ量の少ないプレイ中に変動する随時更新データのみを、中継端末4経由で行う。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
ゴルフアドレス調整システム
【課題】アドレス姿勢確認システムを提供する。
【解決手段】ゴルフアドレス姿勢確認システムは、位置情報を取得する測位装置を含む第1、第2測定部を備える。2つの測定点における位置情報に基づいて、2つの測定点を結ぶ直線を特定する制御部を備える。告知部を備える。第1測定部は使用者の一方の肩に取り付けられる。第2測定部は使用者の他方の肩に取り付けられる。制御部は、アドレスに入る前に、使用者が第1位置に移動した時に第1測定部を使って得た第1位置情報と、第2位置に移動した時に第1測定部を使って得た第2位置情報とに基づいて、第1直線を特定する。アドレスに入る時に、特定の時間間隔で、第1特定部で取得した位置情報と、第2測定部で取得した位置情報とに基づいて、使用者の両肩を結ぶ第2直線を特定する。制御部は、第1直線と第2直線とが平行な状態にあるか否かを判断し、告知部は、制御部による判断結果を使用者に告知する。
(もっと読む)
地上補強型衛星航法システム、該システムに用いられる衛星異常検出方法及び衛星異常検出プログラム
【課題】空港周辺の所定距離内の空域で航空機の進入着陸誘導を行う地上補強型衛星航法システム中で、衛星の異常を検出する精度を向上させる。
【解決手段】各測位信号のうちで、傾斜した電離層を越えて伝搬する測位信号があるとき、擬似距離補正値補正手段(擬似距離補正値補正部23a)により、同測位信号に対応した擬似距離補正値に対して、対応する測位衛星(GPS衛星10)の測位手段(GPSアンテナ21、GPS受信機22)に対する仰角の関数で表される電離層傾斜係数を用いて正規分布に近付くように補正して各検定統計量として生成される。衛星異常検出手段(インテグリティモニタ23b)により、擬似距離補正値補正部23aで生成された各検定統計量を用いて各GPS衛星10の異常の有無が検出される。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
【課題】浮動バイアス値を短時間で決定する。
【解決手段】ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する。静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化する。その後、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知として扱われて、WADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
衛星航法システムにおける測位誤差の補正方法及びその装置。
【課題】 1周波型GPS受信機の測位誤差を小さくする。
【解決手段】 航法衛星からの測位信号のクロック及び航法衛星の軌道、電離層による伝搬遅延の補正情報を求めて、ユーザ局へ送信するマスタ局と、既知点に設置された複数のモニタ局と、マスタ局と複数のモニタ局を結ぶネットワークとからなる衛星航法システムにおいて、マスタ局は、モニタ局で受信された2周波の測位データから電離層遅延量を計算し、この電離層遅延量から、1周波型GPS受信機で利用可能な電離層遅延量の補正情報であって、経緯度5度毎に作成されたグリッド点毎の情報であるグリッド情報を作成し、このグリッド情報から、クロックの補正情報と軌道の補正情報を計算して、グリッド情報と共にこれらの補正情報をユーザ局へ送信し、ユーザ局は、これらの補正情報を用いて航法衛星からの測位信号の補正を行い、自局の測位を行う。
(もっと読む)
騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置
【課題】構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することのできる騒音測定装置を提供する。
【解決手段】騒音測定システム3の固定局2は、第1衛星測位装置21と第1記録部22を有し、移動局1は、騒音計11、第2衛星測位装置12および第2記録部11を有する。第1衛星測位装置21は、地球上の所定の基準点に固定され、この基準点を経時的に測位して基準点データを得る。第1記録部22は、基準点データを時刻と対応づけて記録する。第2衛星測位装置12は、固定局2の第1衛星測位装置21が上記基準点を測位して基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて、騒音計11の位置を測位する。第2記録部11は、騒音計11によって測定された騒音レベルを第2衛星測位装置12によって測位された騒音計11の位置および時刻と対応づけて記録する。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
1 - 20 / 252
[ Back to top ]