
Fターム[5J062FF01]の内容
Fターム[5J062FF01]に分類される特許
101 - 120 / 1,399
受信されるSPS信号における曖昧さを減らすためのシステムおよび/または方法
【課題】衛星ナビゲーションシステムにおけるSV(宇宙船)から受信される信号に関連する曖昧さを解決するためのシステムおよび方法を提供する。
【解決手段】基準位置において第1の宇宙船(SV)から獲得される第1の信号から導き出される第1の擬似距離仮説を、基準位置から第1のSVまでの第1の距離と、基準位置から第2のSVまでの第2の距離との推定される差に少なくとも部分的に基づいて、基準位置において第2のSVから受信される第2の信号から導き出される1つまたは複数の第2の擬似距離仮説に関連付け、関連付けられた第1の擬似距離仮説に少なくとも部分的に基づいて、第1の信号を変調するデータ信号のビットエッジの位相の曖昧さを減らす。
(もっと読む)
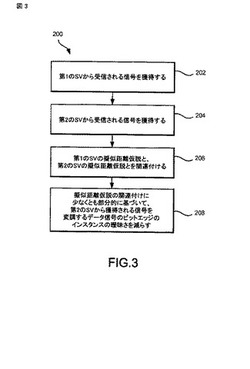
受信されるSPS信号における曖昧さを減らすためのシステムおよび/または方法

【課題】衛星ナビゲーションシステムにおけるSV(宇宙船)から受信される信号に関連する曖昧さを解決するためのシステムおよび方法の提供。
【解決手段】第1のSVから、第1の周期的に繰り返されるPN符号で符号化された第1の信号を受信すること202、第2のSVから、第2の周期的に繰り返されるPN符号で符号化された第2の信号を受信すること204、第1のSV1から受信された信号の擬似距離仮説を、第2のSV2から受信された信号の擬似距離仮説と関連付けること206、関連付けられた第1の擬似距離仮説に少なくとも部分的に基づいて、前記第1の信号を変調するデータ信号のビットエッジの位相の曖昧さを減らす208
(もっと読む)
測位装置およびプログラム
【課題】電池寿命の長期化、及び装置の小型化が可能となる測位装置を提供する。
【解決手段】GPS衛星から送られてくる位置情報に基づき、GPS処理部3により現在位置を計測する。傾斜スイッチ13の検出信号に基づき装置本体の振動の有無を検知するとともに、振動のない状態が一定時間以上継続したときには、停止状態にあると判断して、GPS処理部3による現在位置の計測動作を自動的に停止する。また、計測された現在位置が一定時間前の計測結果と同一であったとき、GPS処理部3による現在位置の計測動作を自動的に停止する。無意味な測位動作を停止することにより消費電力を削減する。また、サーモセンサーや加速度センサーにより装置本体の所定時間内の温度変化や姿勢変化等を検出する。それにより使用者に装着されていない状態を検知して現在位置の計測動作を自動的に停止する。
(もっと読む)
測位装置
【課題】未知局102からの電波を複数の受信装置100で受信し、その受信時間の差から未知局102の測位を行う際、各受信装置100内部の遅延時間を合わせる必要がある。
【解決手段】電波検出用の受信機に加え、第2の受信機であるGPS受信機を設ける。GPS衛星から時刻信号を受信し、これを測位のためのデータに関連づける。未知局102からの電波は受信され、増幅器とA/D変換器を経てデジタル信号処理回路へ入力される。この回路でFFTを施し、信号を周波数成分へ展開する。注目周波数の振幅をもとに増幅器の増幅率を制御する。ローパスフィルタはデジタル信号処理回路内に設ける。
(もっと読む)
雷発生位置標定装置および雷発生地域推定方法
【課題】雷の発生位置を広範囲のエリアにわたって、精度良く測定または推定する。
【解決手段】雷発生位置測定システム1は、雷放射観測装置110と雷発生位置標定装置10とで構成される。複数の雷放射観測装置110は、雷の観測対象のエリアに配置され、雷の発生位置の方向を示す仰角および方位角の時系列、当該時系列の時刻、観測地点の位置情報、および送信元を識別する識別情報を含む観測データを雷発生位置標定装置10に送信する。雷発生位置標定装置10は、観測データを受信し、識別情報の異なる仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した2つ以上の前記識別情報の異なる観測データを用いて、雷の発生位置を標定する。
(もっと読む)
測位装置、測位方法
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
(もっと読む)
高精度解析法による無線測位システム
【目的】本発明は、電波強度の変化特性を取り入れて各発信機から受信機までの距離の計測を行うことで、距離計測の精度を向上せしめ、ひいては無線測位システム自体の信頼性を大きく高めることができる高精度解析法による無線測位システムを提供することを目的とする。
【構成】電波を発信する複数の場所が既知な発信機と、複数の場所が既知な発信機から発信された電波を受信する受信機とを備え、発信された電波の電波強度値を利用して各発信機から受信機までの距離を計測し、計測したそれぞれの距離から受信機の位置を測定する無線測位システムであり、電波強度値を使用しての各発信機から受信機までの距離の計測に際して、各発信機から受信機までの距離の変化に対する電波強度の変化特性を考慮して計測を行い、電波強度の変化特性を考慮した計測値を用いて受信機の位置を計測する、ことを特徴とする。
(もっと読む)
GNSSアプリケーションのためのエフェメリス拡張方法及び機器
【課題】長期間有効な衛星予測データを計算し、そのデータを圧縮して、圧縮したデータをGNSS受信機に供給するための方法及び機器を提示する。
【解決手段】著しく小さいファイルサイズの衛星予測データを生成して、遠くの受信機に送信するために、物理モデルを考慮した多段階の圧縮工程によりデータを圧縮する。
(もっと読む)
位置情報送信機
【課題】位置情報送信機が設置された後に生ずる出力信号の偏差を補正することを可能とする位置情報送信機を提供することを目的とする。
【解決手段】人工衛星から送信される測位のための衛星測位信号との互換性を有する測位信号を送信する位置情報送信機であって、水晶に電圧をかけることにより、基準周波数の信号を生成する基準周波数発振部と、基準周波数の信号に電圧をかけることにより、基準周波数よりも大きい第1の周波数の信号となるように制御する第1の周波数制御部と、第1の周波数の信号を用いて、位置情報送信機が設置された位置を示す位置データを変調することにより、測位信号を生成する測位信号生成部と、基準時間を記憶する記憶部と、基準時間からの経過時間を計測する時間計測部と、を備え、経過時間が設定された第1の経過時間となった場合に、水晶にかける電圧を変化させることを特徴とする位置情報送信機である。
(もっと読む)
移動端末位置推定装置、移動端末位置推定方法及び電波環境指標算出方法
【課題】
RSSI(Received Signal Strength Indicator:受信電界強度)を利用した移動端末の位置推定は、フェージングとNLOS(Non Line Of Sight:見通し外)、すなわち電波環境の影響で、位置推定の誤差が一定しないという問題がある。
【解決手段】
移動端末は、アクセスポイントから送信される信号を帯域可変して受信してRSSIを算出し、そこから電波環境指標を算出する。この指標算出をアクセスポイント毎に行うことによって位置推定時の各アクセスポイントの重みづけに用いる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
無線端末位置計測システム
【課題】無線端末の存在する階層とは異なる階層にある無線基地局の測位情報を除去し、多階層建築物における算出位置誤差を著しく低減させることができる無線端末位置計測システムを提供する。
【解決手段】多階層建築物の各階層内を移動し無線信号を送出する無線端末と、前記多階層建築物の各階層内に設けられ、前記無線端末からの無線信号の電波特性パラメータを求めて送出するとともに、前記受信した無線信号の受信強度を求めて受信強度情報を送出する複数の無線基地局と、これら無線基地局からの電波特性パラメータと受信強度情報を収集し、この収集した受信強度情報に基づき、閾値以上の受信強度で無線信号を受信した無線基地局の数が最大となる階層を無線端末の存在する階層と推定し、前記収集された電波特性パラメータのうち前記推定された無線端末の存在する階層に存在する無線基地局の電波特性パラメータに基づき無線端末の位置を算出する測位計算部とからなる。
(もっと読む)
情報処理装置および情報処理方法
【課題】 高架道路および高架下道路のいずれかを車両が走行している際に、走行している道路が高架道路か高架下道路のいずれであるかを精度よく判断することができる情報処理装置を提供する。
【解決手段】 ナビゲーション1は、GPS受信機2から送信されるGPS情報に基づいて、自車両の位置を取得する。また、車車間通信装置4を介して、他車両位置情報および他車両位置情報を取得した際のGPS受信強度信号を取得する。さらに、取得した他車両位置情報およびGPS受信強度信号に基づいて、他車両が高架道路を走行しているか高架下道路を走行しているかの他車両三次元位置を取得する。こうして取得した自車両位置および他社量産時原位置に基づいて、自車両と他車両との衝突可能性を判断する。
(もっと読む)
衛星位置決めシステム信号を得る方法および装置
【課題】SPS信号をSPS衛星から得る時間を減少させる、衛星位置決めシステム信号を得る方法および装置を提供する。
【解決手段】第1のSPS衛星に対する第1の擬似距離が決定され、SPS受信機の近似位置が決定される。第2のSPS衛星に対する第2のSPS擬似距離に対する推定擬似距離が第2のSPS衛星の近似位置および衛星位置から決定される。SPS受信機は、推定擬似距離によって決定された距離の第2のSPS衛星からのSPS信号を探索する。推定擬似距離は、前記第2のSPS衛星に対する予め決定された擬似距離に基づかない。近似位置は、いろいろな無線セルサイトの各々の識別をセルラ(あるいはセルベース)電話システムのような無線セルベース通信システム内のオブジェクトに対する近似位置と相関するセルベース情報源から決定される。
(もっと読む)
無線位置決定精度を改善するための方法及び装置
【課題】利用可能な測定値を使用して端末に対するより正確な所在地推定値を行う、無線位置決定精度を改善するための方法及び装置を提供する。
【解決手段】端末110に対する初期の所在地推定値が、(例えば、セルID解又は拡張セルID解に基づいて)初めに取得される。測定値は、端末に対して取得される。初期の所在地推定値は、それから、測定値を用いて更新されて、端末に対する修正された所在地推定値を取得する。更新することは、下記によって実行されることができる、(1)初期の所在地推定値及び測定値に基づいて測定値ベクトルを決定すること、(2)測定値に対する観測行列を作成すること、(3)加重の行列を決定すること、(4)測定値ベクトル、観測行列、及び加重行列に基づいて補正ベクトルを導き出すこと、及び(5)補正ベクトルを用いて初期の所在地推定値を更新すること。
(もっと読む)
所在区域判定装置、所在区域判定方法、及び所在区域判定プログラム
【課題】位置情報に基づく移動体の所在区域の判定について該位置情報の測定誤差による影響を低減させること。
【解決手段】所在区域判定装置は、記憶部が記憶する、移動体の位置情報及び時刻情報の履歴に基づいて、前記移動体が所定区域の出入り口の所定範囲を出てから該所定区域の出入り口の所定範囲に入るまでの第一の期間を特定する特定部と、前記第一の期間における前記位置情報が、前記所定区域内又は前記所定区域の外側の所定範囲内に含まれている場合に、該第一の期間における前記移動体の所在位置は当該所定区域内であると判定する判定部とを有する。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
3次元形状導出装置および3次元形状導出方法
【課題】センサネットワークを用い、カメラやレーザでは測定困難な部位の形状までも導出する。
【解決手段】3次元形状導出装置100は、自体の3次元位置またはそれに相当する物理量を示す位置情報を発信する流動自在な複数の位置センサ112と、複数の位置センサを包容する包容体(ハンド92)と、複数の位置センサが発信した位置情報を受信するセンサ情報集約部114と、包容体の3次元形状を、複数の位置センサの位置情報に基づいて導出する3次元形状導出部130とを備える。
(もっと読む)
撮像装置
【課題】 一般に、GPSアンテナの感度分布は撮像装置の姿勢が横位置撮影の時に天頂方向の感度が最大になるように作られているので、縦位置撮影の場合には天頂方向の感度が低下してしまい、測位誤差が大きくなってしまう。
【解決手段】 CPU16は、時刻t1において姿勢センサ20の出力が横位置から縦位置へ変化したことを検知したら、一定の保持時間Tの期間、位置情報の更新を行わない。すなわち、時刻t1からt2において、CPU16は横位置でGPS受信機17から出力された最後の位置情報を保持する。
(もっと読む)
各基地局(celltower)で移動受信のためのマップを作成する方法および装置
【課題】移動受信のためのビデオマップを作成する。
【解決手段】移動受信のためのビデオマップを作成する方法および装置であって、基地局にもっとも近い関心のポイントを有する領域のビデオマップを作成すること、および、専用のチャンネルを介してビデオマップを繰り返し送ることを含む方法および装置を記載する。また、移動受信のためのビデオマップを受信する方法およびシステムであって、専用のチャンネルに合わせること、および専用のチャンネルを介してビデオマップを受信することを含む方法およびシステムを記載する。最後に、関心のポイントに関する位置を決定する方法および装置であって、専用のチャンネルを介してビデオマップを受信すること、Moving JPEG画像をビデオマップに重ねること、および車両移動をビデオマップに追跡記録することを含む方法および装置を記載する。
(もっと読む)
101 - 120 / 1,399
[ Back to top ]