
Fターム[5J062FF01]の内容
Fターム[5J062FF01]に分類される特許
1 - 20 / 1,399
測位装置、測位方法、測位プログラムおよびコンピュータ読み取り可能な記録媒体
位置情報処理装置および位置情報処理方法
位置標定システム、移動端末、及び位置標定システムの制御方法
速度推定装置及びプログラム
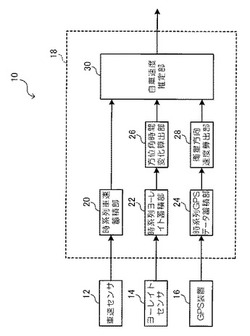
【課題】観測衛星数が少ない環境でも、安定して精度良く移動体の速度ベクトルを推定する。
【解決手段】車速データVtwheel、ヨーレイトデータωt、及びGPSデータを時系列に取得し、各々を時系列車速蓄積部20、時系列ヨーレイト蓄積部22、及び時系列GPSデータ蓄積部24に保存する。方位角時間変化算出部26で、時系列のヨーレイトデータωtに基づいて、方位角の時間変化θtgyroを算出し、衛星方向速度算出部28で、衛星方向速度Vstiを算出する。自車速度推定部30で、GPSデータに基づいて速度ベクトルを推定するための方程式であって、時刻毎に変化する未知パラメータの時間変化分を、方位角の時間変化及びクロックドリフトの時間変化で拘束した方程式に、観測値を代入して、時刻数×各時刻の観測衛星数分の方程式を立式し、得られたパラメータを用いて、自車両の速度ベクトルを推定する。
(もっと読む)
AISメッセージを検出するための方法

【課題】AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善すること
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
(もっと読む)
測位装置及びプログラム
【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
端末装置、及び情報処理システム
【課題】プライバシーの保護に配慮した情報収集を実現する。
【解決手段】本発明は、端末装置、及びこの端末装置より情報を収集する情報処理システムであって、端末装置が、計測を行うセンサ部と、位置を特定するための情報を取得する位置検出部と、時刻情報を取得する計時部と、通信網を介して通信を行う通信部と、制御部とを備える。制御部は、端末装置の位置を示す位置情報を位置検出部を用いて生成する。また、位置情報の確度を予め定められた範囲内で変更し、変更がなされた位置情報と、計時部により得られた時刻情報と、センサ部の計測結果を示す計測情報とを関連付けた送信用情報を生成する。そして送信用情報を、通信網を介して情報処理装置へ送信するよう、通信部を制御する。
(もっと読む)
測位装置及びプログラム
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
測位方法決定装置及び測位方法決定方法
【課題】 移動端末の状況に応じて適切な測位精度及び消費電力となるように測位方法を選択する。
【解決手段】 移動端末10は、移動体通信機能とGPS測位に用いられる信号の受信機能とを有すると共に自端末10の測位方法を決定する測位方法決定装置であって、自端末10が移動体通信機能によって受信した基地局からの電波の基地局送信電力を示す情報を取得する送信電力情報取得部13と、基地局送信電力を示す情報に基づいて測位方法を選択する測位方法選択部16と、選択された測位方法を示す情報を出力する出力部17とを備える。
(もっと読む)
移動基準局を利用した車両間相対位置制御方法及びそのシステム
【課題】車両間相対位置の正確度を改善し、位置制御できる移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供する。
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
(もっと読む)
位置標定装置、車載器、位置標定方法、位置標定プログラム、運転支援方法、運転支援プログラム、道路課金方法、道路課金プログラム、位置標定システム、運転支援システムおよび道路課金システム
【課題】車両間で相対DGPSを行わなくても車両間の相対位置が得られるようにすることを目的とする。
【解決手段】測位信号受信部112は測位衛星102から測位信号を受信して観測量を算出する。自己位置標定部114は観測量を用いて概略位置の座標値を算出する。LEX信号受信部111は準天頂衛星からLEX信号を受信して地域別の測位補強情報を取得する。デコード部113は概略位置を含んだ地域の測位補強情報を選択して観測量の補正量を算出する。自己位置標定部114は観測量を補正し、補正した観測量を用いて標定座標値を算出する。V2V通信制御部115は標定座標値を他の車両103へ送信し、他の車両103の標定座標値を受信する。相対位置演算部116は自己の車両103と他の車両103の標定座標値に基づいて他の車両103の相対位置を算出し、算出した相対位置を運転制御支援装置104に出力する。
(もっと読む)
視覚ステークアウト
【課題】全地球ナビゲーション衛星システムを提供する。
【解決手段】ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、方法は、衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、デバイスの配向センサーからのデータに基づいてデバイスの配向を決定することと、関心の地点の位置を得ることと、デバイスの第1のカメラから第1のライブ画像700を得ることと、デバイスのディスプレイ上に第1のライブ画像を表示することと、第1のライブ画像において、第1のライブ画像における関心の地点の第1の位置704を示す第1のマーカー702を表示することと、第2のライブ画像を得ることと、デバイスのディスプレイ上に第2のライブ画像を表示することと、第2のライブ画像において、第2のライブ画像における関心の地点の第2の位置を示す第2のマーカーを表示することとを含む。
(もっと読む)
移動局装置
【課題】
GPSアシストデータを取得する際に、冗長な測位サーバクセスを抑制する。
【解決手段】
GPS衛星からGPS信号を受信し、測位サーバからアシストデータを受信して、GPS信号とアシストデータを用いて自局の位置を測定する移動局装置において、移動局装置が第1の位置にいるときに、基地局からの受信レベルと送信電力値により第1の概略位置を算出するとともに、第1のアシストデータを取得して測位処理を行い、移動局装置が第2の位置に移動したときに、第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が閾値未満の場合は、第2のアシストデータの取得を行わず、第1のアシストデータを用いて測位処理を行い、移動距離が閾値以上の場合は、第2のアシストデータを取得して測位処理を行う。
(もっと読む)
移動体装置、情報処理装置、位置情報取得方法、位置情報取得システム、及びプログラム
【課題】位置情報の改竄の可能性を低減し、位置情報の信頼性を高める。
【解決手段】移動体装置は、接近する移動体装置から第1の識別情報を取得する識別情報取得部と、上記第1の識別情報を取得した時点における現在地点の位置情報を取得する位置情報取得部と、上記第1の識別情報及び上記位置情報を対応づけて外部装置に送信する送信部と、を有する。
(もっと読む)
無線通信装置
【課題】GPS衛星のサーチ時間を短縮し、測位時間をより短縮することができる。
【解決手段】指示部207は、GPS衛星から送信される航法メッセージの取得を周辺端末に対して指示する。通信部204は、周辺端末が取得した航法メッセージを当該周辺端末から取得する。測位演算部209は、周辺端末から取得した航法メッセージを用いて測位演算を行う。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
マルチモードのGPS使用可能カメラ
【課題】GPS使用可能移動局記録デバイスにおいてロケーション位置を画像にタグ付けするために、カメラを具備するデバイス中で画像に地理的タグ付けする方法で、画像を取り込み、ポジションを決定するし、決定したポジションを画像にタグ付けする。
【解決手段】画像を取り込むことと、衛星信号とワイヤレスネットワーク信号との検出に基づいて、ポジションを決定することと、決定したポジションを画像にタグ付けすることとによって、画像に地理的タグ付けする。
(もっと読む)
衛星システムからの精確な絶対時刻の転送
【課題】十分なシステム性能を発揮し、減衰又は妨害環境においても利用可能な衛星ベースの時刻転送及びナビゲーション技術を提供する。
【解決手段】衛星システムを使用して精確な絶対時刻を取得する様々な技術が提供されている。衛星からデバイスへ精確な絶対時刻を転送する方法は、フレーム構造を有するデータをメッセージングチャネルから受信することを含む。前記データを使用して衛星と衛星の位置とを識別し、衛星の識別及び位置を使用して信号の移動時間についての修正を行い、前記データを時刻基準として使用して受信機のクロックをフレーム構造に整合させることも含む。前記受信機のクロックが前記フレーム構造に整合されたら、衛星から周期的な反復コードを含む精確な時刻信号を受信することを含む。前記コードのタイミング位相を決定し、前記タイミング位相を使用して精確な絶対時刻を決定することも含む。
(もっと読む)
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
支援型無線位置判断(determination)システムのための向上したデータメッセージング効率
【課題】冗長な、または余分なデータを低減または削除する。さらに、無線デバイスが追加の容量を負わされないことと、無線デバイスが正確な位置情報を与えられることを保証する。
【解決手段】複数の基地局と、基地局と通信するように適応させられた、移動電話およびパーソナルディジタルアシスタントのような、複数の無線デバイスとを含む。無線デバイスの地理的位置を判断する位置判断システムも含む。位置判断システムは、位置判断エンティティ(position determination entity, PDE)を含み、これは、基地局に接続され、無線デバイスの位置を計算するプロセシングサーバとしての役割を果たす。
(もっと読む)
1 - 20 / 1,399
[ Back to top ]