
Fターム[5J062FF02]の内容
Fターム[5J062FF02]に分類される特許
21 - 40 / 221
無線端末位置計測システム及び無線端末位置計測方法
【課題】
処理の負担が少ないままにより正確な位置計測を可能とする無線端末位置計測システムおよび無線端末位置計測方法を提供する。
【解決手段】
第一のパラメータを検出する測距センサ部と、前記第一のパラメータに関する情報と端末識別信号を前記無線基地局に送信する無線部と、を備える無線端末から送られてくる端末識別信号から第二のパラメータを取得し前記端末識別信号および前記第三のパラメータに関する情報とを測位計測部に送信する第一の無線基地局と、前記無線部から送られてくる端末識別信号から第三のパラメータを取得し前記端末識別信号および前記第三のパラメータに関する情報とを測位計測部に送信する第二の無線基地局と、受信した前記第一のパラメータと、前記第二のパラメータと、前記第三のパラメータから前記無線端末の位置を計測する測位計測部と、を備える
(もっと読む)
携帯機器

【課題】携帯機器に設けられた測位装置の電力消費を低減する。
【解決手段】デジタルカメラ等の携帯機器にGPSレシーバ21が搭載され、現在位置を検出する。検出した現在位置に一定時間以上変化がない場合に、その位置をユーザの自宅等の生活圏とみなし、生活圏に位置する場合にはGPDレシーバ21の受信周期を通常よりも増大させて電力消費を削減する。
(もっと読む)
情報処理装置及びその制御方法、並びに、プログラム
【課題】ローカルタイムとUTCとが混在する場合であっても、画像データとログ情報の関連性を把握可能にする。
【解決手段】
情報処理装置の処理手段は、画像データが撮影された日時の情報に、協定世界時(UTC)による第1の日時情報が含まれる場合には、第1の日時情報と、測位日時の情報とを比較して対応するGPSログファイルを特定し、画像データが撮影された日時の情報に、第1の日時情報が含まれず、ローカルタイムで記述された撮影日時の情報が含まれる場合には、撮影日時の情報を時差情報に基づいて協定世界時による第2の日時情報に換算し、第2の日時情報と測位日時の情報とを比較して対応するGPSログファイルを特定する。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
撮像装置
【課題】 一般に、GPSアンテナの感度分布は撮像装置の姿勢が横位置撮影の時に天頂方向の感度が最大になるように作られているので、縦位置撮影の場合には天頂方向の感度が低下してしまい、測位誤差が大きくなってしまう。
【解決手段】 CPU16は、時刻t1において姿勢センサ20の出力が横位置から縦位置へ変化したことを検知したら、一定の保持時間Tの期間、位置情報の更新を行わない。すなわち、時刻t1からt2において、CPU16は横位置でGPS受信機17から出力された最後の位置情報を保持する。
(もっと読む)
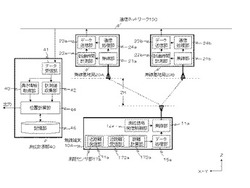
無線端末位置計測システム及び無線端末位置計測方法
【課題】処理の負担が少ないままにより正確な位置計測を可能とする無線端末位置計測システムおよび無線端末位置計測方法を提供する。
【解決手段】測位計測部40は、無線端末10Aから送られてくる端末識別信号から第一のパラメータを取得し、前記無線端末10Aから送られてくる端末識別信号から第二のパラメータを取得し、前記無線端末10Aから、近距離受信部31を介して端末識別信号および第三のパラメータを取得し、前記第一のパラメータと、前記第二のパラメータと、前記第三のパラメータの端末識別信号をマッチングさせて前記無線端末の位置を計測する。
(もっと読む)
給電レール及び位置管理システム
【課題】例えば、所定位置に検出手段を備えた給電レールをフロアーの天井に配置し、この検出手段により所定位置に対応した給電レール近傍の物理量を検出する。
【解決手段】管理サーバ21は、給電レール50に設けた複数個の赤外線センサ40の位置および担当エリアを把握しておく。赤外線センサ40は、エリアの温度を検出しているため、人がいる場合を検出するので、管理サーバ21は、人の位置を管理できる。しかも、この給電レール50は、PLCシステムの一部として用いられるため、信号の授受は電力線を流れる電流に重畳して行うことができ、赤外線センサ40の配線等を別途行うことなく、検出対象の位置管理が可能となる。
(もっと読む)
監視システム、及び監視プログラム
【課題】監視対象に設置し、監視対象が移動して変位する場合に始動し、監視対象近辺の画像を指定メールアドレスへ自動送信するとともに監視対象近辺へ威嚇音やメッセージを発する、監視システムを提供する。
【解決手段】監視対象側に位置し、入力手段と送受信手段と加速度測定手段と撮影手段と記憶手段を含んで構成され、利用者側の操作端末からのコマンドにより遠隔操作が可能な通信端末を、操作コマンドを解析するモード解析手段221と、加速度測定手段のセンサ情報をもとに位置情報を算出し、閾値を超えたことを報知する加速度解析手段223と、操作端末から画像取り込みコマンドが入力するときあるいは加速度解析手段が閾値を超えていることを知らせるときに撮影画像を画像処理する画像処理手段224と、加速度解析値が閾値を超えた場合、規定フォーマットの画像を撮影し、データ通信による通知と撮影データを指定の電子メールアドレスに自動送信する。
(もっと読む)
GPS装置およびカメラシステム
【課題】長時間の給電が可能なGPS装置を提供する。
【解決手段】本発明に係わるGPS装置(20)は、GPS衛星から送信された電波を受信するアンテナ(22)と、前記アンテナで受信した電波に基づいて位置検出を行う位置検出手段(21)と、接続された電子機器から給電される第1電力を受電する受電手段(23)と、前記第1電力とは異なる第2電力を発生する発電手段(24)と、前記第1電力または前記第2電力が給電されている間は、前記位置検出手段による位置検出を連続的に実施させる制御手段(26)と、を備える。
(もっと読む)
情報制御システム
【課題】コスト増大を招くことのない安価なシステム構成で、通信端末からの送信情報の内容を当該通信端末の位置する領域に応じて制限する。
【解決手段】建造物内の複数のフロアを移動可能な少なくとも1つの通信端末1と、通信端末1と無線通信可能なセンター装置2と、を有する情報制御システムSであって、通信端末1は電波信号を発し、センター装置2は、建造物内の所定の測定地点に設けられ、アレイアンテナ3を有し、通信端末1の電波信号の発信点を特定するための第1処理段階G1、第3処理段階G3、第4処理段階G4、第5処理段階G5及び第6処理段階G6とを実行し、さらに発信点の特定結果に基づき通信端末1が存在するエリアを検出し、この検出結果に基づき、通信端末1から送信される電波信号に含まれる外部送信データの内容を制限する。
(もっと読む)
RFIDタグ位置検出装置およびRFIDタグの位置検出方法
【課題】迅速にRFIDタグの位置を検出する。
【解決手段】RFIDタグ位置検出装置1は、RFIDタグ2a〜2cへ信号を送信する送信アンテナ11と、RFIDタグ2a〜2cからの応答信号を受信する4つの受信アンテナ12a〜12dと、各受信アンテナ12a〜12dが受信した応答信号に応じて出力する信号の時間差を計測し、計測した各時間差に基づいてRFIDタグ2a〜2cの相対座標を演算する計測部とを備えている。
(もっと読む)
電波推定方法、及び電波推定プログラム、並びに電波推定装置
【課題】発信点推定における推定精度を大きく向上する。
【解決手段】電波の発信点TPを推定する電波推定方法であって、建造物H内に位置する所定の受信点RPから、ビームフォーミングによりアレイアンテナ3の指向性を制御しつつ、所定の受信角範囲における全ての方向にわたって電波を受信する第1処理段階G1と、この受信した全ての方向に含まれる複数の主要到来角それぞれに対し、受信点RPからレイトレーシング法により光を仮想的に仮想光線として放射し、建造物H内の仮想電波伝播経路を算出する経路図において、建造物Hの構造及び各構造材の材質を仮想電波伝播経路を算出するパラメータとして用いて、放射した複数の仮想光線の中から異なる任意の2仮想光線を選択する組み合わせによって抽出された2仮想光線がお互いに最も近づいた位置を経路図上の近接点として、近接点を全て抽出する第3処理段階G3及び第4処理段階G4とを有する。
(もっと読む)
GPSアンテナを搭載した撮像装置
【課題】 撮像装置にGPSを搭載する場合、感度を確保する為、通常使用時に上面に来る位置にアンテナを配置する。しかしながら、グリップした手がGPSのアンテナ上に来てしまい、感度が低下、最悪の場合は受信できないという問題があった。
【解決手段】 グリップ時にGPSアンテナが手で隠れないようにするために、開閉するLCDパネルの上面にGPSアンテナを配置する。
(もっと読む)
ハンドヘルド測地デバイスによるグラフィック支援遠隔位置測定
【課題】ハンドヘルド測地デバイスによるグラフィック支援遠隔位置測定の提供。
【解決手段】関心地点の位置を決定するための装置であって、装置は、複数の衛星から位置データを受信するための少なくとも1つのアンテナと、少なくとも1つのアンテナに結合された少なくとも1つの受信器と、配向データを取得するための配向回路網であって、配向データは、地平線に対して平行な平面に対する装置の配向を表す、配向回路網と、少なくとも位置データと配向データとに基づいて関心地点の位置を決定するための測位回路網とを含む、装置。
(もっと読む)
GNSSデバイスにおける衛星信号マルチパス緩和
【課題】デバイスにおける衛星信号マルチパス緩和の提供。
【解決手段】GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、方法は、GNSS衛星の第一のセットにおける衛星から信号を受信することと、少なくとも1つの画像センサから画像データを受信することと、少なくとも1つの配向センサから配向データを受信することと、画像データに基づいて妨害データを決定することと、妨害データ、配向データ、およびGNSS衛星位置データに基づいて、妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することと、GNSSデバイスの位置を決定することであって、GNSSデバイスの位置を決定することは、GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、妨害領域に対する第二のセットにおける少なくとも1つの衛星の位置とに基づくこととを含む、方法。
(もっと読む)
デジタルスチルカメラ
【課題】GPSロギングデータメモリの容量が少ないかつ長秒撮影中で、GPSロギングデータ取得時間よりも露光時間が長い場合には、位置が変わらずに同じ場所で撮影してしまうという問題があり、余分なメモリを食ってしまうという問題があった。
【解決手段】GPSロギングデータを取得する手段を有し、GPSロギングデータを取得する秒数を設定する手段を有し、露光時間を取得する手段を有し、その露光時間と設定したロギングデータを取得する秒数を比較する手段を有し、比較した結果露光時間の方が大きかった場合には、GPSロギングデータの取得時間を露光時間よりも大きい時間に設定する手段を有することを特徴とするデジタルスチルカメラ。
(もっと読む)
バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置
【課題】観測距離に含まれる観測誤差の分布のピーク値の正方向のずれであるバイアス量を、複数の観測距離を用いて推定する。
【解決手段】バイアス誤差推定装置は、位置が既知である複数の基地局20a、20b、20cと、位置が未知である移動局10との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部32と、観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部34とを備える。
(もっと読む)
全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザ
【課題】全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザを提供する。
【解決手段】少なくとも1つの割り当てられたGNSS周波数帯内の信号強度データを決定するための装置が提供される。装置は、GNSSアンテナを含む。GNSSアンテナは、割り当てられたGNSS周波数帯内の信号を受信する。装置は、受信回路網をさらに含む。受信回路網は、受信された信号を復調するためのものである。装置は、プロセッサ、およびプロセッサにより実行可能な命令を記憶するためのメモリをさらに含む。命令は、復調された信号に基づいてGNSSに割り当てられた周波数帯内の受信された信号に対する信号強度データを生成するための命令、および復調された信号に基づいて関心のある地点に対する位置を決定するための命令を含む。
(もっと読む)
位置検出システム
【課題】無線タグリーダによって無線タグの位置を追跡し得る位置検出システムにおいて、無線タグの電力消費を効果的に抑制する。
【解決手段】位置検出システム1において、無線タグリーダ10は、可変指向性アンテナ14を備えると共に、無線タグ50に対して電波の走査速度に関するデータを含む送信データを送信可能とされており、更に、無線タグからの電波を取得したときの可変指向性アンテナに対する電波の最大入射方向に基づいて無線タグ50の方位を追跡可能とされている。無線タグ50は、送信データに含まれる「走査速度に関するデータ」に基づいて、当該無線タグ50における周期的な電波送出時間帯を決定しており、その決定された電波送出時間帯に従い、アンテナ54を介して電波を周期的に送信している。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
21 - 40 / 221
[ Back to top ]