
Fターム[5J062FF02]の内容
Fターム[5J062FF02]に分類される特許
61 - 80 / 221
位置特定システム
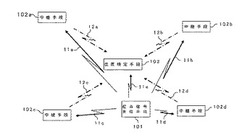
【課題】起点信号発信手段の位置を高精度で特定できる位置特定システムを安価に実現する。
【解決手段】起点信号を含む無線信号を、バースト信号として、間欠するための起点信号発信手段101と、起点信号を含む無線信号を、同一周波数を用いて、時分割であり、割付けられたタイムスロットで中継しあるいは再発信する複数の中継手段102a〜102dと、起点信号発信手段101、複数の中継手段102a〜102d、あるいはこれらの両方から無線信号を受信して位置を特定するための位置特定手段103とから構成される。
(もっと読む)
ヘディングを決定するためのシステムおよび方法

【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
撮像装置
【課題】ノイズ源の測位精度への悪影響を回避しながらも、画像を撮像したときの現在位置情報を取得することができる撮像装置を提供することを目的とする。
【解決手段】デジタルカメラ99は、自機の位置に関する情報を、該情報を含む電波を介して測位するGPS150と、被写体像を撮像し画像データを生成するCCDイメージセンサー104と、電波と干渉する駆動周波数40.5MHzと、電波と干渉しない駆動周波数44MHzのいずれかを用いてCCDイメージセンサー104による撮像の際の読み出し駆動周波数を制御するメインコントローラー110を備え、メインコントローラー110は、GPS150が測位していない間においては、駆動周波数40.5MHzにてCCDイメージセンサー104を制御し、GPS150が測位している間においては、駆動周波数44MHzにてCCDイメージセンサー104を制御する。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
携帯電子機器
【課題】携帯電子機器において、ユーザの注意を喚起する。
【解決手段】携帯電子機器1は、自身の現在位置の情報である現在位置データを取得する位置取得部17,18と、安全な場所と安全でない場所とを判別可能な地図データ31を記憶する記憶部20と、地図データ31に基づいて、現在位置データが示す現在位置が安全な場所内であるか否かを判定する安全性判定部42〜44と、現在位置が安全な場所内でないと判定された場合に報知を行う報知部13とを有する。
(もっと読む)
測位通信システム、及び撮像装置、及び測位装置
【課題】通信に要する消費電力を抑え、撮像した時刻の測位情報とともに撮像した画像を記録する。
【解決手段】撮像装置と測位装置で基準となる時刻の情報を同期させ、測位装置が測位して得られた測位情報を、測位した時刻の情報とともに測位装置内に順次記録する。そして、撮像装置で撮像を行った際、消費電力の少ない通信待機状態から復帰し、撮像した時刻の情報を測位装置に送信する。測位装置は、測位装置内に記録されている測位情報の中から、撮像した時刻の情報に対応した測位情報を取得し、測位情報に含まれる位置の情報を撮像装置に送信し、撮像装置は得られた位置の情報を撮像した画像に関連付けて記録する。
(もっと読む)
位置算出装置、位置算出方法及び位置算出プログラム
【課題】 局所領域ごとに算出された位置座標を1つの座標系に統合する。
【解決手段】 位置算出装置20の局所座標算出部230は、それぞれ複数のセンサから構成される複数の局所領域を検出し、各センサと送受信端末10との間の距離に基づいて、局所領域それぞれにおいて、当該局所領域を構成する複数のセンサの位置座標を算出する。統合領域抽出部241は、複数の局所領域のうち、所定数のセンサを共有する2つ以上の局所領域を、互いに統合可能な領域として抽出する。統合処理部242は、抽出された局所領域それぞれにおいて、センサ間距離及びセンサ間距離の信頼度を算出し、センサ間距離の信頼度によって重み付けを行なって重み付け補正後のセンサ間距離を算出し、前記重み付け補正後のセンサ間距離の加重平均に基づいて、局所領域を統合した座標系における各センサの位置座標を算出する。
(もっと読む)
ハンドヘルド測地デバイスによるグラフィクス支援遠隔位置測定
【課題】付加的な設置機器を使用せずに、位置を計測することが可能である測地デバイスを提供すること。
【解決手段】関心のある地点の位置を決定する装置であって、複数の衛星からの位置データを受信する少なくとも1つのアンテナと、該少なくとも1つのアンテナに結合される少なくとも1つの受信機と、画像データを獲得する画像化回路であって、該画像化回路は、光学センサと光軸とを含む、画像化回路と、配向データを獲得する配向回路と、該画像データおよび該配向データの表現を表示して、該装置を位置決定する際に使用者を支援するディスプレイと、該位置データ、該画像データおよび該配向データに少なくとも基づいて、該関心のある地点の該位置を決定する位置決定回路とを含む、装置。
(もっと読む)
自己位置取得装置、及び自己位置取得プログラム
【課題】省電力を図りつつ自己位置の測位・更新を行うことを可能にする。
【解決手段】GPS信号処理部により位置情報が取得できたか否かを判断する(ステップS9)。ステップS10での比較結果に基づき、今回取得した位置情報と直近の位置情報との差が所定の距離以上あるか否かを判断する(ステップS11)。差が所定以上ある場合には、GPS信号処理部の操作開始間隔を短くなるよう設定する(ステップS12)。今回取得した位置情報と直近の位置情報との差が所定の距離以上ではない場合は、GPS信号処理部の操作開始間隔をそのままで維持する(ステップS14)。ステップS9の判断がNOであって、GPS信号処理部により位置情報が取得できなかった場合には、GPS信号処理部を頻繁に動作させても無意味であることから、GPS信号処理部の動作開始間隔を長くするよう設定する(ステップS15)。
(もっと読む)
電子機器
【課題】 本発明では、GPS受信部をもつ撮像装置において、気的接続が容易で、ユーザーにGPS受信部の位置をわかりやすくすることによって、GPS受信時にユーザーが受信部を手で覆うことなく、外観のデザイン自由度を確保したまま、高い確率でGPSから位置、時間情報を取得することが可能な撮像装置を提供することを目的とする。
【解決手段】 製品天面に電波を遮蔽しやすい材質でできた外装カバーを持つ撮像装置において、前記外装カバーの一部に孔を空け、電波を遮蔽しにくい材質で別カバーを設け、別カバーの下に、GPS受信部を設ける。
別カバーの撮像装置把持側の少なくとも一部を、外装カバーよりも突出させる。
別カバーの少なくとも一部を導光部材にする。GPS受信部が実装された基板に、発光部を実装して、導光部に発光部の光が入射するようにする。
検出部を持ち、別カバーが押圧された場合に、押圧を検出させる。
(もっと読む)
測位組み合わせ決定システム
【課題】目標とする測位精度を達成可能な走行環境に合わせた好適な測位組み合わせを、対象とする走行環境内での実機実験なしに選択可能とする、即ち、低コストで目標とする測位精度を達成可能な測位組み合わせを決定する。
【解決手段】ビークルで用いる複数測位手段の組み合わせを決定するシステム(1)であって、走行環境中の場所毎に決定される測位精度影響パラメータを記憶する手段(7)と、測位精度影響パラメータと複数測位手段の測位精度との関係を記憶する手段(9)と、測位精度影響パラメータと複数測位手段との対応情報を記憶する手段(6)と、走行環境における測位精度影響パラメータを取得する手段(8)と、その測位精度影響パラメータの対応情報を取得し、その対応情報に基づいて前記関係を参照して走行環境中の各位置における複数測位手段の測位精度を予測する手段(10)と、を備え、複数測位手段の組み合わせに対する測位精度を予測する。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
(もっと読む)
壊滅的な構造物倒壊の際に電子デバイス群を利用して生存者の位置を特定するシステム及び方法
本発明は、人工構造物の倒壊後に生存者の位置を特定するシステム及び方法を提供する。無線送信機を備える複数の電子デバイスが構造物内に分散配置される。これらのデバイスはネットワークへと自己編成し、電子デバイスのうちの少なくとも1つの既知の位置を用いて電子デバイスの互いに対する3次元の位置を記録する。構造物が倒壊すると、少なくとも1つの付加的な電子デバイスをネットワークに導入し、付加的な電子デバイスの既知の位置を用いて電子デバイスの位置を再計算する。倒壊後、再計算された電子デバイスの位置を用いて生存者の可能性のある位置が求められる。 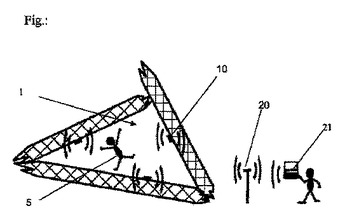 (もっと読む)
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
ネットワークセンサ装置
【課題】既存レーダシステムへの改修を最小限に抑えて、他センサシステム由来のセンサ情報と既存のレーダシステムの情報とを融合表示可能にする。
【解決手段】他センサシステム300からの時刻毎の当該他センサによる観測情報を、既存レーダシステム200の位置情報に基づいて既存レーダシステム向けの変換済他センサ観測情報に変換する情報変換部101と、センサ部203で観測し、表示部201で表示するようにした形式の自センサ観測情報を受信し、当該観測情報と変換済他センサ観測情報とを照合して自センサ観測情報の時刻列に合わせた時刻同期変換済他センサ観測情報を生成し、自センサ観測情報と時刻同期変換済他センサ観測情報の相関に従って観測対象の割り当てを行って融合センサ情報を算出し表示するために出力する融合部102を備える。
(もっと読む)
画像撮影システム、画像撮影装置およびその方法
【課題】撮影位置を適応的に可能な限り正確に検出して、撮影位置情報を画像情報に付加する。
【解決手段】本願開示の画像撮影装置は、撮影装置が使用可能な複数の位置検出用センサ(GPS176、方向センサ178,加速度センサ180および速度センサ182など)の内、画像撮影が行われている環境等に対応して、例えば、GPS信号が受信可能な位置においては、GPS176により位置情報を検出し、GPS信号が受信不可能な位置においては、その他のセンサにより位置情報を検出すると言ったように、使用されうる位置検出用センサの内、最適ないずれかが選択されるように構成されている。このように最適なセンサにより検出された位置情報は、カメラ150により撮影された画像に、指定された態様で付加され、表示あるいは記憶される。
(もっと読む)
衛星信号受信装置
【課題】特別な操作を行うことなくアンテナの指向特性を窓方向に向けるようにしてアンテナの受信強度を室内においても高める。
【解決手段】まず、アンテナ2で受信信号の信号強度を受信強度判定部17で推定する(ステップS2)。受信信号の信号強度が基準値を下回っているときは(ステップS3のY)、太陽光方向判定部15が太陽光の来る方向は受光素子6,7,8,9のうちのどちら側の方向であるかを推定する(ステップS4)。そして、その窓側に向いていると推定された受光素子6,7,8又は9に対応しているアンテナ2,3,4又は5が受信部16と接続されるように、スイッチ11,12,13又は14の何れかひとつを閉じる(ステップS5)。
(もっと読む)
撮像装置
【課題】 GPS受信部をもつ撮像装置において、撮像装置の通常使用時に、撮像装置上側の人体からのノイズの影響の小さい箇所に受信部を配置することを目的とする。
【解決手段】 撮像光学系を有する第一の筐体に対して回動可能な画像表示部を有する撮像装置において、GPS受信部を回動機構上部に配置する。
(もっと読む)
測位システム
【課題】高精度の測位ができ、かつ大きな情報量の識別子を伝達でき、さらに低コストで構築することができる測位システムを提供すること。
【解決手段】タグ1は、自タグのID情報を電波信号により送信し、該電波信号と同時または一定時間差で光点滅信号を送信する。リーダ装置の電波信号受信機3は、電子タグ1からの電波信号を受信する。カメラ2-1,2-2は、電子タグ1が存在する領域を撮影する。位置算出装置4は、カメラ画像における光点滅信号の位置から電子タグ1の位置を算出するとともに、光点滅信号と電波信号が受信されるタイミングの関係から、電子タグ1の位置に電波信号のID情報を対応付ける。
(もっと読む)
61 - 80 / 221
[ Back to top ]