
Fターム[5J062FF02]の内容
Fターム[5J062FF02]に分類される特許
101 - 120 / 221
電子機器
【課題】測位機能を備える電子機器を省電力化する。
【解決手段】電子機器1は、位置情報を取得する測位手段20と、測位手段20で取得された新たな情報を記憶する記憶手段20bと、主要回路部12,13,14,15,16,17,18と、主要回路部12,13,14,15,16,17,18に対する電池からの電力供給のオン/オフを指示する電源スイッチ21と、電源スイッチ21がオフ操作されている状態で、測位手段20に対して起動と該起動後の停止とを第1所定時間ごとに繰り返させる制御手段19とを備える。
(もっと読む)
音響計測用観測船及び音響計測システム

【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
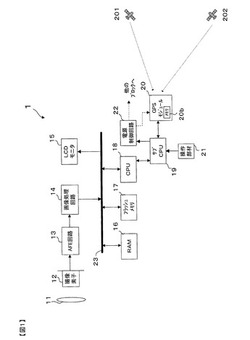
カメラのための衛星測位
カメラによる写真の捕獲の位置を推定するための衛星信号を受信する方法。この方法は、写真の捕獲のタイミングに関係する信号を受信するステップと、ゼロではない持続時間の間隔にわたり待機するステップと、間隔の後、衛星信号を受信するステップとを含む。 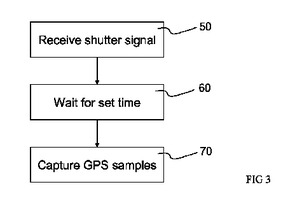 (もっと読む)
(もっと読む)
測位装置、測位システム、測位装置の制御方法、測位システムの制御方法、測位装置の制御プログラム及び測位システムの制御プログラム
【課題】マルチパスによる影響を判断するときに、マルチパスの信号を検出する方法の場合、実環境でマルチパスを正確に検出することが困難であることから、その効果は小さく測位精度も低いものとなる可能性がある。
【解決手段】測位装置10の全周囲の画像を撮像し、その画像に仰角及び方位角の情報を付加した周囲位置画像を生成する。次に、各GPS衛星の仰角及び方位角の情報を含む衛星位置画像と、この周囲位置画像とを重ね合わせて、各GPS衛星についての受信環境を示す受信環境情報を生成する。そして、この受信環境情報に基づいてGPS衛星を選択して測位処理を行う。
(もっと読む)
低周波電磁信号に応答した衛星ナビゲーション受信機制御
いくつかの実施形態に従った、可搬型電子デバイスの中の衛星ナビゲーションシステム(SNS)受信機を動作させる方法は、電線路に関連する低周波信号が存在しているか存在していないかを判定するステップと、電線路に関連する低周波信号の検出に応答してSNS受信機をディスエーブルするステップとを含む。本方法は、衛星ナビゲーション信号の低下を検出するステップをさらに含むことができ、電線路に関連する低周波信号が存在しているか存在していないかの判定は、検出した衛星ナビゲーション信号の低下に応答して実行してもよい。関係したデバイスもまた開示される。 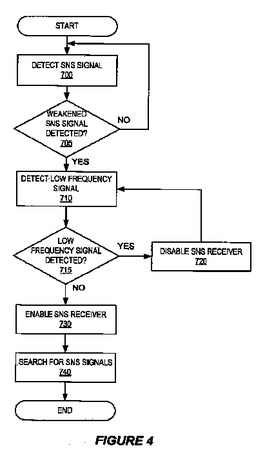 (もっと読む)
(もっと読む)
位置決定方法および位置決定装置
携帯型装置の位置を決定する方法は、その携帯型装置によって検出可能な無線通信装置の識別情報を、決定されるべき特定の位置で入手し、それにより識別情報の1つの集合を入手するステップを含む。識別情報のその集合は、1つまたは複数の調査結果を選択するために、複数の調査結果を記憶するデータベースの内容と比較され、各調査結果は、1つの参照位置と、その位置で観測された無線通信装置の識別情報の1つの集合とを含んでいる。携帯型装置の位置は、選択された調査結果の処理に基づいて発見される。 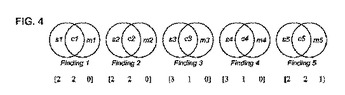 (もっと読む)
(もっと読む)
位置標定装置、位置標定システム、位置標定システムのユーザインタフェース装置、位置標定システムの標定サーバ装置および位置標定方法
【課題】車両が走行した位置を高精度に測位する。
【解決手段】位置姿勢標定装置100は、走行中の車両で取得された観測データ201、画像データ203およびレーザデータ205と予め位置が測量されている地物位置データ204とに基づいて車両の位置姿勢を標定する。地物DB検索GUI部120は、ユーザが指定した画像データ203を表示画像として表示し、地物位置データ204に基づいて撮像地域の地図を表示する。ユーザはランドマークが映っている画素とその地図表記とを指定する。三次元点群投影検索部140はレーザデータ205に基づく三次元点群モデル206を表示画像に投影し、指定画素に最も近い投影点を特定する。地物車両位置差分演算部150は投影点に対応するレーザデータ205を取得する。そして、車両位置姿勢標定部160はランドマークの既知座標とレーザデータ205が示す距離方位とに基づいて車両の位置を標定する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
車両位置特定装置
【課題】直接波を受信可能な衛星の数が少ない場合においても車両の位置を十分な精度で特定可能な車両位置特定装置を提供すること。
【解決手段】複数のアンテナ素子における受信波の位相及び受信波に含まれている信号に基づき各衛星からの電波到来方向と衛星方位が一致するか否かを判定し、一致すると判定した衛星の数が所定数以上である場合は電波到来方向と衛星方位が一致すると判定した衛星からの電波に含まれている信号により算出される伝播経路長を用いて車両の位置を算出し、所定数未満である場合は電波到来方向と衛星方位が一致すると判定した衛星からの電波に含まれている信号により算出される伝播経路長と電波到来方向と衛星方位が一致しないと判定した衛星からの電波に含まれている信号に補正値を加味して算出される伝播経路長とを用いて車両の位置を算出する算出手段を備える、車両位置特定装置。
(もっと読む)
カメラ
【課題】 従来のカメラは、GPSアンテナが真上からある角度範囲以外では測位用電波が受信できない死角が存在し、ある姿勢の時に測位用電波の良い受信状態が得られても、姿勢を変えると受信状態が悪くなることがある。
【解決手段】 制御装置23は、姿勢センサ24の検知結果に基づき、測位用電波を受信しやすい天空部の方位に最も近い方位を向いたアンテナ13,14,15の出力を切替回路21に選択させる。このため、撮影時においてカメラ1の姿勢が横位置姿勢および縦位置姿勢のいずれの姿勢であっても、測位用電波を良好に受信することが可能になり、真上からある角度範囲以外では測位用電波が受信できないような、従来のカメラにおける死角は存在しなくなる。
(もっと読む)
歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法
【課題】歩行者の位置を精度良く特定するための歩行者の歩幅を算出する歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法を提供する。
【解決手段】相関パラメータ算出部172は、歩行者の歩幅と一歩毎の歩行速度との相関パラメータを算出する。2地点間の歩行距離をd、2地点間の歩行者の歩数をn、2地点間の一歩毎の歩幅の列をwi(i=1、2、…n)、2地点間の一歩毎の歩行速度の列をvi(i=1、2、…n)とすると、歩幅と歩行速度との相関関係は、d=Σwi=α・Σvi+n・βで表わすことができる。ここで、α、βは相関パラメータである。歩幅算出部173は、距離センサ132等で歩数及び一歩毎の歩行速度を取得し、取得した歩数及び歩行速度と相関パラメータα、βとにより一歩毎の歩幅を算出する。
(もっと読む)
車載用ナビゲーション装置
【課題】車速パルスを用いずとも正確な車速を算出することによってGPS信号の受信が不可能な地点における自車位置を高精度に算出することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車速(GPS受信不能期間の直前におけるGPS信号に基づいて算出された第1の車速a)と、映像速度(GPS受信不能期間の開始時における車載カメラの撮影映像に基づいて算出された映像速度b)との相関関係(速度比K)が、GPS受信不能期間においても維持されるとみなした上で、速度比KにGPS受信不能期間内における映像速度b’を乗じることによって、擬似的な第1の車速として第2の車速a’を算出し、この第2の車速a’を自律航法に用いる。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を特定する特定精度の向上を計ることができる位置特定装置、位置特定装置を実現するコンピュータプログラム及び位置特定方法を提供する。
【解決手段】信号機が設置された交差点に関する交差点情報に基づいて歩行者の位置を特定する位置検出装置10であって、交差点情報を受信し、受信した交差点情報に基づいて、交差点の位置を取得する。また、信号機が青信号と赤信号とを切り替える信号切替タイミングを、受信した交差点情報に基づいて取得する。操作部16から操作を受け付けたタイミングが、取得した信号切替タイミングと合致するか否かを判定し、合致する場合、歩行者の位置を、交差点の位置と特定する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性があるか否かを判定する。可能性の有無は、例えば、歩行の開始、歩行の停止、歩行速度の変動等により判定することができる。位置特定部174は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性がある場合、歩行挙動と交差点に設置された信号機の信号切替タイミング又は踏切に設置された警報タイミングとが合致するか否かを判定し、合致する場合には、歩行者の位置を横断歩道付近又は踏切付近に特定する。例えば、横断歩道を有する交差点に設置された信号機の青信号点灯開始時点に、歩行挙動が歩行開始であるとき、歩行者の位置を横断歩道付近に特定する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法
【課題】送信機からの電波の回折度合いを推定し、推定結果に応じて車両の位置を精度良く特定することができる電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法を提供する。
【解決手段】制御部30は、周辺車両300の形状情報、位置情報を取得し、自車両の予測位置を求め、送信機200との仮想直線を特定する。制御部30は、送信機200からの電波を受信して電波測位位置を求める。制御部30は、周辺車両300の形状情報、車間距離、仮想直線などに基づいて周辺車両300による仮想遮蔽面を特定し、仮想遮蔽面と仮想直線などに基づいて電波の回折角度θを算出する。制御部30は、算出した回折角度に応じて重み付け係数を設定し、設定した重み付け係数、予想位置及び電波測位位置に基づいて、自車位置を特定する。
(もっと読む)
カメラ支援を伴うGNSS方法及び受信機
ポータブル・デバイスにおいてナビゲーション情報を計算する方法であって、複数のナビゲーション衛星からナビゲーション信号を受信するよう構成されたGNSS受信機と、ナビゲーション信号からGNSSポジション情報を抽出するGNSSプロセッサとを備える方法。このGNSS受信機は更に、カメラ・モジュールから画像データを取得するよう構成されている。この方法は、カメラ・モジュールからポジション情報のセットを導出することと、カメラによって導出されたポジション情報を、ナビゲーション・プロセッサに提供することと、GNSS受信機のポジション・フィックスを生成するために、カメラによって導出されたポジション情報のセットとナビゲーション信号とを使用することと、生成されたポジション・フィックスに基づいて、ナビゲーション情報を計算することとから成る各ステップを備える。 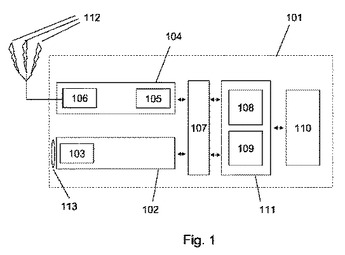 (もっと読む)
(もっと読む)
衛星信号受信装置、計時装置および衛星信号受信装置の衛星信号受信方法
【課題】ピーク電流を制御でき、電池寿命の長時間化や小型化が可能となり、電圧低下によるシステムダウンも回避できる衛星信号受信装置の提供。
【解決手段】GPS付き腕時計1は、捕捉した位置情報衛星から送信される衛星信号を受信する受信部10と、受信した衛星信号に基づいて時刻情報および測位情報を取得可能な制御部20と、受信部10の受信モードを、時刻情報受信モードまたは測位情報受信モードに少なくとも制御する受信モード制御部30とを備える。受信部10は、衛星信号を捕捉するコードと受信した衛星信号との相関を取得する相関部132を備える。制御部20は、受信データをデコード処理する演算部21を備える。受信モード制御部30は、相関部132の動作クロックおよび演算部21の処理クロックを、各受信モードに基づいて個別に制御するクロック制御部31を備える。
(もっと読む)
測位装置
【課題】時計誤差の補正用の送信局を用いず自機内の独自の処理によりセンサ間の時計誤差の補正を可能にする測位装置を得ることを目的とする。
【解決手段】複数のセンサで複数回受信した、目標が放射または反射した電波、音波または光波の到来時間とドップラ周波数に基づいて、それぞれセンサ間の受信波の到来時間差とドップラ周波数差を算出する差分算出手段と、上記算出された到来時間差に基づいた、かつセンサ間の時計誤差の補正を加えた目標の位置を算出する方程式と、上記算出されたドップラ周波数差に基づいた目標の位置と速度を算出する方程式を連立させて目標の位置と速度およびセンサ間の時計誤差を算出する測位手段を備えたものである。
(もっと読む)
衛星測位装置
【課題】途切れなく測位を行うことのできる「衛星測位装置」を提供する。
【解決手段】P1まで進行した時点で、ナビゲーション装置11によって、近い将来の上方閉塞空間への進入が予測されたならば、アシスト測位制御部15は、無線通信装置17とGPS受信機16を制御して、GPS受信機16と測位サーバ4との接続を確立する。そして、その後、地点Sで上空閉塞空間400に進入し、上空閉塞空間400内をP2まで進んだ時点で、GPS受信機16のCN比が劣化し所定のしきい値TH未満となったならば、アシスト測位制御部15は、GPS受信機16にアシスト測位モードを設定する。アシスト測位モードを設定された、GPS受信機16は、地点P1で既に接続が確立している測位サーバ4から補助データの取得を直ちに開始して、ネットワークアシスト方式の測位を行う。
(もっと読む)
101 - 120 / 221
[ Back to top ]