
Fターム[5J062FF02]の内容
Fターム[5J062FF02]に分類される特許
141 - 160 / 221
カメラ、測位装置およびカメラシステム
【課題】測位するカメラの消費電力を低減する。
【解決手段】カメラ10は、遮光部材によって撮影光学系Lが遮光されているか否かを検出する検出手段118と、自己位置を示す情報を取得する測位手段114,108と、検出手段118によって遮光が検出されなくなると測位手段114,108へ測位を指示する制御手段108とを備える。
(もっと読む)
位置特定装置、位置特定方法および位置特定プログラム

【課題】車両位置を高精度に算出することを目的とする。
【解決手段】擬似距離測位部210は擬似距離測位により測位位置Aを得る。白線データ取得部221は測位位置Aの周辺に位置する各白線の三次元座標データを取得する。白線データ撮像面投影部222は各白線データをカメラ撮像面に投影する。映像白線抽出部223はカメラ映像から白線を抽出する。特徴量投影部224は各撮像面白線データと映像白線データとの特徴量を算出し、特徴量相関係数算出部225は各撮像面白線データを映像白線データと比較し、相関係数判定部226は映像白線データに対応する撮像面白線データを特定する。車両位置算出部227は、カメラ映像における当該白線の二次元位置に当該白線データが示す三次元座標を当てはめ、焦点距離や画角や設置角などのカメラの特性に基づいて、車両位置を算出する。
(もっと読む)
車両位置特定装置および車両位置特定方法
【課題】ユーザに負担を強いることなく位置測位精度を向上し、かつ測位精度に応じて適切なサービスを提供すること。
【解決手段】 GPSレシーバ11が準天頂衛星を利用して高精度な測位を行ない、その測位結果と路側機30が画像認識によって特定した自車両の位置とを比較することで、GPSレシーバ11の車体に対する相対位置を特定すると共に、相対位置情報の信用度を求め、信用度に応じてユーザに提供する位置情報利用サービスを選択する。そのため、ユーザに負担を強いることなく位置測位精度を向上し、かつ測位精度に応じて適切なサービスを提供することができる。
(もっと読む)
測位システム
【課題】複数の移動局間の距離が測定可能とする場合に、測定された複数の移動局間の距離を用いて移動局の測位の精度の向上する。
【解決手段】測位部による測位結果に基づいて移動局の位置に対する存在確率を算出する存在確率算出部と、第1の測距部よりも高い測距精度を有し複数の移動局間の距離を測定する第2の測距部と、第2の測距部により測定される複数の移動局間の距離に基づいて複数の移動局の位置の組み合わせを抽出する移動局位置抽出部と、前記存在確率に基づいて前記複数の移動局の位置の組み合わせに対応する確率評価値を算出するとともに、最も確率評価値が高い複数の移動局の位置の組み合わせを選択する移動局位置選択部と、測位部による測位結果である複数の移動局位置を移動局位置選択部によって選択された移動局の位置の組み合わせとなる様に補正する移動局位置補正部とを設ける。
(もっと読む)
通信システム、車載機、車両及び送信機
【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めつつ所定位置まで到達することができる通信システム、車載機、送信機及び車両を提供する。
【解決手段】車載機20で領域Rにおける自車の位置を高精度に取得し、停止線Pまでの距離を高精度に算出する。また、車載機20は、送信機30、40、50から送信された信号の到達時間差、送信機30、40、50までの距離に基づいて、送信機30、40、50が送信する信号の周期の同期ずれを算出する。その後、自車が走行を続け、任意の走行地点で、送信機30、40、50から送信された信号の到達時間差、算出した同期ずれ及び送信機30、40、50の位置情報に基づいて、自車位置を特定する。
(もっと読む)
変位計測装置
【課題】低コストで、かつ高精度を実現することができる変位計測装置を得る。
【解決手段】変位計測点に設置された発信機1と、位置が既知である固定点に設置され、前記発信機1からの電波を受信する複数の受信アンテナ2と、前記複数の受信アンテナ2を切り替えるスイッチ3と、前記スイッチ3で選択された信号が入力される信号処理装置14とを設け、前記信号処理装置14は、前記スイッチ3で選択された、所定の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、次に前記スイッチ3を切り替えて別の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、これを繰り返すことにより得られた多数の受信アンテナの組み合せでの位相差を用いて、前記発信機1の位置を計算する。
(もっと読む)
作業管理システム、作業管理方法、及び管理計算機
【課題】従来は、作業員の動作・位置と商品等の動き・位置を同時に正確に把握できず、正しい作業内容の把握・評価ができないという問題があった。この問題を解決し、作業管理とさらに品質管理も実現できるシステムを提供する。
【解決手段】センサネットワークを利用し、第1のセンサノードにより作業員の動作情報および位置情報を取得し、第2のセンサノードにより物品の状態情報と位置情報の少なくとも一方を取得し、これらの取得情報を組み合わせて、作業員の動作解析、作業内容の特定、作業状況評価を行うことを特徴とする。
(もっと読む)
移動体位置測位装置
【課題】測位モードを適切に切り替えて精度の高い測位を行うこと。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号のコード位相に基づいて移動体の位置を測位する第1測位手段と、前記移動体の位置に関する情報を取得する位置情報取得手段と、前記位置情報取得手段により取得された位置情報と、衛星からの搬送波の周波数のドップラ成分の計測値とに基づいて、移動体の位置を測位する第2測位手段と、前記第1測位手段による第1測位モードと前記第2測位手段による第2測位モードとを切り替えるモード切替手段とを備え、前記モード切替手段は、前記位置情報取得手段により所定レベル以上の信頼性の高い位置情報が取得された場合に、前記第1測位手段による第1測位モードから前記第2測位手段による第2測位モードに切り替えることを特徴とする。
(もっと読む)
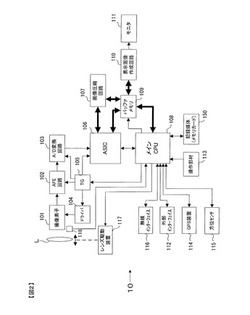
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 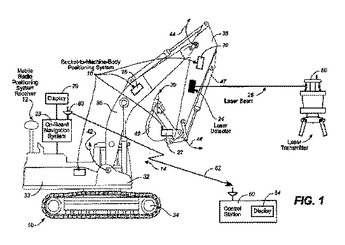 (もっと読む)
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
衛星/レーザ測位システムにおいて高さ座標を正確に決定するための方法および装置
【課題】受信した衛星信号および受信したレーザ信号から位置座標を生成することが可能な衛星/レーザ測位システムにおいて信号を処理するための方法および装置を提供すること。
【解決手段】レーザ信号が利用可能である期間中は、高さ座標バイアス値がフィルタ・プロセッサによって維持される。高さ座標バイアス値は、衛星信号から導出された高さ座標とレーザ信号から導出された高さ座標との間の推定差を表す。レーザ信号が利用可能である期間中は、レーザ信号から導出された高さ座標が出力される。レーザ信号が利用できない期間中は、高さ座標バイアス値を衛星信号から導出された高さ座標に加えることによって、補正された高さ座標値が生成される。
(もっと読む)
イメージファイル管理装置および方法
【課題】イメージファイル管理装置および方法を提供する。
【解決手段】イメージファイル管理装置は所定の被写体を撮影した位置、方向および角度のうち少なくとも何れか一つを測定するセンサ部と測定された情報に対応する撮影場所および撮影された被写体に関する情報のうち少なくとも何れか一つを抽出する抽出部および抽出された情報を利用して撮影されたイメージファイルにネームを付与する分類部を含む。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
GPSの精度を自動的に向上するナビゲーション装置
本発明は、位置測定装置から位置情報を受信するように構成されるプロセッサを具備するナビゲーション装置に関する。プロセッサは、運動検出器から運動情報を受信し、前記運動情報を使用して前記装置が静止中であるかを判定するように更に構成される。装置が静止中であると判定された場合、プロセッサは、装置が静止中である期間に位置測定システムから受信される連続した位置に関する情報を使用してある期間にわたる平均位置を計算する。平均位置は、ユーザに命令を与える等のナビゲーションの目的で使用される。静止中に平均することにより、更に適切な命令を与えるために使用される更に正確な位置が判定される。 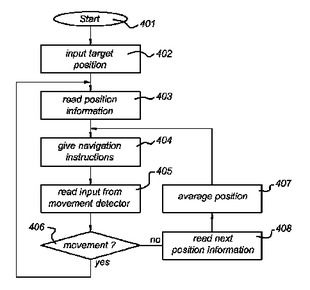 (もっと読む)
(もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 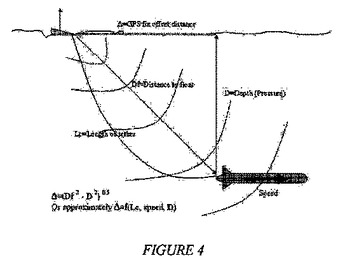 (もっと読む)
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
レーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法
【課題】 レーザ通信装置同士を対向するようにその姿勢を制御し、通信可能とするレーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法を提供することを目的とする。
【解決手段】 レーザ通信装置1から送信されたGPSデータに基づいて、レーザ通信装置の位置情報を演算し、2つのレーザ通信装置1の位置情報に基づいて、それぞれの通信相手側のレーザ通信装置1の補正領域29を演算し、それぞれの補正領域29に複数の計測点31,32を設定し、この計測点31,32にレーザ3の光軸が向かうようにレーザ通信装置1の制御角を演算し、前記制御角においてのレーザ3のゲイン値を取得し、当該ゲイン値を角度とともに記憶し、記憶されているゲイン値の中からゲイン値が最も高いときの方位角及び仰角に姿勢を制御する。
(もっと読む)
測位システム、および携帯端末
【課題】GPSを利用して自機の位置を測位する方式がMS−Assisted型である携帯端末がセンタに接続できない状況であっても、測位結果を取得することができ、且つこの測位結果を他の携帯端末で利用することができる測位システムを提供する。
【解決手段】携帯電話1は、GPS衛星3から受信したGPS信号を、近距離無線通信でディジタルカメラ2に送信する。ディジタルカメラ2は、携帯電話1から送信されてきたGPS信号を処理して、この携帯電話1の位置を測位し、測位結果を携帯電話1に返信する。また、今回測位した携帯電話1の位置を自機の位置としても記憶する。
(もっと読む)
電子機器及び電子機器の時刻修正方法
【課題】消費電力が高くならず、且つ、高精度な時刻修正が可能な電子機器等を提供すること。
【解決手段】地球を周回する位置情報衛星等を捕捉して、前記位置情報衛星からの信号を受信する受信部であるGPS装置23と、前記GPS装置23が受信した衛星信号に基づいて時刻修正情報を生成し、前記時刻修正情報に基づき表示時刻情報を修正して表示する時刻表示部と、を有する電子機器であるGPS付き腕時計10であって、前記GPS装置23は、前記GPS付き腕時計10の環境を判断する屋内外判断部としてソーラパネル式充電装置24と加速度センサ出力波形生成装置29を備え、前記屋内外判断部に基づいて、屋外と判断された場合に前記位置情報衛星等を捕捉する構成となっている。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
141 - 160 / 221
[ Back to top ]