
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
21 - 40 / 523
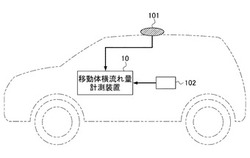
移動体横流れ量計測装置及び方法
【課題】移動体の横流れ量を高精度に計測することができる移動体横流れ量計測装置及び方法を提供すること。
【解決手段】移動体横流れ量計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した計測開始時の速度から計測開始時の方向を算出し、算出した水平方向の速度を方位ごとに積算して東西南北方向の相対距離を算出し、算出した方位ごとの相対距離を、計測開始時の方向を基準とした座標系の距離に変換する。さらに、移動体横流れ量計測装置10は、水平方向の速度を積算して移動距離を算出し、算出した移動距離と、変換された座標系の距離のうち横流れ量を示す距離とを対応させて表示器1022に表示する。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法

【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
視界の外にある移動する対象の情報を視界を投影する機器画面上に重畳して表示するシステム
【課題】 視界の外にある移動する対象の情報を視界を投影する機器画面上に重畳して表示する拡張現実提示システムを提供すること。
【解決手段】 携帯型多機能機器1(103)及び携帯型多機能機器2(104)の距離が予め定めた距離を超えた際、視界の外にある対象の現在地の位置をユーザの所持する機器の表示部202に重畳して表示することができる。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
自動車を発見しかつ追跡するためのデバイス
【課題】衛星ナビゲーションに基づいた乗り物の発見・追跡デバイスを改善すること。
【解決手段】本発明は乗り物の発見及び追跡のためのデバイスに関し、前記デバイスは、
現在の乗り物の位置を決定するための位置決定デバイス(12)と、
通信チャネル(18)を介して現在の乗り物の位置を受信器(16)へ送信するための送信デバイス(14)と、
動作中の妨害送信器を発見するため及び妨害送信器(30)の発見が特定のアクションをトリガするための手段(20、26、28)と、を有する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した新たな位置算出手法の提案。
【解決手段】衛星測位用ユニット3の第1の計測結果と慣性測位用ユニット5の第2の計測結果とを用いて、カップリング処理部7がカップリング処理を行う。そして、信号捕捉支援情報演算部9が、カップリング処理の結果を用いて、カップリング処理において不使用の衛星信号を捕捉する場合のドップラー周波数(信号捕捉支援情報)を推定する。そして、衛星測位用ユニット3が、信号捕捉支援情報演算部9により推定されたドップラー周波数を用いて不使用の衛星信号を捕捉する。
(もっと読む)
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性測位用ユニット及び衛星測位用ユニットそれぞれの計測結果を併用して、位置をより正確に算出するための手法の提案。
【解決手段】位置算出装置1において、移動体に設置された慣性測位用ユニット2の計測結果を用いて、少なくとも移動体の位置を演算する第1の演算処理が第1の演算処理部5により実行される。また、第1の演算処理の結果と、移動体に設置された衛星測位用ユニット3の計測結果とを用いて、移動体の位置を演算する第2の演算処理が第2の演算処理部7により実行される。そして、第1の演算処理の結果と、第2の演算処理の結果とを用いて、第1の演算処理に係る演算係数が演算係数調整部9により調整される。
(もっと読む)
携帯電子機器
【課題】より高い精度で他の通信端末の位置を特定することができる携帯電子機器を提供すること。
【解決手段】通信部で基準通信端末を介した通信または近距離通信部での通信により対象通信端末と当該基準通信端末との第1距離を算出し、通信部で基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、近距離通信部での通信により対象通信端末と自機との第3距離を算出し、位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、第1距離、第2距離および第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて対象通信端末の位置を検出する予測位置算出処理を実行することで上記課題を解決する。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
端末位置判定装置および端末位置判定システム
【課題】車車間通信や歩車間通信によって端末間でやり取りされるGPS位置情報のような衛星を用いた位置情報の信頼度を判定する構成を提供する。
【解決手段】車車間通信部32が受信した他の端末のGPS位置情報と取得部33が取得した他の端末の移動速度および走行方向に基づき、推定部34によりGPS位置情報に基づく他の端末の存在位置を基準にして、つぎの時刻の他の端末の存在位置を推定し、判定部35により、推定部34が推定した他の端末のつぎの時刻の推定位置と、車車間通信部32がつぎの時刻に受信したGPS位置情報に基づく他の端末の存在位置との一致度に基づいて、他の端末から受信するGPS位置情報の信頼度を判定する。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
油圧ショベルの較正装置及び油圧ショベルの較正方法
【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正装置及び較正方法を提供する。
【解決手段】油圧ショベルの較正装置は、入力部63と、第1較正演算部65cと、第2較正演算部65dと、を備える。入力部63は、作業点位置情報とアンテナ位置情報とが入力される部分である。作業点位置情報は、外部計測装置で計測された作業点の複数の位置での座標を示す。アンテナ位置情報は、外部計測装置で計測されたアンテナの位置の座標を示す。第1較正演算部65cは、入力部63に入力された作業点位置情報に基づいて、数値解析により作業機パラメータの較正値を演算する。第2較正演算部65dは、入力部63に入力されたアンテナ位置情報に基づいてアンテナパラメータを較正する。
(もっと読む)
21 - 40 / 523
[ Back to top ]