
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
121 - 140 / 523
測位装置、軌跡情報記憶方法、プログラム
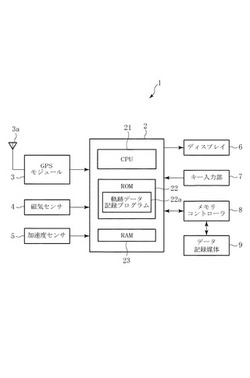
【課題】移動軌跡を示す軌跡データを間引かなくとも移動軌跡を示す軌跡情報を効率よく圧縮して記録できるようにする。
【解決手段】
CPU21は、GPSモジュール3により計測された位置情報を、第1の時間間隔で、移動軌跡を示す軌跡情報としてRAM23に保存する。また、第1の時間間隔で位置情報をRAM23に保存する間、CPU21は、第2の時間間隔で、磁気センサ4及び加速度センサ5の検出値データに基づき、第2の時間が経過する間における現在位置の変動量を示す位置変動情報を取得する。そして、CPU21は、取得した位置変動情報を、移動軌跡を示す軌跡情報としてRAM23に保存する。第2の時間間隔でRAM23に保存する個々の軌跡データのデータ量を削減することにより移動軌跡を示す軌跡情報を効率よく圧縮する。
(もっと読む)
被捜索物の位置特定方法及びシステム

【課題】被捜索物の位置を特定するための方法及びシステムを提供する。
【解決手段】携帯装置11内に組み込まれたサーチデバイスD1と被捜索物に付属されたターゲットデバイスD2を有し、サーチデバイスD1は互いに離間されたアンテナA1,A2が付属されたトランシーバ、方向を指示するための表示装置、当該トランシーバ及び表示装置を管理する電子装置を有し、ターゲットデバイスD2はアンテナA3と前記サーチデバイスから発信された信号の受信を検出し、その信号に応答できる電子装置が付属されたトランシーバを有し、サーチデバイスD1とターゲットデバイスD2間の信号はUWB信号であり、ターゲットデバイスD2は、ウェークアップ信号が、識別コードを包含する時にウェークアップ信号を受信するウェークアップ受信機を有する。
(もっと読む)
測位データ評価装置、測位データ評価方法および測位データ評価プログラム
【課題】GPSなどの測位衛星で得られた測位データから計測誤差が大きい測位データを検出できるようにすることを目的とする。
【解決手段】連続解グルーピング部110は各時刻のGPS測位データを連続解毎にグループ分けする。前後解抽出部121は各時刻のGPS測位データから連続解の前後解を抽出する。棄却候補抽出部122は前後解のFIX衛星数に基づいて棄却候補の連続解を判定する。棄却候補提示部130は棄却候補の連続解を利用者に提示する。棄却候補棄却部140は利用者に指定された棄却連続解を棄却する。棄却連続解補完部150は棄却連続解に対応する時間の測位データを補完する。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】測位要求に応じて位置データを求める際に、測位衛星を利用した位置の測定が適切に遂行できなかった場合でも、位置データの欠落が生じることのない測位装置、測位方法およびプログラムを提供する。
【解決手段】測位要求がなされた際に、測位衛星を利用した位置の測定を実行させ、この位置の測定が遂行された場合に、この測位結果データを前記測位要求に応じた位置データとして取得する(S43,S44)一方、測位衛星を利用した位置の測定が遂行されなかった場合には、移動方向と移動量とを計測に基づく位置の測定結果データを測位要求に応じた位置データとして取得する(S42,S48)構成とする。
(もっと読む)
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
現在位置特定装置およびプログラム
【課題】GPS受信機を位置検出のための他の装置と併用する環境において、GPS受信機の消費電力低減を実現する新規な技術を提供する。
【解決手段】車両用ナビゲーション装置は、自律航法用のための信号を出力するセンサから出力される信号の値と車両の現在位置との間の関係式を用いて、センサが出力された信号に応じた前記車両の現在位置を算出し、また、GPS受信部が出力した信号に基づいて、間欠的に、前記関係式を補正する。また、車両用ナビゲーション装置は、関係式を補正したことに起因して(ステップ130)、GPSアンテナおよびGPS受信部への電力供給を一時的に停止させ(ステップ145)、その後、復帰条件が満たされたことに起因して、停止している前記電力供給を再開させる。
(もっと読む)
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示する。
【解決手段】GPS受信手段に基づいて現在位置を算出し、現在位置マークを表示する現在位置表示装置において、前記現在位置表示装置は、前記GPS受信手段によりGPS信号が受信できなくなった後、再度前記GPS信号が受信されると前記現在位置算出手段により前記再度GPS信号が受信された現在位置が算出され、該算出された現在位置と前記現在位置マークの位置とが所定距離以上離れているか否かを判定する位置比較手段を備え、前記表示位置決定手段は、前記位置比較手段が所定距離以上離れていると判定した場合、前記現在位置マークの位置を前記現在位置算出手段により算出された現在位置に段階的に近づくように移動させる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 任意のタイミングで測位処理を実行する場合でも、短時間に位置の測定を完了することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS衛星から送られてくる信号を受信する受信手段と、計時を行う計時手段と、受信されたエフェメリス情報を記憶する記憶手段と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段と、間欠的なタイミングTE1,TE2,TE3でエフェメリス情報を受信させる第1受信制御手段と、間欠的なタイミングTC1,TC2,TC3,TC4で時刻情報を受信させる第2受信制御手段とを備え、位置測定タイミングT1において計時手段の計時時刻に基づき同期をとりながらGPS衛星の送信信号を捕捉し、この送信信号と前記記憶手段に記憶されているエフェメリス情報とに基づいて位置の測定を行う。
(もっと読む)
携帯端末および位置測位方法
【課題】端末の測位負荷を軽減することができる携帯端末および位置測位方法を提供する。
【解決手段】GPS測位部101が所定周期若しくはユーザ指示に従って、位置測位を行っている。そして、その測位を行うにあたって、制御部105は携帯端末100の移動状態を判断する。制御部105は、携帯端末100は静止状態であって、状態情報管理テーブル106bに記憶されている状態情報を参照して、携帯端末100は直近に測位した位置から移動していないことを判断すると、位置情報記憶テーブル106aに記憶されている直近に測位された位置を、携帯端末100の現在位置として、位置情報記憶テーブル106aに記憶させることができる。
(もっと読む)
制御装置、プログラム及び制御方法
【課題】対象物の移送状況に応じて適切な省電力が可能となる制御装置等を提供する。
【解決手段】工作機械3に取り付けられた制御装置2は測位装置を制御する。制御装置2は速度及び振動情報を取得する。制御装置2は取得した速度が所定速度を超える場合に、第1状態と判断する。第1状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期へ変更する。取得した速度が所定速度以下の場合には、第2状態と判断する。第2状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期より短い第2周期へ変更する。第2状態へ移行した後、取得した速度が所定速度を超える場合、制御装置2は第1状態へ移行する。第2状態へ移行した後、取得した振動情報が予め記憶した振動パターンにマッチした場合、制御装置2は第3状態と判断する。
(もっと読む)
ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング
本明細書で開示する例は、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとに関し得る。 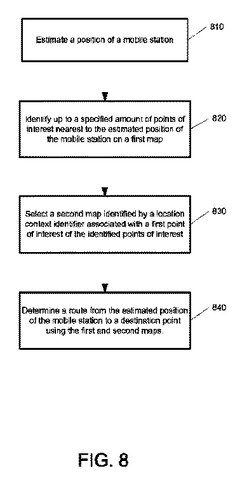 (もっと読む)
(もっと読む)
現在位置表示装置
【課題】GPS信号に基づく現在位置算出に要する時間だけ後の現在位置表示装置の推定位置を求め、この推定位置を現在位置として表示する。
【解決手段】現在位置表示装置1は、GPS衛星信号を受信し所定の演算時間後に現在位置表示装置1の位置をGPS測位位置として算出するGPS受信機11と、現在位置表示装置1の速度を検出する速度検出手段13と、GPS測位位置の履歴を記憶する測位位置記憶手段15と、前記速度検出手段13により検出された現在位置表示装置1の速度と、前記GPS測位位置とから、前記演算時間だけ後の現在位置表示装置1の位置を推定位置として算出する制御手段10と、前記推定位置に基づいて現在位置表示装置1の位置マークの表示位置を調整する表示制御手段19と、を備える。
(もっと読む)
衛星測位システム受信機測位信頼度評価装置
【課題】衛星測位システムの受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置の提供。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
(もっと読む)
測位装置
【課題】受信環境改善時にGPS衛星信号を速やかに捕捉するのに好適な測位装置を提供すること。
【解決手段】測位装置を、受信チャンネルの再生周波数を構成する基準クロックを発生する手段と、再生周波数がGPS衛星信号のキャリア周波数と一致するように基準クロックの補正値を変更していくことによって該再生周波数を調節する手段と、最後の測位時に設定されていた補正値を保持する手段と、現在位置がGPS衛星信号を捕捉できない捕捉不可位置であるか否かを判定する手段と、捕捉不可位置からの移動を検知する手段とから構成し、捕捉不可位置からの移動が検知された時、現在設定されている補正値を補正値保持手段に保持されている補正値に設定変更して再生周波数の調節を続行するように構成した。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】ユーザの現在位置の測位を行う測位装置において、ユーザの移動状態から有り得ない誤った測位結果が使用されることを防止する。
【解決手段】撮像装置1AのCPU10は、GPSユニット31における前回の測位結果と今回の測位結果に基づいて、ユーザの前回の測位位置からの移動距離Lを算出し、3軸加速度センサ16により検出されたユーザの移動状態に基づいて前回の測位位置からユーザが移動し得る距離の許容範囲を設定し、算出された移動距離Lが設定された許容範囲内である場合にGPSユニット31による測位結果を使用し、算出された移動距離Lが設定された許容範囲内ではない場合にGPSユニット31による測位結果を使用しないように制御する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】電力の消費を抑制しつつ、目的の変化に対応して位置精度を向上させる。
【解決手段】GPS受信部14及びCPU10は、所定の測位条件の成立毎に位置情報の測位(GPS測位)を行う。そして、地図データベース24は、一以上の景勝地の位置情報を複数種類のカテゴリーの何れかに対応付けて記憶する。そして、CPU10は、地図データベース24に記憶された景勝地から何れかを設定する。そして、CPU10は、設定された景勝地の属するカテゴリーに対応する大きさの領域を景勝地に対応付けて設定する。そして、CPU10は、GPS測位により測位した位置情報が設定された領域に属しているか否かを判定する。そして、CPU10は、この判定結果に基づいてGPS測位の測位条件を変更する。
(もっと読む)
121 - 140 / 523
[ Back to top ]