
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
141 - 160 / 523
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
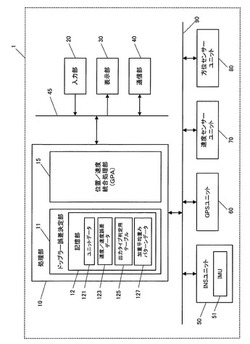
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
電磁信号源の位置特定
第1の複数のロケーションにおいてスキャニングを行うことにより、信号源位置データを生成するステップであって、信号源位置データは、前記信号源の少なくとも1つの位置の推定を表すステップと、信号検出システムを用いて第2の複数のロケーションにおいてスキャニングを行うことにより、信号検出データを生成するステップであって、信号検出データは、第2の複数のロケーションにおいて信号源から受信した信号に関連するステップと、信号検出データに基づいて信号源位置データを処理することによって、信号源位置データにおける推定誤差を修正するステップと、処理された信号源位置データを出力するステップとを含む、複数の電磁信号源のロケーションを推定する方法が提供される。 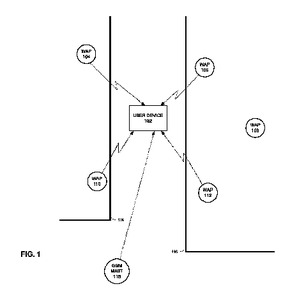 (もっと読む)
(もっと読む)
位置算出方法及び位置算出システム

【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
携帯ナビゲーションシステム
【課題】GPS電波が届きにくい場所でも利用でき、位置検出精度が高い携帯ナビゲーションシステムを提供する。
【解決手段】予め定められた位置に、互いに周波数が異なる交流磁界を発生する少なくとも3個の磁界発生源4a〜4cが配置されている。携帯端末2に搭載されている3軸磁気センサ3aを用いて、交流磁界を検出する。そして、交流磁界を周波数毎に分解し、周波数毎の交流磁界の強さを算出する。この値から、携帯端末2から磁場発生源までの距離を算出し、携帯端末2の位置を特定する。これにより、GPS電波が届きにくい場所でも、ユーザ6の進行開始位置を精確に特定することが可能になる。また、ユーザ6が移動した場合には、自律航法によってユーザ6の現在位置を特定する。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】追加のセンサを用いることなく正確な推定航法を行うことができる車両用推定航法装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から当該車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、前記車両に装着されたタイヤ回転情報検出手段から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを算出する第2パラメータ算出手段とを備えている。
(もっと読む)
ヘディングを決定するためのシステムおよび方法
【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 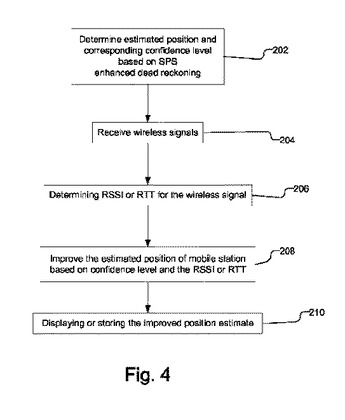 (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 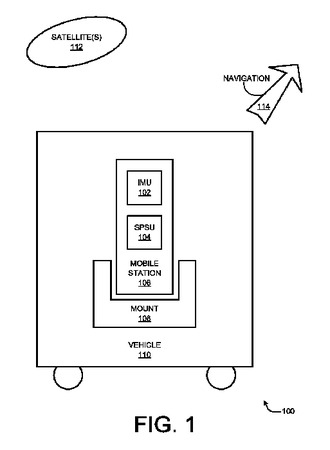 (もっと読む)
(もっと読む)
測位装置、及びこれを用いたセンサ情報の統合解析による見守りシステム
【課題】無線ビーコン装置からのビーコン信号に基づき、人・動物・物等の位置を、高い測位精度及び外部ノイズや信号欠落への頑健性を持ちつつ推定することができる測位装置、及びこれを用いた見守りシステムを提供する。
【解決手段】確率的遷移による遷移後のパーティクルpi’{座標値i’,重みi}、及びそのビーコンパタンBP(pi’)を計算し、得られたビーコンパタンBP(pi’)と実際の受信ビーコンパタンBP(Receiver)とを用いた尤度計算による遷移後のパーティクルpi’{座標値i’,重みi}のパーティクルフィルタリングを行い、前記尤度を用いた遷移後のパーティクルpi’{座標値i’,重みi}の重みiの更新による新しいパーティクルpi’’{座標値i’,重みi’}を計算し、これら各処理のループを繰り返す。
(もっと読む)
携帯電子機器
【課題】携帯電子機器において、ユーザの注意を喚起する。
【解決手段】携帯電子機器1は、自身の現在位置の情報である現在位置データを取得する位置取得部17,18と、安全な場所と安全でない場所とを判別可能な地図データ31を記憶する記憶部20と、地図データ31に基づいて、現在位置データが示す現在位置が安全な場所内であるか否かを判定する安全性判定部42〜44と、現在位置が安全な場所内でないと判定された場合に報知を行う報知部13とを有する。
(もっと読む)
外部ナビゲーションシステムによる,坑井測量用ジャイロスコープ計器及び慣性計器の方位初期化及び較正
【課題】坑井測量用のジャイロスコープ計器及び/又は慣性計器の方位初期化のためのシステム及び方法を提供すること。
【解決手段】このシステムは,ジャイロスコープ計器及び/又は慣性計器を剛性に接続できる剛基準構造物と,時間に応じた方位測定値を提供する外部ナビゲーションシステムであって,上記剛基準構造物は外部ナビゲーションシステムとジャイロスコープ計器及び/又は慣性計器との間に剛性な方向付けを提供するシステムと,時間に応じた方位測定値とジャイロスコープ計器及び/又は慣性計器の時間に応じた方向とを同期させることができるプロセッサと,を備える。
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
GPSレシーバ及びナビゲーションシステム
【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
位置測定装置
【課題】ユーザが地下鉄などで移動していることを判断することができる位置測定装置を提供することを目的とする。
【解決手段】本発明に係る位置測定方法は、衛星測位システムの測位用電波が不達で現在位置の測位が不能であるとき、且つ通信基地局間の移動の際に前記通信基地局との間で送受信される通信電波に途切れが生じたとき、現在位置の測位を停止させる。GPSは測位可能か否かを判断する。測位可能である場合、GPSは測位する。測位不可の場合、無線部はユーザの移動中に通信電波が途切れたか否かを判断する。通信電波の途切れがあった場合、CPUはGPSに対して測位を中止させる。
(もっと読む)
携帯情報端末及び制御方法
【課題】消費電力の低減を実現しつつ、使用者が使用を開始した際に新しい測位結果が得られるまでの時間を短縮すること。
【解決手段】携帯情報端末であって、第一測位間隔と、第一測位間隔よりも長い時間間隔を表す第二測位間隔と、を記憶する測位間隔記憶部と、GPSによる測位を行うGPS測位部と、自装置が使用状態であるか非使用状態であるか検出する使用状態検出部と、自装置が所持状態であるか非所持状態であるか検出する所持状態検出部と、自装置が使用状態であると検出された場合、及び自装置が非使用状態であり且つ所持状態であると検出された場合には、測位間隔記憶部から第一測位間隔を読み出し、第一測位間隔で測位を行うようにGPS測位部を制御し、自装置が非使用状態であり且つ非所持状態であると検出された場合には、測位間隔記憶部から第二測位間隔を読み出し、第二測位間隔で測位を行うようにGPS測位部を制御する制御部と、を備える。
(もっと読む)
141 - 160 / 523
[ Back to top ]