
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
161 - 180 / 523
携帯情報端末及び制御方法
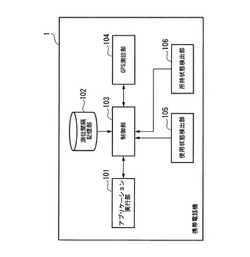
【課題】消費電力の低減を実現しつつ、使用者が使用を開始した際に新しい測位結果が得られるまでの時間を短縮すること。
【解決手段】携帯情報端末であって、第一測位間隔と、第一測位間隔よりも長い時間間隔を表す第二測位間隔と、を記憶する測位間隔記憶部と、GPSによる測位を行うGPS測位部と、自装置が使用状態であるか非使用状態であるか検出する使用状態検出部と、自装置が所持状態であるか非所持状態であるか検出する所持状態検出部と、自装置が使用状態であると検出された場合、及び自装置が非使用状態であり且つ所持状態であると検出された場合には、測位間隔記憶部から第一測位間隔を読み出し、第一測位間隔で測位を行うようにGPS測位部を制御し、自装置が非使用状態であり且つ非所持状態であると検出された場合には、測位間隔記憶部から第二測位間隔を読み出し、第二測位間隔で測位を行うようにGPS測位部を制御する制御部と、を備える。
(もっと読む)
ハンドヘルド測地デバイスによるグラフィクス支援遠隔位置測定

【課題】付加的な設置機器を使用せずに、位置を計測することが可能である測地デバイスを提供すること。
【解決手段】関心のある地点の位置を決定する装置であって、複数の衛星からの位置データを受信する少なくとも1つのアンテナと、該少なくとも1つのアンテナに結合される少なくとも1つの受信機と、画像データを獲得する画像化回路であって、該画像化回路は、光学センサと光軸とを含む、画像化回路と、配向データを獲得する配向回路と、該画像データおよび該配向データの表現を表示して、該装置を位置決定する際に使用者を支援するディスプレイと、該位置データ、該画像データおよび該配向データに少なくとも基づいて、該関心のある地点の該位置を決定する位置決定回路とを含む、装置。
(もっと読む)
自己位置取得装置、及び自己位置取得プログラム
【課題】省電力を図りつつ自己位置の測位・更新を行うことを可能にする。
【解決手段】GPS信号処理部により位置情報が取得できたか否かを判断する(ステップS9)。ステップS10での比較結果に基づき、今回取得した位置情報と直近の位置情報との差が所定の距離以上あるか否かを判断する(ステップS11)。差が所定以上ある場合には、GPS信号処理部の操作開始間隔を短くなるよう設定する(ステップS12)。今回取得した位置情報と直近の位置情報との差が所定の距離以上ではない場合は、GPS信号処理部の操作開始間隔をそのままで維持する(ステップS14)。ステップS9の判断がNOであって、GPS信号処理部により位置情報が取得できなかった場合には、GPS信号処理部を頻繁に動作させても無意味であることから、GPS信号処理部の動作開始間隔を長くするよう設定する(ステップS15)。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
測位方法および装置
【課題】本発明は測位装置に関し、マルチパス多発地帯でも受信手段の出力の異常判定を正確に行い、測位装置の位置精度の低下を防ぐ方法および装置を提供する。
【解決手段】上記課題は、擬似距離から算出された受信位置と、ドップラ周波数から算出された受信速度及び受信方位を分けてそれぞれの有効性判定を行うことにより、受信状況が直達波,直達波と反射波の合成波,反射波であるかを判定し、直達波を受信している時には受信位置を測位位置とし、直達波と反射波の合成波を受信したときでも、受信速度及び受信方位を有効と判定できる場合には、直前の受信位置を基に受信速度及び受信方位から測位装置の位置を補正して測位位置を求めることにより解決される。
(もっと読む)
密接に統合されたNAV−COMの能力で既存のGNSSユーザ装置をアップグレードする実用的な方法
統合されたNav−Comの能力を、任意の全地球航法衛星システム(GNSS)のユーザ機器、例えばGPS受信機に加える方法は、既存のユーザ機器のハードウェアを修正する必要がない。この概念を防衛高度GPS受信機(DAGR)に適用して、低地球軌道(LEO)衛星、例えばイリジウムと、GPS又は他のGNSSシステムとを組み合わせて、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性をかなり改善して、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張を利用できるようにする。既存のDAGRと差込み式のiGPS拡張モジュールとの間における、時間の同期化の安定性を、要求されるほぼ20psレベルにするために、専用の広帯域の基準信号をiGPSモジュールによって生成して、既存のアンテナポートを介してDAGRに接続して、DAGRのハードウェアの修正を不要にする。 (もっと読む)
測位装置及びプログラム
【課題】 使用者が意識的に装置本体の姿勢を修正しなくとも、GPS衛星からの測位用電波を良好に受信できるようにする。
【解決手段】 測位手段と、を有する測位装置として用いられるコンピュータに、
測位装置本体が移動していることを検出すると、3軸加速度センサにより検出された3軸方向の加速度に基づいて重力方向の加速度を検知するとともに、当該重力方向とは逆方向を天面方向として検出する。そしてGPS衛星からの測位用電波を受信する複数のアンテナから、この検出された天面方向と最も近い方向を向いているアンテナを選択し、この選択されたアンテナにて受信された測位用電波に基づいて現在位置を測位する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
【課題】無線装置が、遠距離位置追跡を可能にするためのジオロケーションおよび局所的位置追跡を可能にするための局所的位置技術を利用することにより、目標物に関する位置データを提供する。
【解決手段】ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
表示装置を備えるシステム、端末及び表示装置の検索方法
【課題】端末との距離及び画面の向きの関係に基づいて、利用者が視聴している表示装置を検索する方法を提供する。
【解決手段】コンテンツを表示する表示画面を備える表示装置と、前記表示装置を管理する検索装置と、を備えるシステムにおいて、前記検索装置は、前記表示装置の位置、前記表示画面の法線ベクトル、前記表示装置へアクセスするための情報を含む表示装置情報を管理し、端末の位置及び当該端末の向きを示す方向ベクトルを含む位置情報を前記端末から受信した後に、前記表示装置情報を参照して、前記位置情報を送信した端末と前記表示装置情報によって示される表示装置との距離、及び、前記方向ベクトルと前記法線ベクトルとの角度を計算し、前記計算された距離及び角度に基づいて尤度を計算する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
軌道ベースのロケーション決定
ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 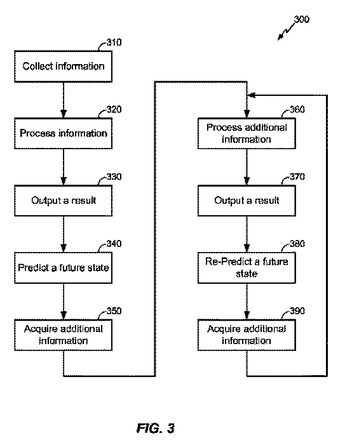 (もっと読む)
(もっと読む)
161 - 180 / 523
[ Back to top ]