
Fターム[5J062FF05]の内容
Fターム[5J062FF05]に分類される特許
21 - 40 / 122
全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザ
【課題】全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザを提供する。
【解決手段】少なくとも1つの割り当てられたGNSS周波数帯内の信号強度データを決定するための装置が提供される。装置は、GNSSアンテナを含む。GNSSアンテナは、割り当てられたGNSS周波数帯内の信号を受信する。装置は、受信回路網をさらに含む。受信回路網は、受信された信号を復調するためのものである。装置は、プロセッサ、およびプロセッサにより実行可能な命令を記憶するためのメモリをさらに含む。命令は、復調された信号に基づいてGNSSに割り当てられた周波数帯内の受信された信号に対する信号強度データを生成するための命令、および復調された信号に基づいて関心のある地点に対する位置を決定するための命令を含む。
(もっと読む)
サンプリング機能付きセンサデバイス及びそれを用いたセンサデータ処理システム

【課題】センサデバイス間での測定数比を任意に設定・保持し、その測定数比を維持したまま自律的に測定可能にすること。
【解決手段】複数のセンサデバイス間で測定数比を維持して測定するためのカウント命令をカウントするカウンタ511と、測定数比を所望の測定数比に設定し、複数のセンサデバイスが各自対応するように測定数比の設定値を保持する測定数比保持部512と、カウンタ511のカウンタ値と、測定数比保持部512により保持された測定数比の設定値とを入力し、カウンタ値と設定値との一致後にサンプリングタイミング信号を生成するサンプリングタイミング生成部513と、検知部514で検知された検知信号をサンプリングタイミング生成部513によるサンプリングタイミング信号でサンプリングするサンプリング部515とで構成されている。
(もっと読む)
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
(もっと読む)
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
測位装置及び方法
【課題】WLAN測位により特定された位置が信頼できるかどうかを判定すること。
【解決手段】位置を測定する測位装置は、アクセスポイントからの電波に基づいて、測位を行うWLAN測位演算部と、測位衛星からの電波に基づいて、測位を行う衛星測位部と、衛星測位部による測位の際に取得されるべき位置情報又は測位位置に基づいて、該位置情報又は測位位置から所定の範囲に、WLAN測位演算部による測位結果が存在するかどうかを判定する測定結果判定部と、判定された結果に基づいて、測位結果を採用するかどうかを判定する測位結果採用判定部とを有する。
(もっと読む)
移動無線測位装置
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
位置決め装置の異常変位を判定するためのシステム、方法、および装置
【課題】 空間内の位置決め装置が変位されたかどうかを判定するための技術的解決法を提供する。
【解決手段】 本発明の実施例では、空間内の位置決め装置が変位されたかどうかを判定するためのシステム、方法、および装置が提供される。具体的には、測距信号を発する機能を有するタグと、当該タグからの測距信号に基づいて、当該タグが位置する位置点の位置決め装置に対する相対座標を取得するように構成された位置決め装置と、空間内の位置点の相対座標、位置決め装置の較正パラメータ、および信頼済み絶対座標に基づいて、位置決め装置が変位されたかどうかを判断するように構成されたサーバとを備えることのできるシステムが提供される。本発明の実施例により、位置決め装置が変位されたかどうかの判定を正確、包括的、かつリアルタイムに行うことができる。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
制約された領域における、擬似衛星による位置決定用の自律システム及び適用方法
複数人配置確認支援システム
【課題】複数人の配置を正確に把握する。
【解決手段】フォーメーション確認支援システム1は、携帯端末2、基地局3及び管理サーバ4を備える。携帯端末2は、測定対象領域にいる各人に装着され、当該携帯端末2に固有の端末IDを含む電波を発信する発信部を有する端末である。基地局3は、測定対象領域の周囲に設置され、1以上の基地局3が携帯端末2と通信可能な範囲が測定対象領域全体をカバーするように基地局3の台数及び設置位置が調整される。そして、携帯端末2から電波を受信し、その受信した電波に基づいて当該携帯端末2の方向及び距離を求め、求めた携帯端末2の方向及び距離と、基地局3自体の位置とから携帯端末2の位置を算出し、算出した携帯端末2の位置、端末ID及びその時の時刻を含む位置情報をサーバ4に送信する。管理サーバ4は、基地局3から各携帯端末2の位置情報を随時受信し、記憶するとともに、各携帯端末2の配置を表示する。
(もっと読む)
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
位置算出装置、方法及びプログラム
【課題】局所座標系ごとに算出された位置座標を精度よく1つの座標系に統合する。
【解決手段】複数の局所座標系を検出し、端末と複数の送信機それぞれとの間の距離に基づいて、局所座標系それぞれにおいて、複数の送信機の位置座標を算出する手段1920と、複数の局所座標系のうち、閾値以上の数の送信機を共有する2つ以上の局所座標系を、互いに統合可能な座標系として抽出する手段1931と、抽出された2つ以上の局所座標系それぞれにおいて、送信機間距離及び送信機間距離の信頼度を算出し、2つ以上の局所座標系それぞれにおいて算出された送信機間距離の信頼度によって重み付けを行なって重み付け補正後の送信機間距離を算出し、信頼度がある値よりも高い送信機の補正後の送信機間距離のみを用いて、2つ以上の局所座標系を統合した座標系における各送信機の位置座標を信頼度が高い順に算出する手段1932と、を具備する。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
位置推定システム、通信端末、および位置推定方法
【課題】 近距離に位置する検索対象の通信端末の位置を精度良く推定すること。
【解決手段】 位置推定システムの携帯端末Aでは、被検索端末の位置を示すGPS位置情報に誤差がある場合であっても、Bluetooth通信部4におけるBT通信により、距離演算部5において得られる端末間距離情報によって近距離に位置する両端末間の距離を把握することができ、被検索端末のGPS位置情報にこの端末間距離情報を加味することにより、緯度経度演算部6によって、検索端末から近距離に位置する被検索端末の位置を精度良く推定することができる。また、被検索端末の位置をディスプレイ9によって表示することにより、携帯端末Aのユーザに対して被検索端末の位置を精度良く報知することができる。
(もっと読む)
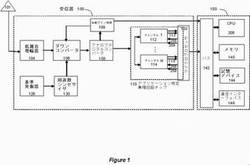
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 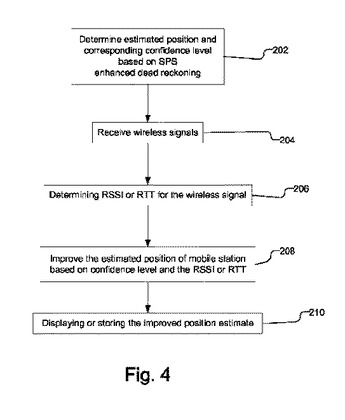 (もっと読む)
(もっと読む)
位置特定方法、測位システム及びプログラム
【課題】マルチパスによる計測誤差の影響を低減し、精度よく通信端末の位置を特定する。
【解決手段】位置を特定するための計測距離を、当該計測距離の信頼性が低い場合にほぼ零となる値を出力し、それ以外の場合に計測距離に応じた値を出力する評価関数を用いて評価する。これにより、計測距離に含まれる誤差が大きい場合には、当該計測距離を除外し、信頼性の高い計測距離のみに基づいて、通信端末の位置を特定することが可能となる。このため、マルチパスによって計測距離に誤差が含まれたとしても、精度よく通信端末の位置を特定することができる。
(もっと読む)
屋内コンテキスト情報を送信するための方法および装置
本明細書に開示した対象は、モバイル機器の位置に関する屋内コンテキスト情報を決定するためのシステムおよび方法に関する。屋内コンテキスト情報は、モバイル機器またはネットワーク要素によって、屋内環境内のモバイル機器の位置の推定を取得するために利用できる。 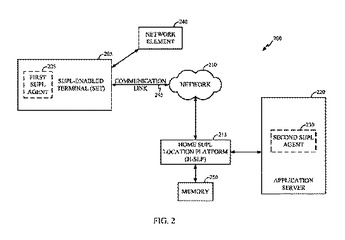 (もっと読む)
(もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
21 - 40 / 122
[ Back to top ]