
Fターム[5J062FF05]の内容
Fターム[5J062FF05]に分類される特許
81 - 100 / 122
車両測位システム、車庫システム、および車両測位方法
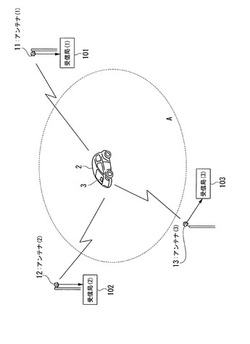
【課題】車両の位置を測位する際に、高い使用周波数(例えば、5.8GHz帯)で動作するETC車載器を利用できるともに、低い周波数(例えば、2MHz)により安定して車両の駐車位置を測位できる、車両測位システムを提供する。
【解決手段】3箇所に設置された受信局101、102、103により、ETC車載器3から発信される電波を受信して車両2の位置を測位する。ETC車載器3では、キャリア波(例えば、5800MHz)を変調し、測位に供する2つの周波数スペクトル(例えば、5799MHzと5801MHz)を含む信号を生成して無線により送信する。各受信局は、ETC車載器3から受信した電波の信号から2つの周波数スペクトルの差の周波数成分(例えば、2MHz)の位相差を測定し、この位相差の信号を基に、ETC車載器3を搭載した車両2の位置を測位する。
(もっと読む)
歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法

【課題】歩行者の位置を精度良く特定するための歩行者の歩幅を算出する歩幅算出装置、歩行距離特定装置、位置特定装置、コンピュータプログラム及び歩幅算出方法を提供する。
【解決手段】相関パラメータ算出部172は、歩行者の歩幅と一歩毎の歩行速度との相関パラメータを算出する。2地点間の歩行距離をd、2地点間の歩行者の歩数をn、2地点間の一歩毎の歩幅の列をwi(i=1、2、…n)、2地点間の一歩毎の歩行速度の列をvi(i=1、2、…n)とすると、歩幅と歩行速度との相関関係は、d=Σwi=α・Σvi+n・βで表わすことができる。ここで、α、βは相関パラメータである。歩幅算出部173は、距離センサ132等で歩数及び一歩毎の歩行速度を取得し、取得した歩数及び歩行速度と相関パラメータα、βとにより一歩毎の歩幅を算出する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性があるか否かを判定する。可能性の有無は、例えば、歩行の開始、歩行の停止、歩行速度の変動等により判定することができる。位置特定部174は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性がある場合、歩行挙動と交差点に設置された信号機の信号切替タイミング又は踏切に設置された警報タイミングとが合致するか否かを判定し、合致する場合には、歩行者の位置を横断歩道付近又は踏切付近に特定する。例えば、横断歩道を有する交差点に設置された信号機の青信号点灯開始時点に、歩行挙動が歩行開始であるとき、歩行者の位置を横断歩道付近に特定する。
(もっと読む)
位置検出装置
【課題】移動体の絶対位置を高精度に検出する位置検出装置を提供することを課題とする。
【解決手段】移動体の絶対位置を検出する位置検出装置1であって、移動体の絶対位置を取得する絶対位置取得手段10と、移動体の絶対位置の確率分布を取得する絶対位置確率分布取得手段10と、移動体間の相対位置関係を取得する相対位置関係取得手段11と、3体以上の移動体の絶対位置とその絶対位置の確率分布及びその3体以上の移動体間の相対位置関係に基づいて当該3体以上の移動体の絶対位置を特定する絶対位置特定手段21とを備えることを特徴とする。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】位置推定部171は、前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。
(もっと読む)
埋設位置特定装置、埋設位置特定方法、及び、プログラム
【課題】地中に埋設された埋設物の位置を、地上で精度良く特定すること。
【解決手段】埋設物の埋設推定位置の基準点を記憶し、埋設物と交差する地表線上の複数の地点であって、基準点を境に左右に離れた複数の地点における、埋設物からの距離の入力を受け付ける。そして、埋設物からの距離を基に、基準点を境にした地表線上の2点であって、埋設物からの距離が等しい2点の位置を算出し、当該2点の中間地点の位置を算出する。さらに、複数の中間地点の位置の平均を求めて、平均の位置を埋設位置と特定する。
(もっと読む)
埋設物位置特定装置
【課題】 従来の地雷回収には、広域な地雷原に埋設された地雷を回収するのに時間を要するため、短時間で効率的に位置を特定できる装置が求められていた。
【解決手段】 電波を受信したら埋設物識別子を送信する無線部搭載埋設物と、自位置情報と電波送信時刻と埋設物識別子と埋設物識別子受信時刻を送信する主局装置と、主局装置と時刻同期であり自識別子と自位置情報と埋設物識別子と埋設物識別子受信時刻を送信する複数の従局装置と、複数の従局装置より受信した従局装置識別子と従局装置位置情報と埋設物識別子と従局装置の埋設物識別子受信時刻、及び主局装置より受信した主局装置位置情報と埋設物識別子と主局装置の埋設物識別子受信時刻と主局装置の電波発信時刻とに基づき、無線部搭載埋設物の位置を特定する位置特定装置とを備える。
(もっと読む)
衛星測位システムにおける独立した高度測定
本発明は、衛星測位システムにおける独立な高度測定の装置及び方法に関する。衛星測位装置を有する衛星測位システムにおける位置決定装置において、衛星測位装置は、ロケーションプロセッサ304に結合される衛星データ信号受信機302、ロケーションプロセッサ304に結合され、受信された衛星データ信号とは独立に衛星測位装置の高度を決定可能である高度決定装置306とを有する。高度決定装置306は、衛星データ信号受信機302からの測位データを補うために高度データを発生可能である。 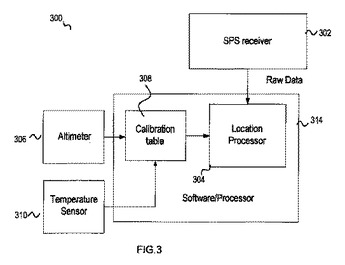 (もっと読む)
(もっと読む)
列車の自車位置検出装置、車体傾斜制御システム、操舵システム、アクティブ制振システム及びセミアクティブ制振システム
【課題】列車の自車位置を高精度に検出する。
【解決手段】速度発電機3と、GPS受信機2と、速度発電機3及びGPS受信機2の出力に基づいて基準位置からの走行距離と速度発電機3の出力を補正する誤差パラメータδkとを推定するカルマンフィルタ21と、速度発電機3及びカルマンフィルタ21の出力に基づいて基準位置からの走行距離を算出して列車位置を決定する自車位置決定部22とを備え、自車位置決定部22は、GPS受信機2の出力の更新時には、カルマンフィルタ21で推定された走行距離により列車位置を決定する一方、GPS受信機2の出力の更新時以外には、速度発電機3の出力の更新時に、カルマンフィルタ21で推定された走行距離のうち最新のものと、カルマンフィルタ21で推定された誤差パラメータδ{^}kのうち最新のものを用いて補正された速度発電機3の出力とに基づいて走行距離を積算して列車位置を決定する。
(もっと読む)
位置推定システム及び無線通信端末
【課題】近距離通信機能を用いた簡単なシステム構成によって、無線通信端末の位置を推定する。
【解決手段】複数の基準局110が設置されている所定エリア内を移動する移動無線機100は近距離無線通信機能を有しており、基準局の近隣を通過する際にその基準局の位置を特定するための位置特定情報を基準局から受信する。移動無線機は、受信した基準局の位置特定情報を受信時刻と関連付けて、交差履歴データとして記憶する。一方、別の移動無線機とすれ違う際には、相手の移動無線機との間で交差履歴データを交換する。そして、自機が通過した直近の基準局の位置、自機が直近の基準局を通過してから相手の移動無線機とすれ違うまでの時間、相手の移動無線機が通過した直近の基準局の位置、相手の移動無線機が直近の基準局を通過してから自機とすれ違うまでの時間に基づいて、2つの移動無線機がすれ違った位置を推定する。
(もっと読む)
移動体周辺情報取得装置
【課題】移動体の位置を随時適当に補正しながら周辺情報を搭乗者等のユーザに提供する移動体周辺情報取得装置を得る。
【解決手段】移動体1に搭載されている速度発電機2の出力電圧を入力した計算部3が移動体1の位置を示すデータを求め、このデータを無線部4が小電力無線通信によって送信し、通信部4からの移動体1の位置を示すデータを端末5の情報通信部10が受信して、制御部12の速度発電機情報補正部21がGPSデータを用いて移動体1の位置を示すデータを補正し、補正した位置の周辺情報を位置関連情報検索表示部23がデータベース14を検索して表示部13に表示する。
(もっと読む)
逆方向レイ追跡法を用いて送信機を位置特定する方法
建造物内の送信機を位置特定する方法によると、送信機は建造物の壁、天井及び床と複数回反射するレイを放射する。K個の受信機の各々は送信機からのレイを受信し、受信機は各レイのAOA(到来角)、TOA(到着時間)及びパワーを推定する。受信機の少なくとも1つが建造物の既知の設計図及び壁の材料特性を用いて、逆方向レイ追跡アルゴリズムを適用することによって高い精度で送信機を位置特定する。 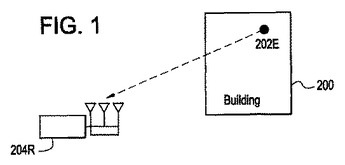 (もっと読む)
(もっと読む)
測位システム、測位装置、測位方法及び測位装置の制御プログラム。
【課題】基地局の大幅なシステム変更を必要とすることなく、3つ以上の基地局からの信号を受信できない場合であっても測位することができる基地局間非同期方式の通信網における測位システム等を提供すること。
【解決手段】通信基地局20A等は、基地局位置情報152を格納する基地局位置情報格納手段と、送信時刻における送信時刻と衛星時刻との時差を示す時差情報160を生成する時差情報生成手段等を有し、端末装置50は、通信基地局20A等から、基地局位置情報152及び時差情報160を取得する基地局情報取得手段と、端末装置50の上空に位置する測位衛星12a等である上空衛星の数を判断する上空衛星数判断手段と、上空衛星の数に基づいて、衛星信号測位手段、通信用信号電波測位手段、又は、複合測位手段のいずれかを選択する測位手段選択手段等を有する。
(もっと読む)
携帯端末、安否状態通知方法および安否状態通知プログラム
【課題】大規模災害が発生した場合に、何も異常がなく無事であることを示す安否状態を通知することを課題とする。
【解決手段】携帯端末は、インターネットなどの外部ネットワークを介して、基地局や他の端末と相互に無線通信可能に接続されており、インターネットに接続して電子メールを送受信する携帯端末は、インターネットから電子メールを受信した場合に、受信された電子メールに緊急性を示す識別情報が含まれていると、当該電子メールを緊急性のある電子メールと判定し、受信された電子メールが緊急性のある電子メールと判定された場合に、携帯端末所有者の移動状態を取得し、取得された移動状態から携帯端末所有者が被害を受けたかまたは無事であるかを示す安否状態を検出し、検出された安否状態を予め定めた緊急連絡先に通知する。
(もっと読む)
絶対位置決めモード及び相対位置決めモードを含む位置決め装置、方法、並びにプログラム
本発明は、絶対位置決めシステム及び相対位置決めシステムを使用して位置を判定するように構成される位置決め装置(PD)に関する。位置決め装置は、絶対位置決めシステム及び場合によっては相対位置決めシステムを使用して位置を判定する第1のモード、並びに相対位置決めシステム及び場合によっては絶対位置決めシステムを使用して位置を判定する第2のモードで動作するように構成される。絶対位置決めシステムは、第2のモードにおいてよりも第1のモードにおいてより重点を置かれ、位置決め装置は、第1のモードから第2のモードに切り替えるように構成される。位置決め装置(PD)はデジタル地図データベース(DMD、3DMD)へのアクセスが可能であり、第1のモードから第2のモードへの切り替えは、地図データベース(DMD、3DMD)に格納された情報と組み合わせて、少なくとも判定された位置に基づいて決定される。 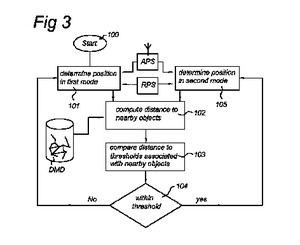 (もっと読む)
(もっと読む)
列車位置検知装置
【課題】GPS受信機を複数化したうえで測位結果の監視判定に工夫を凝らすことにより装置異常にも非装置異常にも適切に対処する列車位置検知装置を実現する。
【解決手段】路面電車20に搭載されて速度計22から得た速度情報をGPS受信機33,73の測位結果(X1,Y1),(X2,Y2)に反映させることで車両位置(X5,Y5)を検知する車上処理装置34が、GPS受信機33,73の一方からしか測位結果が得られないときには異常予見状態であると判定し、さらに、路線マップデータ及び付加データに照らして測位の不能な所に居る場合には異常予見状態が発現したときに故障などの装置異常が発生したと判定するが、測位の可能な所に居る場合には異常予見状態が所定の設定時間以上に亘って継続したときに装置異常が発生したと判定する。
(もっと読む)
センサのバイアス誤差推定装置
【課題】バイアス誤差を、センサを中心とした直交座標系においてオイラー角で定義する場合、バイアス誤差推定方式で定式化した際に観測行列の階数が足りず、正則とならないため、3次元の位置の観測値だけではバイアス誤差を推定することができない。
【解決手段】センサで観測した3次元の観測値からX、Y、Z軸の回転角のうち、1軸バイアス誤差補正器5により、1軸の回転角について取り得る範囲で複数パターン想定し、あらかじめ1軸の回転角のみ補正した観測値を求め、この補正後の観測値を用いて、2軸バイアス誤差補正器7により残りの2軸の回転角を推定する。2軸バイアス誤差補正器群8で推定した2軸の回転角と、1軸バイアス誤差補正器5で補正した1軸の回転角を1つの組合せとして、その中から最適なX、Y、Z軸の回転角を選択する推定値評価器9を設けて、バイアス誤差を推定するようにした。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
ワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステム
ワイヤレス・デバイスの位置を検出する様々な技法では、移動局(MS)が、ワイヤレス・ネットワーク内部において地理的に分散する基地局が送信する信号の測定を行うことを伴う。一部のキー・サイト情報が、送信機の位置、送信信号電力、信号伝搬、および送信信号タイミングのように、これらの送信機に関することが分かっている場合、MSによるこれら送信信号の測定を用いて、MSの位置を判定することができる。送信機を検出し、キー送信機情報を識別し、基地局送信信号を利用して位置検出を実行する自動方法を提案する。加えて、この方法は、複数のワイヤレス・ネットワークの一部であるセル・サイト送信信号を使い易くする。 (もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
81 - 100 / 122
[ Back to top ]