
Fターム[5J062HH00]の内容
無線による位置決定 (18,435) | 表示 (888)
Fターム[5J062HH00]の下位に属するFターム
Fターム[5J062HH00]に分類される特許
41 - 60 / 121
送受信システム
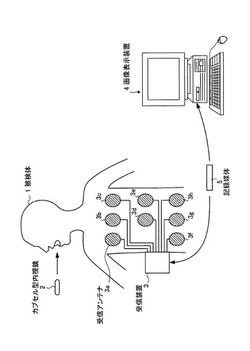
【課題】データを受信した際の受信電界強度を受信アンテナ毎に安定して検出することができること。
【解決手段】本発明にかかる送受信システムは、被検体1の内部に導入される送信装置であるカプセル型内視鏡2と、この被検体1内部のカプセル型内視鏡2によって無線送信された変調信号を受信する受信装置3とを備える。カプセル型内視鏡2は、被検体1の体内画像データを取得し、狭帯域信号成分を含む強度検出区間と被検体1の体内画像データを含むデータ区間とを有する変調信号を無線送信する。受信装置3は、受信アンテナ3a〜3hを介してカプセル型内視鏡2からの変調信号を受信し、この受信した変調信号から分岐した一方の変調信号の強度検出区間に含まれる狭帯域信号の受信電界強度を受信アンテナ毎に検出し、他方の変調信号のデータ区間に含まれる体内画像データを信号処理する。
(もっと読む)
自車位置検出装置

【課題】 座標誤差により方位が違っていると使用者に感じさせること(方位のアンマッチ感)を軽減することができる自車位置検出装置を提供すること。
【解決手段】 自車の方向を自車からの通信による座標位置から演算し、表示部18で自車方向を表示し使用者を自車へ誘導する携帯機1において、表示部18は、自車の方向を示す指向性表現と自車位置までの距離感の表現を一体化したA方向〜H方向の第1表示401〜第7表示407を備えた。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理の速度補正処理で用いる測定誤差を適切に設定すること。
【解決手段】予め規定された3つの捕捉モードのうち、選択的に決定された捕捉モードでGPS衛星信号を捕捉する捕捉処理が実行されて、携帯型電話機1の位置及び速度を成分とする状態ベクトルの予測処理が実行される。また、各捕捉衛星毎に当該捕捉衛星からの受信信号周波数の実測値と予測値との差を観測値として状態ベクトルの速度成分を補正する速度補正処理と、当該捕捉衛星と測位装置間の距離を示す距離相当値の実測値と予測値との差を観測値として状態ベクトルの位置成分を補正する位置補正処理とが実行される。その速度補正処理では、捕捉衛星信号の信号強度に基づいて当該捕捉衛星についての当該速度補正処理で用いる測定誤差の初期値を設定する設定方法が、捕捉モードに応じて切り替えて設定される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位処理の切り替えによる測位精度の低下を防止すること。
【解決手段】複数のGPS衛星から発信されているGPS衛星信号を受信して最小二乗法
を用いたLS測位処理を行って現在位置が測位される。そして、LS測位処理の結果が、
測位処理を移行する条件として予め定められた測位移行条件を満たすか否かが判定され、
満たすと判定された場合に、LS測位処理を停止させ、複数のGPS衛星から発信されて
いるGPS衛星信号を受信してカルマンフィルタを用いたKF測位処理をが行われて、現
在位置が測位される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位位置の位置飛びを考慮して、適切な位置出力を行うこと。
【解決手段】GPS衛星から発信されているGPS衛星信号に基づいて携帯型電話機1の
現在位置及び移動速度ベクトルが間欠的に計測される。また、今回測位位置を位置飛びと
判定しない認容位置領域が計測結果に基づいて設定され、認容位置領域内に今回測位位置
が位置するか否かによって位置飛びが判定される。そして、位置飛びと判定されなかった
場合に、従前の計測結果から算出した予想位置を用いて今回測位位置を補正する補正処理
が行われ、今回出力位置が決定されて出力される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて、当該G
PS衛星信号のコード位相が測定される。そして、捕捉したGPS衛星信号の信号強度に
基づいて、当該捕捉衛星についての状態ベクトル「X」の位置補正処理で用いる測定誤差
としての位置R値の初期値が設定され、当該初期値が設定された位置R値が、当該捕捉衛
星からのGPS衛星信号を捕捉処理した際の捕捉時諸量に基づいて変更される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
位置情報提供システムおよび屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】屋内送信機はプログラマブルに送信信号のフォーマットを変更可能であり、位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S632)と、そのデータから座標値を取得するステップ(S634)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
コード表示装置
【課題】 現在位置を示すコードを、移動中に手軽に表示することができるコード表示装置を提供する。
【解決手段】 コード表示装置であるレーダ探知機1は、レーダ監視のため、ソーラーパネル28aと充電電池とを備えていて、常時電力を供給できるように構成されている。そのため、このレーダ探知機1では、現在位置を常時特定することができ、しかも、その常時特定可能な現在位置情報を示すバーコードを液晶モニタ24に表示することが、いつでもすばやくできる。従って、このレーダ探知機1を用いれば、事故など必要なときにすばやく現在位置情報を含むバーコードを提示することができるので、事故など、現在位置を正確に警察等に伝えたいとき、カメラ付き携帯電話に備えられたカメラを利用してバーコードを読み込むことで、警察等に現在位置を正確に伝えることができる。
(もっと読む)
給電レールおよび位置管理システム
【課題】例えば、所定位置に検出手段を備えた給電レールをフロアーの天井に配置し、この検出手段により所定位置に対応した給電レール近傍の物理量を検出する。
【解決手段】管理サーバ21は、給電レール50に設けた複数個の赤外線センサ40の位置および担当エリアを把握しておく。赤外線センサ40は、エリアの温度を検出しているため、人がいる場合を検出するので、管理サーバ21は、人の位置を管理できる。しかも、この給電レール50は、PLCシステムの一部として用いられるため、信号の授受は電力線を流れる電流に重畳して行うことができ、赤外線センサ40の配線等を別途行うことなく、検出対象の位置管理が可能となる。
(もっと読む)
相対的な追跡のための方法およびシステム
【課題】全般的に改良され、しかも拡張現実システム関連において特定の有用性も有する追跡システムおよび方法を提供すること。
【解決手段】追跡方法であって、ワールド座標系で第1の移動体の位置および向きを確立することであって、該第1の移動体には、該ワールド座標系で追跡情報を生み出すように動作可能である第1の追跡システムが装備されている、ことと、該第1の移動体に取り付けられ、該第1の移動体に対する座標系で追跡情報を生み出す第2の追跡システムを使用して、第1の移動体に対する第2の移動体の位置を追跡することであって、該第2の移動体は、該第1の移動体の任意の構造的領域の外側にある、ことと、該ワールド座標系での該第1の移動体の追跡情報を、該第1の移動体に対する座標系での第2の移動体の追跡情報と組み合わせ、該ワールド座標系で第2の移動体の該位置および該向きを生成することとを包含する、方法。
(もっと読む)
鉄道航法システム
【課題】鉄道航法システムにおいて、高度情報データベース等を利用することなく取得した3次元情報を鉄道車両の運行管理に効果的に活用すること。
【解決手段】鉄道車両に搭載され、線路上を走行する鉄道車両のための鉄道航法システムであって、人工衛星からの電波を受信することにより現在位置の緯度、経度および高度を含む3次元位置情報を測位するGPS受信器21と、GPS受信器21が検出した高度情報に基づき、線路4上の一の地点と、線路4上の他の地点との間の勾配値を演算する演算部22と、演算部22が演算した勾配値を3次元位置情報に関連づけて表示する表示部14と、を備える。
(もっと読む)
位置特定システム
本発明は、特に患者1の体内で介入器具2を位置特定するのに使用されることができる位置特定システムに関する。前記位置特定システムは、電磁信号をプローブ経路20及び基準経路に沿ってそれぞれ伝搬する成分に分離する電磁波源10を有する。前記プローブ経路20は、位置特定されるべき点において前記信号を放射する信号出口22と、前記放射された信号を獲得する少なくとも1つの検出器23とを有する。相関器は、プローブ経路20及び基準経路30に沿ってそれぞれ伝搬した信号成分間の相関を決定するのに使用される。前記基準経路の長さを知ると、プローブ経路20における信号出口22と検出器23との間の未知の距離は、相関情報に基づいて推定されることができる。 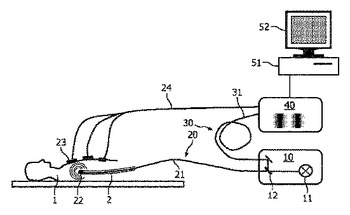 (もっと読む)
(もっと読む)
マリンホースのホースライン監視システム
【課題】マリンホースの重量の増加を抑えてGPS受信機を設置することができ、かつ設置したGPS受信機の損傷を防止するようにしたマリンホースのホースライン監視システムを提供する。
【解決手段】複数のGPS受信機11を、ホースラインの長手方向に所定間隔で設置する際に、ホースラインを形成する複数のマリンホース1のフロート層9の水上側位置で、ニップル部2b外周に埋設し、この埋設した複数のGPS受信機11が送信した位置データに基づいて、陸上の監視基地に設置した演算装置がホースラインHLの形状を算出し、その算出データをモニターに表示する。
(もっと読む)
GPS測位装置、電子機器、制御方法、プログラム及び記憶媒体
【課題】擬似衛星から発信される擬似衛星信号を受信して現在位置を測位する際に、現在位置の測位に要する時間の短縮を図ること。
【解決手段】GPS機能を有する携帯電話機1では、GPS衛星3から発信されるGPS衛星信号、及び擬似衛星5から発信される擬似衛星信号を基に現在位置が測位される。擬似衛星信号に基づく現在位置の測位では、捕捉した擬似衛星信号のPRNコードに対応する配置位置情報が記憶されているならば、この配置位置情報を基に現在位置が決定される。記憶されていないならば、捕捉した擬似衛星信号に含まれる配置位置情報が取得され、現在位置として決定されるとともに、この擬似衛星信号のPRNコードと対応付けて記憶される。
(もっと読む)
物体又は人物の位置探知システム
【課題】
【解決手段】
静止あるいは移動中の物体(3)または人物の位置を探知するシステムであって、少なくとも1つの高周波通信手段と位置探知装置(2)と、探知対象装置(1)の通信手段との通信を確立するための高周波通信手段とを含んでいる。位置探知装置(2)は、少なくとも1つの角度決定手段(10)と、探知対象装置(1)と位置探知装置(2)との間の距離(d)を決定するために位置探知装置(2)の通信手段によって受信される探知対象装置(1)の通信手段からの信号を処理する手段と、位置探知装置(2)の3つの異なる一時的地理的位置での少なくとも3組のペアの測定値から“方向”ベクトルと称されるベクトルを計算するための計算手段と、をさらに含んでおり、それぞれのペアの測定値は、位置探知装置(2)と探知対象装置(1)との間で計算された距離(d)と角度(θ)とを含んでおり、角度(θ)は、地理的および一時的な第1位置と第2位置との間、あるいは地理的および一時的な第2位置と第3位置との間で位置探知装置が移動した距離を表す直線と地磁北とによって定義され、第1の一時的地理的位置は位置探知装置の起動位置または座標の原点(0,0)である。
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 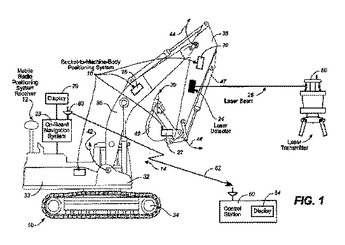 (もっと読む)
(もっと読む)
位置検知方法
【課題】 絶対位置検知装置による移動軌跡に相対位置検知装置による移動軌跡をフィッティングさせる際に、少ない種類のパラメータで相対位置検知装置の位置を高精度に決定し維持する位置検知方法を提供する。
【解決手段】 相対位置検知装置の出力値と絶対位置検知装置の出力値とを併用して位置を検知する位置検知方法において、絶対位置検知装置の移動軌跡に相対位置検知装置で求めた移動軌跡をフィッティングさせるための回転角および移動量を求め、相対的位置検知装置の最新位置を上記回転角および移動量で補正し、補正された位置から新たな移動軌跡の検知を開始し、絶対位置検知装置の利用可能な新たな位置情報が得られるまでは、相対位置検知装置の出力値を上記回転角および移動量で補正し続ける。絶対位置検知装置の高精度区間における移動軌跡を用いて、相対位置検知装置の位置を補正できる。
(もっと読む)
フリーアクセス床下空調状態計測装置
【課題】フリーアクセス床下の空調状態を容易に正確に計測できるフリーアクセス床下空調状態計測装置を提供する。
【解決手段】空調状態計測部と無線送信部とを備えた空調状態計測ユニットと、無線受信部と電波強度測定部とを備えた3台以上の無線受信ユニットと、前記各無線受信ユニットで受信した計測データを取得するとともに各無線受信ユニットで測定した電波強度をそれぞれ取得する制御ユニットとから構成され、床上に設置した制御ユニットに接続された3台以上の無線受信ユニットを予めフリーアクセス床下に設置しておくとともに、前記制御ユニットに、前記各無線受信ユニットでそれぞれ測定した電波強度に基づいて計測データを送信した空調状態計測ユニットの設置位置を検出する送信位置検出部と、検出した空調状態計測ユニットの設置位置に対応させて計測データを表示器に表示する計測データ表示部とを設けたフリーアクセス床下空調状態計測装置である。
(もっと読む)
認知症患者保護システム
【課題】介護者や保護者、付添人が認知症患者の正確な位置を確認することができる認知症患者保護システムを提供する。
【解決手段】認知症患者保護システム10は、認知症患者の身体に貼付されて電波を発信するエンドデバイス11と、所定の区域に分散配置されてエンドデバイス11から発信された電波を受信する複数のアクセスポイント12と、アクセスポイント12がエンドデバイス11から受信した電波の受信電力とエンドデバイス11のID番号とをアクセスポイント12から受信するPHS携帯端末13とから形成されている。PHS携帯端末13は、受信電力に基づいてエンドデバイス11と各アクセスポイント12との距離を測定し、測定した距離からエンドデバイス11の位置を算出することで、認知症患者の位置を特定する。
(もっと読む)
41 - 60 / 121
[ Back to top ]