
Fターム[5J062HH01]の内容
Fターム[5J062HH01]に分類される特許
1 - 20 / 31
AISメッセージを検出するための方法
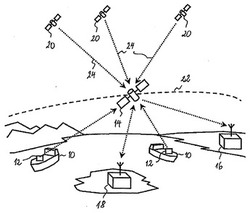
【課題】AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善すること
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
(もっと読む)
位置情報取得装置、位置情報取得方法、及びプログラム

【課題】動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置等を提供する。
【解決手段】位置情報取得装置100は、所定の時間間隔で現在時刻と現在時刻における現在位置情報とを取得する移動履歴取得部181と、所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部182と、処理実行時刻より前の時刻に取得された第1の現在位置情報と、処理実行時刻より後の時刻に取得された第2の現在位置情報と、第1の現在位置情報に対応する第1の現在時刻と、第2の現在位置情報に対応する第2の現在時刻と、処理実行時刻と、に基づいて、処理実行時刻における処理実行位置を算出する処理実行位置算出部185と、処理実行位置と処理実行時刻とを関連付けて記憶する動作履歴取得部184と、を備える。
(もっと読む)
走行軌跡記憶装置
【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した新たな位置算出手法の提案。
【解決手段】衛星測位用ユニット3の第1の計測結果と慣性測位用ユニット5の第2の計測結果とを用いて、カップリング処理部7がカップリング処理を行う。そして、信号捕捉支援情報演算部9が、カップリング処理の結果を用いて、カップリング処理において不使用の衛星信号を捕捉する場合のドップラー周波数(信号捕捉支援情報)を推定する。そして、衛星測位用ユニット3が、信号捕捉支援情報演算部9により推定されたドップラー周波数を用いて不使用の衛星信号を捕捉する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
位置推定方法、端末装置及びプログラム
【課題】位置推定方法、端末装置及びプログラムに関し、位置推定精度を低下させることなく端末装置の消費電力を低減することを目的とする。
【解決手段】端末装置の移動距離を算出し、移動方向の変化が検出されてから所定時間後に絶対位置を取得する処理を繰り返し、1回目の処理で取得した第1の絶対位置と2回目の処理で取得した第2の絶対位置を通る移動距離の長さを有する第1のリンクを算出し、第1及び第2の絶対位置と3回目の処理で取得した第3の絶対位置に最も近く第1の絶対位置を通らない移動距離の長さを有する第2のリンクを算出する。第1及び第2のリンクの第1の絶対位置に対する方位を示す角度の差が所定値以内であれば第2のリンクの角度を第1の絶対位置の直前のリンクと直後の第1のリンクとがなす角度とみなし、第1の絶対位置の直前のリンクと直後の第1のリンクを接続したリンク形状に基づいて端末装置の現在位置を推定するように構成する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
(もっと読む)
携帯端末
【課題】 携帯端末においてアプリケーションに位置情報を効率的に受け渡す。
【解決手段】 携帯電話100には、位置情報を利用する種々のアプリケーションがインストールされている。携帯電話100は、位置情報取得部を複数備えており、これらの位置情報取得部131を用いて位置情報を取得するとともに、アプリケーションに位置情報を受け渡すための位置情報管理部120を備えている。位置情報管理部120は、取得した位置情報を複数の形式で位置ログ121に蓄えている。アプリケーションから位置情報の要求が来ると、位置情報管理部は、位置ログ121に蓄えられた情報を受け渡す方法、新たに位置情報取得部のいずれかを利用して位置情報を取得する方法を比較し、要求された精度に適合した位置情報を最小の消費電力で取得可能な方法を選択して、位置情報の取得および受け渡しを行う。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
通信システム、通信方法、プログラム及び情報記憶媒体
【課題】近距離無線通信を用いることなく、同じ生活圏内にいる他のユーザの存在を実感できるようにすること。
【解決手段】複数のユーザ端末から位置を取得する位置座標受信部80と、注目ユーザ端末から位置を取得する場合に、前記複数のユーザ端末のうち、該位置と前記複数のユーザ端末から取得される位置とに応じた一部を選択するとともに、選択される前記ユーザ端末に関する情報を前記注目ユーザ端末に提供する近傍ユーザ配信部94と、を含む。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
支援型ユーザプロファイルによる性能向上した屋内ポジションロケーションのための方法および装置
ワイヤレス通信の方法は、ユーザプロファイル情報を保持することと、複数のポジションロケーションを受信することと、失敗した相関を決定するために、受信したポジションロケーションを相関させることと、受信したポジションロケーションにギャップがあるか否かに基づいて、ブラックアウト期間を決定することと、失敗した相関とブラックアウト期間とに対するロケーション情報を取得することと、取得したロケーション情報に基づいて、ユーザプロファイル情報を更新することと、緊急事態の通知を受信することと、ユーザプロファイル情報、または、緊急事態の通知とともに受信した緊急時のポジションロケーションのうちの少なくとも1つに基づいて、緊急事態の通知に応答することとを含む。 (もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
位置測定装置
【課題】基地局のエリアやユーザの操作のタイミングに基づかずに測位による消費電力を削減することができる位置測定装置を提供する。
【解決手段】位置測定装置が、予め定められた通常測位周期毎に現在位置を測定する測位部と、目的地と目的地到着予定時刻と現在位置とに基づいてルート検索を行い、1個以上の移動により目的地に到着する移動経路を決定し、移動経路の情報を生成するルート検索部と、最新の現在位置と移動経路の情報に含まれる移動開始位置との距離と移動開始位置に対応し移動経路の情報に含まれる移動開始時刻とに基づいて待ち時間ありと判断してから、移動開始位置に対応する移動開始時刻までの間、少なくとも最新の現在位置と移動開始位置との距離に基づいて移動中と判断するまでは、測定部が現在位置を測定する頻度を減らすよう制御する測位制御部と、を具備する。
(もっと読む)
電波発射源標定装置
【課題】電波発射源が静止していれば、電波発射源の位置を推定して表示し、電波発射源が移動していれば、電波発射源の移動経路を推定して表示することができるようにする。
【解決手段】静止/移動判定部3により電波発射源ESが静止していると判定された場合、静止位置推定部4がヒストグラムの中で最も密度の高い座標が示す位置が、電波発射源ESが静止している位置であると推定し、静止/移動判定部3により電波発射源ESが移動していると判定された場合、移動経路推定部5が方位測定部1から出力された複数の方位線の情報と予め設定された電波発射源ESの推定位置及び推定移動速度から、電波発射源ESの移動経路を推定する。
(もっと読む)
行動範囲把握方法および行動把握装置
【課題】GPS座標のような位置情報を用いずに、小型の端末を携帯するだけで、ユーザの移動経路のトポロジーを推定し、常時ユーザの行動を把握することができる行動範囲把握方法および行動把握装置を提供する。
【解決手段】行動把握装置100は、IEEE802.11のアクセスポイントが定期的に送信するビーコン信号を受信し、周辺に存在するアクセスポイントを特定する検出部101、特定されたアクセスポイントを検出周期毎の履歴データとして記憶する履歴保存部102、アクセスポイントの組み合わせが、それより過去の検出周期のものとほとんど一致しなくなる逸脱時刻および高い一致を示すようになる復帰時刻を特定し、逸脱時刻および復帰時刻において、把握済み経路上での位置を推定し、移動経路のトポロジーを推定する経路推定部103、および、移動経路のトポロジーを地図化してユーザの行動範囲として表示する表示部104を備える。
(もっと読む)
測位システム、端末装置、測位システムの制御方法、端末装置の制御方法、測位システムの制御プログラム及び端末装置の制御プログラム
【課題】GPS測位機能が組み込まれた端末装置をユーザの手に付けて歩行した場合、歩行に伴って手の位置が前後に振られるため、測位されたユーザの現在位置が微妙にずれることになる。
【解決手段】ユーザの歩行に伴い端末装置20が遥動状態にあるとき、遥動状態を検出した加速度センサ26aからの出力信号に基づいて、ユーザの腕が振られる基準周期時間29aを算出する。そして、端末装置20が遥動状態にあるときには、予め設定されている設定測位間隔29bを基に、基準周期時間29aの整数倍の時間の間隔で測位処理を行う。
(もっと読む)
初期位置補正機能を有する単独GPS測位による移動局の走行軌跡計測装置
【課題】基準局を不要としてコストを低く抑え、移動局の走行軌跡を地図上に重ね合わせて表示できる移動局の走行軌跡計測装置を提供することである。
【解決手段】移動局の走行軌跡計測装置は、自動車12や船舶等のようなビークルに搭載され、GPS衛星群10から発信されるGPS信号等に基づいてビークルの走行軌跡を計測する移動局14を備える。さらに、地上の所定位置を基準として、走行中のビークルが初期位置ラインLを通過する際に、当該ビークルとの距離Wを計測する距離計測手段24と、距離計測手段24によって計測された距離Wに基づいて初期位置ラインLを通過する際におけるビークルの位置を特定し、特定した位置に基づいて移動局14によって計測した走行軌跡の計測開始位置を補正する位置補正手段28とを有する。計測開始位置を補正するので、ビークルの走行軌跡を地図上に重ね合わせて表示できる。
(もっと読む)
位置補正装置
【課題】測位結果からバイアス誤差を適切に除去できるようにする。
【解決手段】本装置は、GPSで計測された位置座標を、GPS速度ベクトルと自律航法センサ出力とを用いて補正し、t=K・T時間前までに得た補正後の位置座標Pc(n),…,Pc(n−K)から、軌跡データ{Q(0),Q(1),…,Q(M)}を生成する。Q(m)は、現在地点Q(0)=Pc(n)から、長さm・dL遡った地点の位置座標であり、Q(M)=Pc(n−K)である。この他、本装置は、地点Q(0)を前回のバイアス誤差推定値Yで補正して座標Xを求め、座標Xから最短の道路上の座標R(0)を算出する。また、座標R(0)を基点に、長さdLで等間隔に配置される道路上の地点の位置座標R(1),…,R(M)を求め、道路区間データ{R(0),…,R(M)}を生成し、各地点の誤差Δ(m)=Q(m)−R(m)の重み付け平均εを、バイアス誤差として推定する。
(もっと読む)
1 - 20 / 31
[ Back to top ]