
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
201 - 220 / 352
測位装置
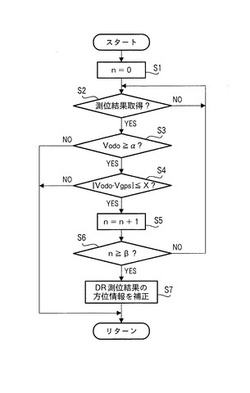
【課題】DR測位結果の補正を適切に実行する。
【解決手段】自律航法用のセンサと、各センサの計測値を算出するための所定の係数を保持する係数保持手段と、該所定の係数を用いて該計測値を算出する計測値算出手段と、計測値算出手段により算出された計測値を用いて測位演算を行う自律測位手段と、GPS航法により少なくとも該計測値に対応するパラメータの測位演算を行うGPS測位手段と、計測値算出手段により算出された計測値と、GPS測位手段により演算された、当該計測値に対応するパラメータの測位値との差を算出する差分算出手段と、差分算出手段により算出された測定値差と該所定の係数とを比較する比較手段と、比較手段による比較結果に基づいて自律測位手段の測位結果を補正する測位結果補正手段とを備えた測位装置を提供する。
(もっと読む)
現在位置推定方法、測位方法、プログラム及び移動体端末

【課題】移動体端末が停止している場合であっても、現在位置を正しく推定すること。
【解決手段】測位部であるGPS受信部10の測位終了の際に、最後に測位された測位位置を最新測位位置とし、その際に携帯電話用無線通信回路部70により無線通信されていた基地局(停止時基地局)の識別情報(ID)の組合せがフラッシュROM80に記憶される。そして、GPS受信部10の測位再開の際に、携帯電話用無線通信回路部70により無線通信されている基地局の組合せと、フラッシュROM80に記憶されている停止時基地局の組合せとが比較判定され、一致すると判定された場合に、フラッシュROM80に記憶されている最新測位位置が携帯型電話機1の現在位置と推定される。そして、推定された現在位置が初期位置とされて、測位再開の最初の測位に利用される。
(もっと読む)
現在地測位装置及び方法
【課題】ナビセンサ14(GPSセンサ)による現在地測位不調期間では、Gセンサ15の出力に基づき現在地を測位するポータブルナビゲーション装置10において、現在地の精度を改善する。
【解決手段】ナビセンサ14の検出信号をカルマンフィルタにより処理して、該検出信号中の白色性ノイズを除去して、最適推定加速度を抽出する。最適推定加速度に基づき、移動量を算出する。ナビセンサ14による測位正常期間の所定の現在地を始点に設定し、該始点からの移動量に基づき現在地を測位する。
(もっと読む)
携帯通信端末の相対位置特定システム、方法、プログラム、携帯通信端末
【課題】GPSなどが十分な能力を発揮できず、基地局圏外である屋内、屋外フィールドの環境下にある相手に対する相対位置を特定する。
【解決手段】捜査側の協力を行う携帯通信端末200Bでは無線ビーコン送受信部211,222,220で計測された最大の信号強度に対して方位計260で計測された方位、GPS計測部208,209に計測させた自局の絶対位置を無線送受信部211,210を介して捜査側の携帯通信端末200Aに送信させ、捜査側の携帯通信端末では被捜査側の携帯通信端末200Xに対して無線ビーコンを送出させ、無線ビーコン送受信部で計測された最大の信号強度に対して方位計で計測された方位、GPS計測部に計測させた自局の絶対位置と捜査側の協力を行う携帯通信端末200Bから受信した方位、自局の絶対位置とから三角測量の原理に基づき被捜査側の携帯通信端末に対する相対位置を特定し表示する。
(もっと読む)
ナビゲーション装置及び電子機器
【課題】消費電力を抑えることができるナビゲーション装置及び電子機器において、ユーザの好みを考慮できて使い勝手がよいものとする。
【解決手段】ナビゲーション装置1の動作モードには、通常動作モードと、通常動作モードよりも消費電力の少ない省電力動作モードと、があり、ユーザが、通常動作モードから省電力動作モードに切り替える切替タイミングを含む省電力動作モードの内容を設定するための操作部14と、ユーザによる操作部14の操作により設定された切替タイミングになったか否かを判定する判定プログラム163fを実行したCPU161と、判定プログラム163fを実行したCPU161により切替タイミングになったと判定されると、ナビゲーション装置1の動作モードを、通常動作モードから省電力動作モードに切り替える切替プログラム163gを実行したCPU161と、を備えるよう構成した。
(もっと読む)
位置情報補正システム及び位置情報補正方法
【課題】携帯端末装置の演算負荷の増大や大型化を回避しつつGPSで測位した位置情報を補正することができる位置情報補正システム及び位置情報補正方法を提供すること。
【解決手段】携帯端末1及びカーナビゲーションシステム3を搭載した車両の位置情報がサーバ装置4に送信される。サーバ装置4において、近傍車情報抽出部44が携帯端末1に現在最も近い車両を抽出し、その近傍車の情報を携帯端末1に送信する。携帯端末1は、近傍車の識別情報に基づいて、その近傍車に対して、通信制御部12を介して位置情報の誤差演算を要求する信号を送信する。カーナビゲーションシステム3は、携帯端末1からの誤差演算の要求信号を受信すると、GPSの位置情報の誤差を演算し、演算された誤差の情報を、通信制御部32を介して本サービスを利用する携帯端末1に送信する。携帯端末1は、誤差情報に基づいて、自装置のGPS15で測位した位置情報を補正する。
(もっと読む)
衛星受信装置
【課題】精度良く、かつ、より早期に現在位置を特定できるようにする。
【解決手段】信号処理部13が現在位置を特定するために必要な衛星データを収集したか否かを判定し(S104)、装置が起動してから、信号処理部13が現在位置を特定するために必要な衛星データを収集したと判定されるまで、ファン制御部40に冷却用ファン40aの駆動を停止させる(S100)。
(もっと読む)
携帯型情報端末及び携帯型情報端末の制御方法
【課題】出力された現在位置の信頼度を確認することができる携帯型情報端末を提供する
。
【解決手段】位置情報衛星から位置情報信号を受信して第1の現在位置を演算する第1の
現在位置演算部(ステップS42)と、移動距離及び移動方位を検出して第2の現在位置
を演算する第2の現在位置演算部(ステップS46)と、第1の現在位置演算部で第1の
現在位置を演算可能であるか否かを判断し、演算可能であるときに第1の現在位置演算部
を選択し、演算可能でないときに第2の現在位置演算部を選択する演算部選択手段(ステ
ップS43)と、該演算部選択手段で第2の現在位置演算部を選択したときに、第2の現
在位置の誤差推定量を演算する誤差推定量演算部(ステップS47〜S50)と、演算部
選択手段で第2の現在位置演算部を選択したときに、第2の現在位置と誤差推定量とを出
力する現在位置出力部(ステップS51,S46)とを備えている。
(もっと読む)
速度検知プログラム、位置特定プログラム、車載装置および携帯端末装置
【課題】車載端末装置と連携した携帯端末装置による位置捕捉において、携帯端末装置での処理負荷および消費電力を軽減すること。
【解決手段】車載装置2内の車速パルス取得部が車両から車速パルスを取得し、速度情報加工部が携帯端末での処理負荷を考慮して車速パルスを加工し、加工前の速度パルス周期以下の頻度で携帯端末1に送信することで、携帯端末1が速度情報を受信する際に必要な処理負荷を軽減し、消費電力を削減している。
(もっと読む)
位置検索システム、携帯端末及び位置検索方法
【課題】位置検索によって消費される消費電流を低減する。
【解決手段】測位衛星102から位置情報が送信され、地図情報提供サーバ104から無線基地局103を介して地図情報が送信され、それぞれが受信された携帯端末101にて、位置情報と地図情報とに基づいて携帯端末101の現在位置から次の分岐点までの距離が算出され、携帯端末101の移動速度が算出され、算出された現在位置から次の分岐点までの距離と移動速度とに基づいて、次の分岐点に到達する時刻が算出され、算出された時刻に携帯端末101の測位が行われる。
(もっと読む)
ナビゲーション装置
【課題】放送電波の受信に適した推奨経路を探索することができるナビゲーション装置を提供する。
【解決手段】電界強度に基づく推奨経路の探索では、リンクコストに対して電界強度リンクデータ30の電界強度分類値に基づいて重み付けを行い、その重み付けしたリンクコストによって推奨経路を探索する。電界強度分類値は電界強度を0〜5で分類した値である。たとえば、電界強度分類値が0のリンク、つまり電界強度が最も弱いリンクのリンクコストを100倍にし、電界強度分類値の値が5のリンク、つまり電界強度が最も強いリンクのリンクコストを0倍にする重み付けを行う。このようにすることによって、放送電波の電界強度が小さい道路を通過する経路のリンクコストは大きくなり、放送電波の電界強度が大きい道路を通過する経路のリンクコストは小さくなる。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
ナビゲーション装置の位置を特定する時間を改善するナビゲーション装置及び方法
ナビゲーションのための方法及び装置が開示される。少なくとも1つの実施形態において方法は、ナビゲーション装置の電源が入れられてナビゲーション装置の位置を特定するのにかかる時間を定める工程と、ナビゲーション装置の電源が入れられてからナビゲーション装置の位置を特定するのにかかる経過時間を確認する工程と、経過時間が定められた時間よりも劣っていると判断すると、ナビゲーション装置の電源を入れて位置を特定するのにかかる時間を改善するために情報を取得する工程とを含む。少なくとも1つの実施形態においてナビゲーション装置は、ナビゲーション装置の電源が入れられてナビゲーション装置の位置を特定するのにかかる時間を定め、ナビゲーション装置の電源が入れられてからナビゲーション装置の位置を特定するのにかかる経過時間を確認するためのプロセッサと、経過時間が定められた時間よりも劣っているとプロセッサが判断すると、ナビゲーション装置の電源を入れて位置を特定するのにかかる時間を改善するために情報を取得するための受信機とを備える。 (もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
測位方法及び測位装置
【課題】マルチパス環境下でも、精度良く自己位置推定ができる測位方法及び測位装置を提供することにある。
【解決手段】測位装置2は、平面内で規定した絶対座標系における座標位置を既知位置に配置された少なくとも3台の電波発信器の少なくとも一つについて直接波と反射波を共に設定し、直接波と反射波との別を考慮して前記電波発信器を3つ選択して組にし、各組毎に、各電波発信器からの電波の到来方位を用いて求めた座標位置から既知の電波発信器を見込むときの各電波発信器の存在方位を求めるとともに、到来方位と存在方位とを照合して到来方位と存在方位とが整合すると判定された直接波と反射波との別を考慮した電波発信器の組から得られた座標位置を採用する測位アルゴリズム処理部25を有する。
(もっと読む)
自律移動装置
【課題】マルチパス環境下においても精度良い測位ができ、走行経路に対して精度良く走行することができる自律移動装置を提供することにある、
【解決手段】自律移動装置1の測位部3は、平面内で規定した絶対座標系における座標位置を既知位置に配置された少なくとも3台の電波発信器21〜23からの電波の到来方位を用いて検出する。この際測位アルゴリズム処理部35は、電波発信器21〜23の少なくとも一つについて直接波と反射波とを共に設定し、直接波と反射波との別を考慮して電波発信器21〜23を3つ選択して組にし、各組毎に、各電波発信器からの電波の到来方位を用いて求めた座標位置から既知の電波発信器21〜23を見込む時の各電波発信器21〜23の存在方位を求めるとともに、到来方位と存在方位とを照合して到来方位と存在方位ととが整合すると判定された直接波と反射波との別を考慮した電波発信器の組から得られた座標位置を採用する。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
GPS測位装置
【課題】 マルチパスによる影響を低減し、測位精度の高い「GPS測位装置」を提供する。
【解決手段】 GPS測位装置は、移動体の高度情報Zoを記憶する高度情報メモリ34と、捕捉可能な複数のGPS衛星の中からGPS衛星の組合せを求める組合せ算出部30と、組合せ毎に移動体の3次元位置を計測する位置計測部32と、計測された3次元位置に含まれる高度情報Zと高度情報メモリ34かた提供される高度情報Zoとの差分を求める差分抽出部36と、抽出された差分としきい値とを比較し、差分がしきい値以下となるGPS衛星の組合せを選択し、選択された組合せの3次元位置に基づき移動体の測位位置を決定する位置決定部38とを有する。
(もっと読む)
携帯機器
【課題】オブジェクトの名称を表示してユーザに報知し、所望の被写体をユーザが間違ってしまうことを防止した携帯機器を提供する。
【解決手段】制御部3は、名称を被写体の映像とともに表示する。例えば、制御部3は、山71の名称「AB山」を示す文字71Aと、山72の名称「XY山」を示す文字72Aと、山73の名称「CD山」を示す文字73Aと、を表示部7に表示する。ハイキング中、装置本体100の位置周囲に存在する被写体の名称が分からない場合、ユーザは、レンズ20をその被写体の方向に向けて、その被写体を表示部7の撮影範囲に収めれば良い。これにより、表示部7において、その被写体の名称がスルー画像中に表示される(図5参照)。よって、ユーザは、その被写体の名称を知ることができる。
(もっと読む)
移動体通信装置、移動体通信装置の制御方法、および移動体監視システム
【課題】位置情報を取得できない場所にいる移動体の位置の推定精度を向上させることができる移動体通信装置、移動体通信装置の制御方法、および移動体監視システムを提供する。
【解決手段】地上の物体の位置を測位する測位手段から送信されてくる移動体の位置情報を所定時間ごとに取得を試み、移動体の位置情報を測位手段から所定時間以上取得できない場合、すでに取得した移動体の位置情報のうち最新の位置情報を管理装置へ送信する制御を行う。
(もっと読む)
201 - 220 / 352
[ Back to top ]