
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
41 - 60 / 352
測位装置、測位方法およびプログラム
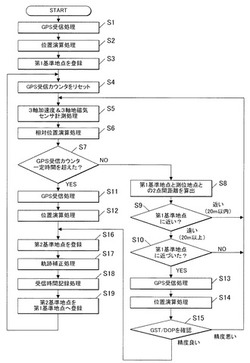
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
移動端末、移動通信システム、プログラムおよび制御方法

【課題】2つの測位方式により取得したデータを、より効率的に表示する。
【解決手段】第1測位手段11は、GPS方式により、自装置の位置を示す第1位置情報を取得する。第2測位手段12は、測位サーバ20を用いた方式により、自装置の位置を示す第2位置情報を取得する。第2方式は、第1方式よりも位置情報の精度が低く、かつ位置情報の取得にかかる時間が短い方式である。この例で、第2測位手段12は、測位サーバ20から送信される測位情報を用いて第2位置情報を取得する。施設情報取得手段13は、施設を識別するための複数の施設情報を、ネットワーク40上の情報提供サーバ30から第2位置情報に応じて取得する。並べ替え手段14は、施設情報取得手段13により取得された複数の施設情報の順序を、第1位置情報に基づいて並べ替える。表示手段15は、並べ替え手段14により順序が並べ替えられた複数の施設情報を表示する。
(もっと読む)
ナビゲーション信号送信装置および位置情報提供装置
【課題】屋内測位送信機からの測位信号による測位時間の短縮を実現することが可能なナビゲーション信号送信装置および位置情報提供装置を提供する。
【解決手段】情報提供サーバ1230は、携帯電話機1200から送られてくる送信機1210の送信機IDを認識すると、送信機IDに関連付けられているデータベースを参照して、そのIDに関連するSVG地図情報(地図を表示する情報と送信機IDと送信機の当該地図上の位置との対応関係の情報とを含む)を読み出す。情報提供サーバ1230が、SVG地図情報のデータを基地局1240に対して送信すると、基地局1240は、そのSVG地図情報のデータを無線発信する。携帯電話1200は、そのデータの着信を検知すると、携帯電話1200の使用者による閲覧操作に従って、そのデータから、送信機1210の位置を取得することができる。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 電車による移動を含む移動経路の軌跡を精度良く取得することのできる低消費電力の測位装置、測位方法、プログラムを提供する。
【解決手段】
現在位置を測定する絶対位置測定手段(15)と、絶対位置測定手段の動作タイミングを制御して非連続的に現在位置を測定させる測位制御手段(10)と、動作の計測を行う移動計測手段(15、16)と、移動計測手段の計測結果に基づいて動作種別の判定を行う動作内容判別手段(21)と、鉄道路線図の情報を記憶する地図データ記憶手段(13a)と、絶対位置測定手段により測定された位置情報、及び、鉄道路線図の情報に基づいて、動作内容判別手段により列車移動状態であると判定された期間の移動経路を判別する移動経路判別手段(10)と、を備える。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
測位装置、測位方法、および、プログラム
【課題】 測定精度の高い位置データおよび軌跡データを取得することのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段と、移動方向及び移動量を計測する移動計測手段と、移動計測手段により計測された移動情報を当該移動の始点の位置情報に積算していくことで現在位置を算出する自律測位手段と、絶対位置測定手段により求められた現在位置の精度指標と自律測位手段により求められた現在位置の精度指標とを比較して、より高精度な現在位置データを選択する位置選択手段とを備え、絶対位置測定手段により求められた現在位置データが位置選択手段によって選択された場合には、選択された現在位置を基準点として設定し、自律測位手段により求められた現在位置の精度指標は、基準点から累積的に精度が低下するように設定される。
(もっと読む)
電波発射源推定方向表示装置及び電波発射源推定方向表示方法
【課題】電波発射源による電波を受信した際に、地図上における自己の位置及び自己の位置に対する電波発射源の推定方向を容易に認識することができる電波発射源推定方向表示装置を提供する。
【解決手段】電波発射源からの電波を受信するアンテナ部と、到来方向を推定する到来方向推定処理部7と、アンテナ部の位置情報を取得するGPS受信機10と、アンテナ部の方位情報を取得する方位センサ11と、GPS受信機10により取得された位置情報に基づいてアンテナ部周辺の地図情報を取得するとともに、到来方向推定処理部7により推定された到来方向と方位センサにより取得された方位情報とに基づいてアンテナ部で受信した電波の到来方位を算出し、算出した到来方位とアンテナ部の位置とを取得した地図情報に重ね合わせて出力する地図表示処理部12と、アンテナ部で受信した電波の到来方位及びアンテナ部の位置を示した地図を表示する表示部13とを備える。
(もっと読む)
ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】ユーザによる検索およびユーザの移動に基づく履歴情報等のある地点に位置情報を補正することができるナビゲーションシステム、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、利用者の現在位置情報を取得し、取得された現在位置情報に基づく現在位置から所定範囲に存在する、検索履歴地点および移動履歴地点を、現在位置補正の候補地点として抽出し、現在位置情報、および、候補地点の地点情報を出力部を介して出力させ、利用者により入力部を介して出力された候補地点の地点情報が選択された場合、当該選択された当該地点情報に基づく当該候補地点を補正地点とし、当該補正地点を現在位置として補正する。
(もっと読む)
ゴルフ場運行管理システム
【課題】ゴルフカートの運行管理、および、プレイヤーへの情報提供を行うことのできるゴルフ場運行管理システムを低コストで実現する。
【解決手段】センター装置1と、ゴルフカートに設置される中継端末4を有するゴルフ管理運行システムにおいて、センター装置1と中継端末4の間のデータ通信をUHF無線で行い、クラブハウス内で、データ量が多い固定した初期データを予め、センター装置1と携帯端末8の間のデータ通信しておき、ゴルフコースに出てからは、携帯端末8とセンター装置1の間のデータ通信は、データ量の少ないプレイ中に変動する随時更新データのみを、中継端末4経由で行う。
(もっと読む)
携帯端末及び制御方法
【課題】GPS測位の方式を適切に決定し、消費電力を低減できる携帯端末及び制御方法を提供すること。
【解決手段】携帯電話機1は、複数の測位方式のうち選択された一の測位方式により、現在の位置に関する位置情報を取得する測位部32と、複数の地域と前記複数の測位方式とを対応付けた特定情報を記憶する記憶部70と、測位部32により取得された位置情報に基づく現在の位置が、特定情報に基づく前記複数の地域のいずれに該当するかを判定し、判定結果に応じて、複数の測位方式のうち所定の一の測位方式を選択する方式選択部33と、を備える。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、前記自立航法軌跡と地図情報が示す道路の形状とが最も一致する道路を前記車両が走行している道路とみなすマップマッチング処理によって特定される時系列の前記車両の軌跡であるマッチング軌跡を当該マッチング軌跡の信頼度とともに取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記GPS軌跡の信頼度を取得し、前記GPS軌跡と前記マッチング軌跡のうち、より高い信頼度の軌跡を補正目標軌跡とし、前記自立航法軌跡と前記補正目標軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えつつ、目的地に近づくと正確に測位を行えるようにする。
【解決手段】携帯端末は、第1測位部で測位し、現在位置から目的地までの距離が第1測位部の誤差の距離を超えている場合には、現在位置から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。携帯端末は、現在位置から目的地までの距離が第1測位部の誤差の距離未満である場合には、第2測位部に電力を供給して第2測位部で測位を行う。携帯端末は、第2測位部で測位した後、目的地に到達しているか否か判定し、目的地に到達している場合には、目的地に到達したことをユーザーに報知する。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できるようにする。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
(もっと読む)
ナビゲーション装置、位置補正方法
【課題】前回のマップマッチング結果に関わらず、正しいマップマッチング結果を得ることができるナビゲーション装置を提供する。
【解決手段】自車両の前方に分岐道路がある場合、分岐点の手前において、現在走行中の道路に対応するリンクと絶対推定位置21との間の距離を算出し、これを基準オフセットとして設定する。自車両が分岐点を通過すると、絶対推定位置22〜28を所定時間ごとに順次検出し、各絶対推定位置22〜28に対して、基準オフセットに基づいてマップマッチング候補とするリンクをそれぞれ探索する。リンクAが所定時間以上探索された場合、リンクAをマップマッチング対象道路に設定し、絶対推定位置28に対応するマッチング候補位置38を分岐点通過後のマッチング位置とする。
(もっと読む)
可搬型携帯端末及び方位推定プログラム
【課題】高精度な方位推定を実現する。
【解決手段】水平分力期待値推定部40が、可搬型携帯端末100の位置情報(Pos)に対応する、地磁気の水平分力の大きさの期待値(Mag_Hor_Ex)を取得し、選択部50は、地磁気センサ14において検出された地磁気の水平分力の大きさ(Mag_Hor)が、期待値から所定範囲内にあるか否かを判定し、その判定の結果、検出された水平分力の大きさが、所定範囲内にあると判定された場合に、地磁気センサ14の検出結果を用いた推定方位(Dir_Mag)を出力する。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
41 - 60 / 352
[ Back to top ]