
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
81 - 100 / 352
測位装置、位置データの記録方法およびプログラム

【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
測位装置、測位方法およびプログラム

【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
位置情報管理システムおよび位置情報管理方法
【課題】移動端末の測位をより精度よく行うことが可能な位置情報管理システムおよび位置情報管理方法を提供する。
【解決手段】通信システム10は、まず、移動機100の端末位置情報およびセクタ情報を取得し、当該端末位置情報が当該セクタ情報により定められたセクタ勢力図S1外を示しているか否かを判断する。そして、端末位置情報がセクタ勢力図S1外を示していると判断されると、当該セクタ勢力図S1上に、当該端末位置情報を補正する。このように、端末位置情報がセクタ勢力図S1に存在しないと判断されると、当該端末位置情報が当該セクタ勢力図S1上に補正されるため、本来はセクタ勢力図S1上に存在するはずの移動機100の端末位置情報をより適切に補正することができる。この結果、移動機100の測位をより精度よく行うことが可能になる。
(もっと読む)
リアルタイム測位システムにおけるデータベースの負荷低減方法
【課題】リアルタイム測位システムにおけるデータベースの負荷を低減する。
【解決手段】
携帯装置を測位するよう動作可能な測位システムおよび方法は、無線信号を送信するよう動作可能な携帯装置を備える。無線ネットワークが、無線信号を受信し、携帯装置の位置を推定するために使用されるデータを報告するために使用される。測位サーバーが、無線ネットワークによって報告されたデータを無線ネットワークによって処理するために使用される。測位サーバーは、携帯装置に対して複数の測位レポートを生成する。前処理構成要素が測位サーバーと通信するよう動作可能である。測位サーバーによって生成された測位レポートは前処理構成要素に転送される。測位アプリケーションが、前処理構成要素と通信するよう動作可能であり、携帯装置に関する記録を保存するよう動作可能なデータベースとインタフェース接続する。前処理構成要素は、測位レポートを処理し、データ記録中のデータが規定された基準を満たす場合にのみデータ記録を保存する。 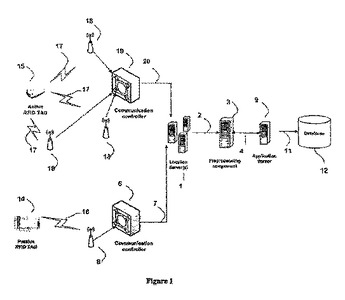 (もっと読む)
(もっと読む)
位置把握システム
【課題】低出力の通信手段を用いて、被管理者の位置情報を把握することができるとともに、監視エリアの変更に対して容易に対応することができる位置把握システムを提供する。
【解決手段】作業者12に装着される送受信機21から受信した位置情報を処理し、その処理に基づいて作業者12の位置を把握する監視センタ15を備える。送受信機21と監視センタ15との間には、それらの間の信号の伝達を中継する中継装置14を設ける。作業者12の位置情報に基づいて作業者12が仮想エリアの外に逸脱したことを判別する。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
測位システム及び制御方法
【課題】移動局無線機12の測位において、各地点の電界強度を事前に実測すること及びビーコン送信機11−移動局無線機12間の距離を計算することを省略し、かつビーコン送信機11の配備数を少なくする。
【解決手段】複数のビーコン送信機11は、測位空間19内にほぼ等密度で分布して配備され、自機のIDを含むビーコンを周囲へ発射する。移動局無線機12のビーコン受信機13は、近辺のビーコン送信機11からのビーコンを受信して、その電界強度を測定する。基地局15では、移動局無線機12からビーコン情報を受信し(S51)、ビーコン送信位置情報テーブルを参照して、ビーコン送信位置を求める(S52)。さらに、各ビーコンについて送信位置と移動局無線機12における電界強度の比とに基づき移動局無線機12の現在位置を算出する(S53)。
(もっと読む)
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
(もっと読む)
GPS追跡システム
【課題】GPS追跡システムの提供。
【解決手段】このGPS追跡システムは、追跡定位装置、サーボモータ、定位表示装置、及びデータベースを包含する。該追跡定位装置はインターネットに接続する時だけワンタイムのIPデータ及び認証データを伝送し、並びに定位表示装置で見るときにはじめて定位データを伝送できるため、周波数幅を節約できる。
(もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
路車間通信システム
【課題】路車間通信において得られた情報を用いることで自車両の位置を特定する精度を向上させた路車間通信システムを提供することを課題とする。
【解決手段】トンネル入口付近に設けられた情報提供装置11と車載されたナビゲーションシステムとの間で通信を行う路車間通信システムにおいて、情報提供装置11は設置された位置情報ならびに情報提供装置11より先の道路の道路線形情報を送信提供し、ナビゲーションシステムは、情報提供装置11から送信提供された情報を受信する送受信部12と、CAN14を介して収集された自車両の挙動を認識する走行状態認識部154と、GPS13により自車両の位置を認識する位置認識部152と、情報提供装置11から送信提供された情報に基づいて自車両の位置を補正し、補正された自車両の位置と自車両の挙動とに基づいて、自車両の位置を特定する自車位置処理部155とを備えて構成される。
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
測位装置
【課題】マルチパスなどの衛星信号に対する悪影響を状況に応じて適切に除去できるようにして、的確な測位を行えるようにする。
【解決手段】アナログ部3A,3B,3Cにおいては、衛星信号に含まれるよけいな帯域外のノイズ成分をカットするフィルタリング処理を行うときに絞り込む帯域の幅が、アナログ部3A、アナログ部3B、アナログ部3Cの順に漸次広くなるように設定されている。そして、各デジタル信号処理部4は、アナログ部3A,3B,3Cのうちいずれか一つを選択して、その選択したアナログ部の処理した衛星信号を使用する。
(もっと読む)
移動体用測位装置
【課題】疑似距離の異常に関する判定をより正確に行なうこと。
【解決手段】複数の衛星から送信される衛星電波を用いて該複数の衛星と移動体との疑似距離を算出することにより、該移動体の位置を算出する位置演算手段と、前記衛星電波から把握される衛星の位置と、前記位置演算手段又は他の手段により算出された前記移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、を備え、前記視線ベクトル算出手段により算出された視線ベクトルと、前記リンクのうち移動体が存すると推定されるリンクと、のなす角度が所定角度を超える衛星について、前記地図データを用いたマップマッチングにより把握される前記移動体の位置を用いて、前記位置演算手段が算出する疑似距離の異常に関する判定を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
端末位置検出システム及び船員位置管理システム
【課題】無線LANによって端末位置を検出する端末位置検出システムにおいて、様々な原因で生じる検出位置精度の低下を抑制する。
【解決手段】端末位置検出システム1が備える複数の中継機3は、検出対象者100が携帯する無線LAN端末装置2から送信される無線フレームを受信し、その受信状態に関する受信状態情報を作成する。位置演算装置4は、中継機3から取得した受信状態情報に基づいて、それぞれの無線LAN端末装置2の位置を演算により推定し、表示装置5に表示させる。ただし、推定された現在の無線LAN端末装置2の位置が、当該無線LAN端末装置2の過去の位置を含む所定範囲から外れていた場合は、推定された現在の無線LAN端末装置2の位置は誤りと判定され、表示装置5に表示されない。
(もっと読む)
移動無線機、基地局、位置情報管理装置
【課題】基地局圏外に所在する移動無線機の位置情報を管理することを目的とする。
【解決手段】複数の移動無線機と基地局13との間で無線通信を行う無線通信システムに用いる移動無線機11であって、GPS衛星14からの電波を受信するGPSアンテナ21と、GPSアンテナ21で受信した信号から自己の位置を測定し位置情報として出力するGPS受信部22と、自身の移動無線機に固有の第1移動無線機IDを位置情報に付加する制御部23と、制御部から位置情報及び第1移動無線機IDを受け、送受信アンテナを介して一定周期で他の移動無線機へ位置情報及び第1移動無線機IDを送信する送受信部24と、を備える。
(もっと読む)
位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム
【課題】サーバから配信されるGPS測位の測位誤差情報を参照し、必要な区間のみセンサと連携したGPS測位を実行する。
【解決手段】複数の位置情報取得装置が、GPS測位系を用いて位置情報を取得し、所定の条件を満たしたときに、GPS測位時の推定位置誤差情報を検出して、取得した位置情報と検出した推定位置誤差情報とをデータサーバに送信する。一方、データサーバは、複数の位置情報取得装置から位置情報と推定位置誤差情報とを受信し、地図情報を所定の単位のブロックに分割し、該受信した情報から各ブロックに対応する推定位置誤差に関する分布データベースを生成して、その生成したデータベースに基づいて、各位置情報取得装置に推定誤差分布情報を送信する。そして、複数の位置情報取得装置は、その推定誤差分布情報を受信し、その受信したGPS測位時の推定誤差分布情報に基づいて、測位方法を選択して、その選択した測位方法により、位置情報を取得する。
(もっと読む)
衛星信号受信装置
【課題】特別な操作を行うことなくアンテナの指向特性を窓方向に向けるようにしてアンテナの受信強度を室内においても高める。
【解決手段】まず、アンテナ2で受信信号の信号強度を受信強度判定部17で推定する(ステップS2)。受信信号の信号強度が基準値を下回っているときは(ステップS3のY)、太陽光方向判定部15が太陽光の来る方向は受光素子6,7,8,9のうちのどちら側の方向であるかを推定する(ステップS4)。そして、その窓側に向いていると推定された受光素子6,7,8又は9に対応しているアンテナ2,3,4又は5が受信部16と接続されるように、スイッチ11,12,13又は14の何れかひとつを閉じる(ステップS5)。
(もっと読む)
81 - 100 / 352
[ Back to top ]