
Fターム[5J070AA04]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | データ伝送(レーダリレー) (180)
Fターム[5J070AA04]の下位に属するFターム
Fターム[5J070AA04]に分類される特許
1 - 20 / 147
レーダ通信装置
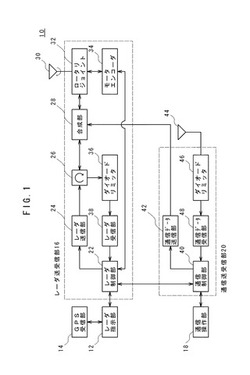
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
(もっと読む)
レーダ通信装置

【課題】空中線が回転駆動して他船の船舶に対して、通信データを送信することが可能なレーダ通信装置を提供する。
【解決手段】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部14と、通信データの送受信を行う通信送受信部18とを備え、通信データをレーダ波に合成して送受信することにより空中線が回転する他船と通信する装置であって、自船の空中線を回転駆動するモータを制御するモータ制御部52と、他船の真方位θtを取得し、他船の空中線の回転周期Tを算出し、自船の空中線θsが他船の空中線に対して正対するときの時刻である正対時刻tを算出するレーダ制御部12と、を有し、モータ制御部52は、自船の空中線を、レーダ制御部26によって算出された正対時刻tまでに、他船の真方位θtに自船の空中線の真方位θsが一致する位置に待機させ、通信送受信部16は、他船と通信する。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
受信装置および受信方法
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】モードS信号を受信する受信装置であって、受信信号を直交検波する直交検波部2と、直交検波後の受信信号に対して周波数オフセットを補償する周波数補償部5と、周波数オフセットの補償後の受信信号に基づいて先行波の到来時刻である先行波到来時刻を推定する先行波検出部3と、周波数オフセットの補償後の受信信号のプリアンブル部と先行波到来時刻とに基づいて、伝搬路の推定を行う伝搬路推定部6と、伝搬路推定部6による推定結果に基づいて、周波数オフセットの補償後の受信信号に対してマルチパスによる歪みを補償する等化処理を行い、等化処理結果に基づいてビット判定を行う等化部7と、を備える。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
レーダ装置及び質問送信方法
【課題】他局のレーダ装置と連携して確実に目標を検出できるようにする。
【解決手段】本実施形態に係るレーダ装置1Aは、自局覆域と一部の覆域が重なる他局のレーダ装置1Bと通信回線を介して接続され、アンテナ11から目標に質問信号を送信し、目標からの応答信号を受信する送受信部12と、他局から目標の位置情報を通信回線を介して取得する通信処理部14と、通信処理部14により取得された目標の位置情報に基づいて上記一部の覆域から一定幅の外側領域に目標が進入するタイミングで質問信号を送信させる質問制御部14とを具備する。
(もっと読む)
目標追尾処理装置及び目標追尾処理方法
【課題】 設定された航跡モデルを有効、かつ、適切に利用できるようにして、常に高精度で信頼性の高い航跡推定が行えるようにする。
【解決手段】 目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部21と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部21による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニット25(25a〜25n)と、を備える。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
航空管制装置、航空管制システムおよび航空管制方法
【課題】
本発明は、航空機の航空管制におけるシステムハンドオフを実施する際、引き継ぎ先の航空交通管制部が当該航空機の最新の飛行計画情報を保持していない場合でも、適切にシステムハンドオフを実施することが可能な航空管制装置、航空管制システムおよび航空管制方法を提供することを目的とする。
【解決手段】
本発明に係る航空管制システム10は、移管元の航空管制装置30から引継対象航空機の航空機情報を含んだ業務引継依頼を受信した場合、該業務引継依頼から航空機情報を読み出して飛行計画情報管理装置40へ送信し、飛行計画情報が返信された場合、該返信された飛行計画情報に基づいて引継対象航空機の航空管制を引き継ぐ移管先の航空管制装置20と、航空機の飛行計画情報を管理すると共に、航空機情報を受信した場合、該受信した航空機情報に対応する飛行計画情報を返信する飛行計画情報管理装置40と、を備える
(もっと読む)
航法補完装置およびレーダ装置
【課題】本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関し、従来例に比べて構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和し、または回避できることを目的とする。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
(もっと読む)
車載レーダシステム
【課題】ノイズ環境に応じた適切なノイズ対応処理を実施し、物体の誤検出を防止しつつレーダ性能を確保する。
【解決手段】ノイズ源200を中心とする円形の領域を設定し、この円形の領域を、比較的マルチパスの少ない領域R1と、マルチパスの発生が多く、自車両100のレーダ性能に重度の影響が予想される領域R2とに区分する。そして、測位装置からの測位情報により、自車両100の現在位置が領域R1内にあるとき、車載レーダ装置の受信信号のサンプリング間隔と送信電力との少なくとも一方を自車両100の進行方向に応じて変更し、自車両100が領域R2内に進入したときには、ノイズ源の出力の規則性に基づいて受信信号を取得する処理を行う。これにより、ノイズ環境に応じた適切なノイズ対応処理を実施するので、ノイズ環境下においても物体の誤検出を防止しつつレーダ性能を確保することができる。
(もっと読む)
信号処理パラメータ解析装置及びレーダ装置
【課題】レーダ装置との距離にかかわらず且つ作業者による作業を必要とせずに、レーダ装置における最適化された受信信号処理を行うための種々のパラメータを決定する信号処理パラメータ解析装置及び当該信号処理パラメータ解析装置により決定されたパラメータを使用するレーダ装置を提供する。
【解決手段】外部のレーダ装置(ASR装置1)により出力されたデジタルIQ信号に基づく受信信号データを保持するデータ保持部12と、所定のタイミングでデータ保持部12により保持された受信信号データを用いてレーダ装置(ASR装置1)において行われる信号処理に必要なパラメータを算出するパラメータ算出部(係数決定部13)とを備える。
(もっと読む)
レーダ乱気流測定値に対する近接距離からの乱気流の危険性の推定
【課題】航空機搭乗員に乱気流の危険性を伝えるシステムおよび方法を提供する。
【解決手段】気象レーダシステム40は、3次元バッファ43、プロセッサ42、および表示部44を含む。プロセッサは、気象レーダ反射率値を受信し、受信された気象レーダ反射率値を3次元バッファ内に記憶し、記憶されたそれぞれの反射率値に基づいて乱気流値を生成し、それらを3次元バッファのセル内に記憶し、第1の閾値よりも大きい乱気流値を含むように決定された3次元バッファ内のセルから事前定義された閾値距離内に位置するセルに関する第1の表示アイコンを生成する。表示部は、関係するセルが表示用に3次元バッファから選択されるとき、第1の表示アイコンを表示する。前記プロセッサは、他の閾値よりも大きい乱気流値を有するセルの事前定義された閾値内にあるセルに関する他の表示アイコンを生成し、そして出力するようにさらに構成される。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
無線タグシステムおよびそのタグリーダならびにタグ管理サーバ
【課題】案内情報などが登録されて屋外や屋内の適所に配置されるパッシブRFタグの位置を利用者が簡単に認識して所望の情報を確実に得られるようにした無線タグシステムおよびそのタグリーダならびにタグ管理サーバを提供する。
【解決手段】複数のパッシブRFタグ2が分散配置された地域には、当該地域をカバレッジとするアクティブRFタグ1が配置されている。このアクティブRFタグ1からは、自身のカバレッジ内に配置されている多数のパッシブRFタグ2(2a,2b…)の位置情報を取得するための識別情報が周期的に送信される。携帯端末3は、アクティブRFタグ1から識別情報を取得し、これを位置要求メッセージに記述して所定の管理サーバへ送信すると、当該管理サーバから前記位置情報の添付された位置応答が返信され、その表示部に表示される。
(もっと読む)
センサネットワークシステムおよびセンサ装置
【課題】さらに高い追尾性能を実現するセンサネットワークシステムを得ること。
【解決手段】本発明は、複数のセンサ、および複数のセンサを制御する制御装置を含んだセンサネットワークシステムであって、制御装置は、センサの各々における観測結果に基づいて、どのセンサからどのような情報を出力させるかを示す情報である優先度の暫定値をセンサ毎に決定し、センサの各々は、近隣のセンサとの間で観測動作に関する情報を交換し、得られた観測動作情報に基づいて、制御装置で決定された自センサの優先度の暫定値を調整し、制御装置は、各センサで調整された後の優先度に基づいて通信帯域制御を行う。
(もっと読む)
センサネットワーク装置
【課題】通信量を抑制した、ネットワーク装置を提供。
【解決手段】状況推定部15は、接続されたそれぞれのセンサ装置100に関する推定規則を予めあるいは定期的に交換し共有保持し、推定規則に関するシミュレーションを行うことにより、状況情報とで判断した表示要求満足性を付与した表示要求送付情報、状況情報とで判断した優先度を付与した制御要求送付情報、また、センサ装置10の状況情報については変化が認められた場合にすべての送付先への状況送付情報を生成するよう動作し、表示要求管理部11は、表示要求送付情報を表示要求管理部に送るよう動作し、表示情報管理部14は、他装置から受信した表示要求送付情報の表示要求満足性で表示情報必要性が肯定されている場合にのみ、センサ装置100で生成された表示情報を要求元の他装置へ送付するよう動作し、制御要求管理部12は、制御要求送付情報を、対応する他装置の制御要求管理部へ送付する。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
SAR(SyntheticApertureRadar)重畳データ生成装置、SAR重畳データ再生装置、SAR重畳データ生成プログラム、SAR重畳データ再生プログラム、SAR重畳データ生成方法およびSAR重畳データ再生方法
【課題】SAR(合成開口レーダー)と光学センサとによる同時観測においてSAR画像と同じデータ量でSAR画像と光学画像とを伝送し、地上での画像再生処理においてSAR画像と光学画像とを別々に画像化できるようにすることを目的とする。
【解決手段】SAR/光学観測衛星110では、(1)SAR111と光学センサ112とにより地上の同じ地域を観測し、(2)SAR/光学伝送装置200によりSAR111の観測データと光学センサ112の観測データとを重畳させた重畳データを生成し、(3)重畳データをダウンリンクする。地上センタ120では、(4)SAR/光学再生装置300により重畳データからSAR画像と光学画像とを再生する。(2)においてSAR/光学伝送装置200は、光学センサ112で撮像した光学画像に対してSAR再生処理の逆処理をし、逆処理した光学画像を符号化して光学センサ112の観測データを生成する。
(もっと読む)
建築物診断システム
【課題】電力消費電力を削減し、使い勝手が良く、小型化や安全性の面で優れた建築物診断システムを実現する。
【解決手段】複数の同軸ケーブル40によりタンデム状に接続された中継モジュール10、及び複数のセンサ26付きのRFIDモジュール20−1,20−2,・・・により構成されて壁等に埋設される伝送路と、リーダ/ライタモジュール50との間に、中継モジュール10を設け、その伝送路とリーダ/ライタモジュール10とを分離している。前記伝送路は、使用しない時には、給電の必要がない。使用時に、リーダ/ライタモジュール10から中継モジュール10を介して前記伝送路へ給電される。RFIDモジュール20に接続されたセンサ26の検知信号は、前記伝送路及び中継モジュール10を介してリーダ/ライタモジュール10にて読み取る。
(もっと読む)
1 - 20 / 147
[ Back to top ]