
Fターム[5J070AA11]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | インターフェローメータ方式 (21)
Fターム[5J070AA11]に分類される特許
1 - 20 / 21
複合誘導装置及び複合誘導方法
【課題】広い周波数帯でのインターフェロメータでの測角処理を短時間で効率良く行い得る。
【解決手段】飛しょう体における略円筒筐体となるレドーム先端の円形領域の中央に配置され、レドームを通じて飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、レドームの側面に周面に沿って配置され、第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群と、観測する周波数帯に応じて第1のパッシブアンテナ素子群のうち配列間隔が異なる複数の素子を選択し、これら選択した複数の素子それぞれの受信信号及び第2のパッシブアンテナ素子群のうち任意の素子の受信信号を用いて目標方向の方位角及び高低角のうちの少なくとも1つを粗測角演算するパッシブ信号処理部と、パッシブ信号処理部で得られる粗測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段とを備えた複合誘導装置を提供できる。
(もっと読む)
画像表示装置

【課題】差分画像または干渉画像内の移動目標の視認性の向上を図るとともに、原画像の画像情報を差分画像または干渉画像の情報と共に併せて確認することが可能な、画像表示装置を得る。
【解決手段】同じ撮像エリアを含む複数の原画像1,2に対して位置合わせを行うレジストレーション部3と、それらの位相補正を行う位相補正部4と、位置合わせおよび位相補正が行われた原画像1,2を用いて、それらの画像の差分画像であるDPCA画像8(または干渉画像)を作成する差分画像生成部5と、当該DPCA画像8に利得を付与する利得付与部6と、原画像1,2の各々および作成されたDPCA画像8(または干渉画像)に、互いに異なる配色(赤、青、緑)を割り当て、それらを重畳して表示する画像重畳部7とを備えている。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】ScanSARモードで観測されたデータからレーダ画像を効率的に生成する。
【解決手段】画像処理装置100において、バーストデータ記憶部101は、ScanSARの各バーストに対する地上からの散乱波のデータをバーストデータとして記憶装置152に記憶する。スキャンデータ生成部102は、記憶装置152からバーストデータを、対応するスキャンごとに処理装置151により読み出して、スキャンごとに、読み出したバーストデータの隙間をゼロで埋めてスキャンデータを処理装置151により生成する。画像処理部103は、スキャンごとに、スキャンデータ生成部102により生成されたスキャンデータからレーダ画像を処理装置151により生成する。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
(もっと読む)
移動目標検出装置
【課題】地上面を低速度で移動する移動目標をより確実に検出することができる移動目標検出装置を得る。
【解決手段】所定の観測時間差を有する第1の観測地点及び第2の観測地点における観測時期を設定する観測時期設定手段20と、アンテナから取得された2枚のSAR画像を格納するデータ格納部40a、40bと、データ格納部に格納された2枚のSAR画像間の位相差をそれぞれ算出する位相差算出手段50a、50bと、第1の観測地点の位相差から、移動目標の第1の位置および移動速度を特定するとともに、移動目標が移動速度で第2の観測地点まで移動した際の第2の位置を推定する移動目標位置推定手段60と、第1の位置における位相差と、第2の位置における位相差とが、ともに所定閾値よりも大きい場合に、移動目標を真の移動目標と判断する移動目標検出手段80とを備える。
(もっと読む)
距離ゲートを用いたホログラフィックレーダ
長期間持続するずらされたパルス繰り返し間隔(PRI)による伝送パルスによって狭い仮想伝送パルスが合成される。PRIは、中間周波数IFでずらされる。仮想パルスのエコーが参照波を有するIF変調干渉パターンを生成する。干渉パターンのサンプルにおいては、フィルタリングによって中間周波数が除去され、それによって高空間分解能のホログラフィックデータを生成する。PRIスタガは、例えば1nsと非常に小さくてよく、非常に長いずらされた伝送パルスから1nsの仮想パルスを生じ得る。ホログラフィには長いRFパルスが必要なことから占有帯域幅(OBW)は、10MHz未満でよく、一方、空間分解能は、短い仮想パルスによる超広域(UWB)動作に対応して非常に高くできる。アンテナのXY軸に沿った走査により、直角位相データから距離ゲート表面ホログラムを生成できる。複数の距離ゲートにより距離範囲内に積層ホログラムを形成することができる。距離ゲート区域内の干渉パターンの変化によって動きおよび振動を検出できる。 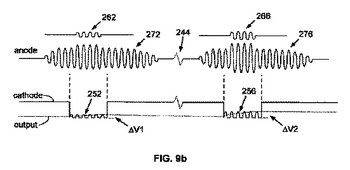 (もっと読む)
(もっと読む)
レーダ画像信号処理装置
【課題】位相差分布をスペクトル解析し、地形位相を過不足無く除去して、地表面変化の検出を可能にしたレーダ画像信号処理装置を提供する。
【解決手段】互いに異なる軌道から同一エリアを観測した複数のレーダ画像を格納する格納部、格納された同一エリアを観測した複数のレーダ画像の位相差分布を計算する位相差計算部、位相差分布をスペクトル解析して位相差分布の周波数スペクトルを演算するスペクトル解析手段、閾値、軌道差により生じる地形位相に関する模擬や過去の地形位相スペクトルデータのいずれかとの比較により位相差分布の周波数スペクトルから地形位相スペクトルを求める地形スペクトル演算手段、求めた地形位相スペクトルにスペクトル解析手段での逆変換を行って地形位相を求める逆変換手段、位相差計算部で計算した位相差から求めた地形位相を除去する地形位相除去部、を備える。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
測角処理装置
【課題】リアルタイム性を維持しつつ、到来信号の測角時における角度アンビギュイティを除去するとともに、良好な精度の測角結果を取得する測角処理装置を得る。
【解決手段】インターフェロメータ方式により到来する信号の測角処理を行う際に、到来する信号を空中線部内の測角用の複数のアンテナ素子で受信し、その中の1つのアンテナ素子で受信した受信レベルと、合成ビームとして和のパターンにより受信した受信レベルとを取得して、これらを比較する。そして、和のパターンによる受信レベルが1つのアンテナ素子による受信レベル以上の場合に、角度アンビギュイティのない測角対象範囲内から到来した信号としてインターフェロメータ方式による測角処理を行うとともに、それ以外の場合には測角対象範囲外の信号として棄却する。
(もっと読む)
測角処理装置
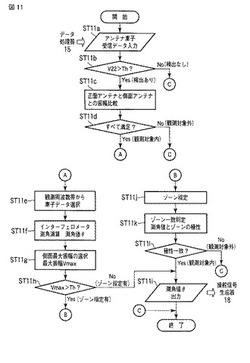
【課題】レドームの影響等を受けつつ広角方向から到来する信号を測角対象範囲外として除去するとともに、測角対象範囲内の到来信号に対して良好な測角結果を得る。
【解決手段】インターフェロメータ方式を用いた測角処理装置において、レドームが装着された空中線本体の複数のアンテナ素子で受信した受信信号の受信振幅をそれぞれに取得し、これら受信振幅相互間の最大振幅差を算出する。そして、この最大振幅差を、あらかじめ設定されたしきい値と比較し、しきい値を超えない受信信号に対しては、レドームによる影響等の少ない正面方向寄りの角度範囲からの到来信号としてインターフェロメータ方式による測角を行うとともに、しきい値を超えた受信信号は、レドームによる影響等の大きい広角方向寄りの角度範囲から到来したものとして棄却する。
(もっと読む)
干渉合成開口レーダシステム、処理方法、指向角度補正装置、指向角度補正方法及びプログラム
【課題】2回の観測間における合成開口レーダの軌道が平行でない場合における観測データ間の相関度を改善する。
【解決手段】地上の解析装置において、合成開口レーダ衛星100の1回目の観測における軌道及び2回目の観測における軌道を算出し、1回目の観測における軌道と2回目の観測における軌道とが成す軌道交差角を算出する。解析装置は合成開口レーダ衛星100に軌道交差角の情報を送信し、合成開口レーダ衛星100は、軌道交差角に基づいてアンテナの指向性の角度を制御する。
(もっと読む)
合成開口レーダ装置
【課題】 マルチチャンネルを有した受信系を簡略化し、発生データレート及びデータ量の抑制を可能とした合成開口レーダ装置を得ることを目的とする。
【解決手段】 複数のアンテナと、前記それぞれのアンテナの受信信号毎に異なるパルス間位相変調を施す移相器と、前記移相器によりパルス間位相変調を施したそれぞれの受信信号を合成する合成回路と、前記合成回路により合成された受信信号に対し、前記パルス間位相変調系列毎の逆相データをそれぞれ掛け合わせることにより復調処理する複数の復調器と、前記復調器により復調された信号について、それぞれ異なる画像化処理を行う複数の画像化処理装置とを備える。
(もっと読む)
情報処理装置及び情報処理方法及びプログラム
【課題】航空機や人工衛星等の移動プラットフォームに搭載され、地表面の高分解能画像及び高度情報を得る干渉型合成開口レーダ装置において、自機高度の測定誤差による地表面の高度情報の誤差を推定して補償することを可能とした干渉型合成開口レーダ装置を提供する。
【解決手段】機体の機軸と直交する平面内で直線状に3つ以上のアンテナ1〜3を配置し、この3つのアンテナで受信されたパルス信号及び動揺センサ4の計測結果を用いて3つの合成開口レーダ画像7を取得し、更に、3つのレーダ画像から2つの観測領域の高度情報9を取得し、2ベースラインによる誤差推定部10が、この得られた高度情報の差分から誤差を推定して補償し、インタフェロメトリ再処理部11が、再度干渉型合成開口レーダの処理を行うことにより、地表面の高度誤差が抑圧された誤差抑圧後の観測領域の高度情報12が得られる。
(もっと読む)
SAR画像を圧縮する方法および装置
合成開口レーダー(SAR)画像を圧縮するコンピュータ・システム60は、圧縮されるべきSAR画像を記憶するデータベースと、データベースからのSAR画像を圧縮するプロセッサ69とを有する。前記圧縮は、非等方拡散アルゴリズムを前記SAR画像に適用する段階と、前記SAR画像に前記非等方拡散アルゴリズムを適用したのちに前記SAR画像を圧縮する段階とを有する。前記非等方拡散アルゴリズムを適用する段階は、前記SARにおけるノイズを判別する段階と、判別されたノイズに基づいて前記SAR画像についてのノイズ閾値を選択する段階と、選択されたノイズ閾値に基づいて前記非等方拡散アルゴリズムを数学的に調整する段階とを含む。 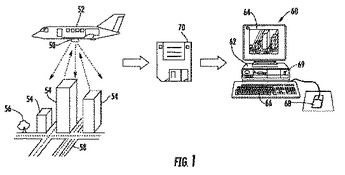 (もっと読む)
(もっと読む)
複素非等方拡散フィルタリング・アルゴリズムに基づいてSAR画像を処理する方法および装置
複素合成開口レーダー(SAR)画像を処理するコンピュータ・システム(60)は、処理されるべき複素SAR画像を記憶するデータベースと、データベースからの複素SAR画像を処理するプロセッサ(69)とを有する。前記処理は、複数のピクセルを有するSAR画像についての複素SARデータ・セットを受け取り、その複素SARデータ・セットに複素非等方拡散アルゴリズムを適用することを含む。複素SARデータ・セットは各ピクセルについて実部と虚部をもつ。 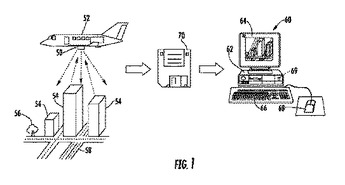 (もっと読む)
(もっと読む)
非等方拡散フィルタリング・アルゴリズムに基づいてSAR画像を処理する方法および装置
合成開口レーダー(SAR)画像を処理するコンピュータ・システム60は、処理されるべきSAR画像を記憶するデータベースと、データベースからのSAR画像を処理するプロセッサ69とを有する。前記処理は、処理されるべきSAR画像におけるノイズを判別する段階と、判別されたノイズに基づいて前記SAR画像についてのノイズ閾値を選択する段階と、選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整する段階とを含む。調整された非等方拡散アルゴリズムをがSAR画像に適用される。  (もっと読む)
(もっと読む)
多次元イメージ化の方法および装置
【課題】空間における反射点で反射された信号を検知することによって、これらの位置を定めるために、電磁気信号の送信を用いる方法およびシステムを提供すること。
【解決手段】本発明は、マイクロ波を用いて、反射点の位置を定めるための方法、アンテナおよびシステムである。電磁波信号が、決められた周波数で生成されて、アンテナユニットにより送信される。アンテナユニットは、送信アンテナと、主視線の方向と垂直な方向に既知の間隔に分離されており、送信された波の反射された一部を受信するように工夫されている多数の受信アンテナとを含んでいる。位相比較手段が送信アンテナおよび受信アンテナに接続されており、該位相比較手段と接続されている制御ユニットは、反射点への角度を計算すること、および該反射点への距離を計算する動作が可能である。
(もっと読む)
地形援助型航法システムの精度を高めるための方法およびシステム
航法プロセッサ(208)と、航法プロセッサに位置解を提供するように構成される慣性航法ユニット(206)と、デジタル標高地図(212)とを含む、航法システム(200)が説明される。説明される航法システムは、デジタル標高地図から地図データを受け取り、レーダの戻ってきたデータに基づいた位置解を航法プロセッサへ提供するように構成される、地形相関プロセッサ(210)を有する、レーダ高度計(50)も含む。航法システム内の地図品質プロセッサ(202)は、デジタル標高地図から地図データを受け取り、地図品質ファクタを航法プロセッサへ提供するように構成され、航法プロセッサは、地図品質ファクタに従って、地形相関プロセッサからの位置解に重み付けを行い(256)、その地形相関プロセッサの重み付けされた位置解と、慣性航法ユニットからの位置解とから、位置解を決定する。  (もっと読む)
(もっと読む)
複数の情報源を有する監視ポータル
監視システム(20)は、被写体(32)を撮像するためのミリメートル波の電磁放射を用いて、人物(36)と、その人物(36)によって携行されている物体(38)とを含む被写体(32)を検問するように構成されている第1のセンサ装置(26)を含むことができる。補助情報源(30)が、人物(36)によって携行されている可能性のある物体(36)に関係付けることができる被写体(32)に関するさらなる情報を提供する。関係情報が、生成された画像信号(125)と被写体情報とを関係付ける。補助情報源(30)は、被写体位置(34)の人物(36)によって携行されている可能性のある物体(38)の所与の特性を検出するように適合されている第2のセンサ装置(26)とすることができる。次いで、所与の特性を有する物体(38)を人物(36)が携行しているかどうかに関する関係情報を生成することができる。 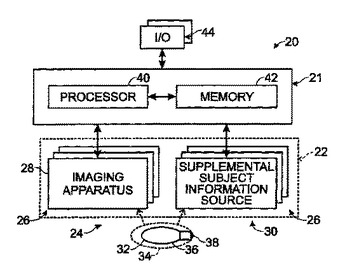 (もっと読む)
(もっと読む)
1 - 20 / 21
[ Back to top ]