
Fターム[5J070AB20]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | 連続波(CW) (917) | 位相変調(PM−CW) (30)
Fターム[5J070AB20]に分類される特許
1 - 20 / 30
レーダ装置
【課題】方位測定精度が向上されたレーダ装置の実現。
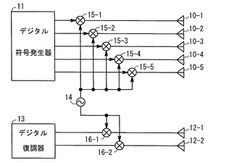
【解決手段】レーダ装置は、送信アンテナ10−1〜10−5と、デジタル符号発生器11と、受信アンテナ12−1、12−2と、デジタル復調器13を有している。デジタル符号発生器11は、擬似雑音符号A〜Cで変調された信号をそれぞれ5つに分配し、5つの信号の位相差をそれぞれ移相器114A〜Cにおいて制御し、それぞれ送信方向が水平面内であって車両前方右側、車両前方中央、車両前方左側となるように制御する。それぞれの移相器114A〜Cから出力される信号は、擬似雑音符号A〜Cで変調された信号ごとに重畳されて送出される。デジタル復調器13は、擬似雑音符号A〜Cを用いてそれぞれ信号を復調する。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法

【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラム
【課題】検知対象エリア内のどの場所に侵入者が存在するかを特定することが可能な侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知用子機102a,102b,102c,102dが送信する無線信号の送信エリアは、侵入検知用親機101の設置位置を含み、かつ侵入検知用子機102a,102b,102c,102d間で互いに異なる。侵入検知用親機101は、侵入検知用子機102a,102b,102c,102dからそれぞれ送信された無線信号を受信し、受信した各無線信号に基づいて、空間特徴量を無線信号ごとに算出し、算出した空間特徴量に基づいて無線信号に対応する送信エリアにおける人間の動作を検知する。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム
【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
侵入検知システム及び侵入検知装置
【課題】1名の設定作業者のみで容易に閾値調整を行うことを可能にする。
【解決手段】送信側漏洩伝送路2と受信側漏洩伝送路3との間に侵入物が侵入したときの上記受信電波の変動量を発報する発報手段5,6と、上記受信側漏洩伝送路を介して上記テーブル15の閾値を変更する信号を発生する遠隔操作部110とにより、閾値設定作業者による上記両伝送路間への試験的侵入による上記発報手段からの上記受信電波の変動量の発報に基づいて、上記遠隔操作部により上記ブロック毎に適正な閾値に調整されることを特徴とする
(もっと読む)
交信処理装置および交信処理装置における距離計測方法
【課題】交信処理の効率を損なうことなく、タグまでの距離を精度良く計測する。
【解決手段】コマンドが重畳された搬送波を送出する処理と無変調搬送波(CW)を送出してタグ2からの応答を受け付ける処理とを交互に実行する交信処理装置1において、送信制御部111は、タグ2からの反射波の受信が開始されたことに応じて送受信回路100から送出される無変調搬送波の位相を切り替える。送受信回路110には、タグ2からの反射波に含まれるI信号およびQ信号を分離して検出する回路が含まれており、位相検出部112は、I信号およびQ信号を用いて反射波の位相の変化を検出する。距離算出部113は、無変調搬送波の位相が切り替えられた時点から反射波の位相に無変調搬送波の位相の変化に対応する変化が検出される時点までの時間を計測し、その時間を用いてアンテナ10からタグ2までの距離を算出する。
(もっと読む)
レーダ装置
【課題】物標がアンテナのメインローブ方向に在るのか、あるいはサイドローブ方向に在るのかを比較的簡易な構成で判別できるようにしたレーダ装置を提供すること。
【解決手段】信号処理部100は、サイドローブの指向特性が異なる2つの受信アンテナRA1,TA2を選択的に切り替えて物標との距離を算出し、算出した距離が同一距離であって、その距離の算出の基礎とした各受信アンテナの受信レベルの差を判定する。
(もっと読む)
スクラップ表面プロファイル計測方法
【課題】容器内に積層されたスクラップ表面までの距離を適正に計測して容器内のスクラップの表面プロファイルを高精度に計測することができるスクラップ表面プロファイル計測方法を提供すること。
【解決手段】電磁波距離計測部11は、容器2内のスクラップ21表面上に、容器2内のスクラップ21のうちの大きいスクラップ21のサイズと同程度またはそれ以下の大きさのスポットが照射されるように調整されたビーム幅の電磁波をアンテナ111から送信し、アンテナ111によってその反射波を受信することで容器2内のスクラップ21表面までの距離を計測する。
(もっと読む)
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
(もっと読む)
変調装置、通信機及び近距離レーダ
【課題】変調信号への影響を従来よりも少なくし、変調の状態の変化にかかわらずローカルリークを除去することができる発信装置を提供する。
【解決手段】第1、第2のデータを生成する信号発生器13と、第1のローカル信号と該第1のローカル信号と逆相の関係にある第2のローカル信号を発生するローカル発振手段10と、前記第1データと前記第1のローカル信号から変調波を発生する第1の変調器1と、前記第2データと前記第2のローカル信号から変調波を発生する第2の変調器2と、前記第1の変調器1と前記第2の変調器2で発生した変調波を合成する合成器3とを備えている。
(もっと読む)
模擬クラッタ発生装置
【課題】 精巧な模擬クラッタ信号を生成し、レーダ表示器に供給表示できる模擬クラッタ発生装置を小型にすることを目的とする。
【解決手段】 統計データに基づく変調を個別の機能回路で行う場合、機能数だけ回路の増加となり大型化するので、周波数アキュムレータを用いたディジタル信号発生部を設け、ドップラ周波数情報、統計的データに基づく位相及び振幅変調情報、反射強度に応じた振幅情報を入力して、ディジタル信号にて各種変調を施した模擬クラッタ信号を発生させることで、信号発生、及び変調回路部の統合化による小型化を可能とする。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
距離測定装置
【課題】単一の送信機から発信される高周波信号を単一の受信機で受信し、両者間の相対距離を高精度で測定する。
【解決手段】単一の送信機から発信された少なくとも周波数が異なる複数の測定信号によって変調され、かつ/またはスペクトル拡散された高周波信号、光信号或いは超音波信号を単一の受信機で受信して復調し、かつ/または逆拡散し、周波数が最も低い測定信号と同期発振器33との同期を確立し保持した状態で、前記同期発振器33から出力されるクロック信号を用い、前記複数の測定信号の一部あるいは全部の位相および/あるいは周波数を位相・周波数検出器34によって検出することによって、両者間の相対距離を高精度で測定する。
(もっと読む)
近距離無線通信システム
本発明に係る近距離無線通信システムは、多数のアンテナを含み、アンテナを介して順次にエネルギー信号をシャワーするマスターRFID/USN装置と、シャワーされたエネルギー信号を用いて第1電源を生成し、第1電源の電力レベルを感知し、感知された電力レベルに従って生成された差別化された情報をマスターRFID/USN装置に伝達するスレーブRFID/USN装置を含み、マスターRFID/USN装置は、スレーブRFID/USN装置との通信に用いられたアンテナを識別して方向と関連したスレーブRFID/USN装置の第1位置情報を生成し、差別化した情報によって距離と関連した上記スレーブRFID/USN装置の第2位置情報を生成する。 (もっと読む)
距離測定装置
【課題】間に障害物があっても距離測定を可能とする距離測定装置を提供する。
【解決手段】第1の送受信機1000から第2の送受信機2000へ、周波数f1/MNの矩形波DTで周波数f1の搬送波をQPSK変調し、送信する。第2の送受信機2000は、コスタスループにより搬送波を再生し、矩形波D2を復調する。この後周波数f2(≠f1)の搬送波を生成して、復調した矩形波で周波数f2の搬送波をQPSK変調し、第2の送受信機2000から第1の送受信機1000へ逆送信する。第1の送受信機1000はここから周波数f1/MNの矩形波DRを復調する。矩形波DRをM逓倍し、矩形波DTを生成する1/M分周器15の入力である1/N分周器14との位相差を検出する。位相差は、第1の送受信機1000から第2の送受信機2000までの距離の2倍を電波が通過した時間差である。
(もっと読む)
送受信装置
【課題】ワンチップ化されたインパルス送信部とインパルス受信部とを有し、小型・低消費電力で測位、測距及びデータ通信が可能な送受信機を提供することを課題とする。
【解決手段】空間内における送受信機1の位置を測定することのできる測位システムに送受信機1を利用する場合、受信部20は、受信したインパルスラジオ信号を復調し、制御部30に送る。制御部30は、自機に対する指令であるか判定する。送信部10は、PN符号を用いて拡散変調処理及びRZ変換処理を実行し、測位システム側から要求された所定のデータをRZ変換して得るインパルスラジオ信号をアンテナ50から送信する。また、受信機1は、自機から特定の対象物に対して送信したインパルスラジオ信号を自機で受信し、その対象物との距離を測定することができる。このような測距処理に必要な演算は、制御部30で行われる。
(もっと読む)
遅延時間検出装置、遅延時間検出方法、遅延時間検出機および遅延時間検出プログラム
【課題】送信機100と受信機200の同期が不要で、かつ、直接波と反射波の到来方位を推定する必要がなく、直接波と反射波が混成した受信信号から直接波と反射波を識別でき、かつ、直接波と反射波との遅延時間差を検出できるようにすることを目的とする。
【解決手段】送信機100において変調器130が振幅変調と周波数変調と位相変調とのいずれかの変調を行い、送信器120が振幅と周波数と位相とのいずれかに特定の変化を有する送信波を送信アンテナ110を介して送信する。受信機200において受信器220が受信アンテナ210を介して送信機100からの直接波と目標物300で反射した反射波とそれ他の不要波とを混成波として受信し、復調器230が混成波を復調し、遅延時間検出器240が特定の変化を有する直接波と反射波とを混成波から識別し、直接波の受信時刻から反射波の受信時刻までの時間を送信波と反射波との遅延時間差として算出する。
(もっと読む)
車載用レーダ装置
【課題】本発明は、他車のレーダ装置による認識され易さ(被認識性或いは視認性)を向上させ、上記のような状況においても、他車のレーダ装置が自車両の存在を検出しやすくすることを目的とする。
【解決手段】送信手段から送信波を出力することによりターゲットから反射されてくる反射波を受信手段が受信し、反射波に基づいてターゲットとの距離や相対速度を検出する車載用レーダ装置において、他レーダ装置から送信された送信波を受信する手段と、当該受信波を自レーダから送信する手段を備えている構成とする。
(もっと読む)
監視装置
【課題】広範囲の監視を効率的に行うと同時に、複数の監視対象も的確に監視することができる監視装置を提供する。
【解決手段】ネットワーク5を介して駆動制御が可能な旋回カメラ4と、監視対象の位置を検出する位置検知センサ1と、位置検知センサ1からの検知情報に基づいて監視対象の位置を特定するセンサ情報処理手段2と、旋回カメラ4からの映像データを表示する映像表示部3aを有し、旋回カメラ4のうち、センサ情報処理手段2により特定された位置に対応する旋回カメラ4を選定し、ネットワーク5を介して選定した旋回カメラ4を駆動制御して監視対象を映像表示部3aに表示する監視端末3とを備える。
(もっと読む)
接近検知システム
【課題】ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得る。
【解決手段】周波数によって放射指向性が変化する漏洩ケーブル201から複数の周波数帯域の電波を送信する。計測手段141は、ターゲット400に反射して漏洩ケーブル211で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する。演算手段142は、各周波数帯域の反射波の信号強度と位相の情報に基づき、計測情報をターゲット400毎に分類し、電波送受信手段200の長さ方向のターゲット400の位置Zと電波送受信手段200との距離Rを算出する。
(もっと読む)
1 - 20 / 30
[ Back to top ]