
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
181 - 200 / 1,245
気象レーダ装置及び気象観測方法
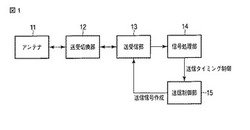
【課題】三次元気象データを一定の高い観測精度で取得すること。
【解決手段】本実施形態に係る気象レーダ装置は、複数のアンテナ素子を鉛直方向に配列したフェーズドアレイ方式のアンテナ11と、アンテナ11により各方位方向について複数の仰角方向に所定のヒット数のパルスを送信し、その反射波を受信する送受信部13と、上記仰角方向の変化に対して送受信部13で受信された信号のS/N(signal-to-noise ratio)と観測精度との関係に基づいて上記ヒット数を変更させる送信タイミング信号を生成する信号処理部14と、この送信タイミング信号に従って送信信号を作成する送信制御部15とを具備する。
(もっと読む)
電波受信装置及び信号分析方法

【課題】 電波を分析する際の処理を短縮させることが可能であり、かつ、ハードウェア規模の増大を抑えることが可能な電波受信装置及びこの装置で用いられる信号分析方法を提供する。
【解決手段】 電波受信装置は、アンテナ、RF受信器、IF受信器、検出処理器及び信号分析処理器を具備する。アンテナは、電波を受信する。RF受信器は、前記アンテナで受信した受信信号に対して振幅検波を行い、第1の検波結果を生成すると共に、前記受信信号をIF帯のIF信号へ変換する。IF受信器は、前記RF受信器からのIF信号に対して振幅検波及び位相検波を行い、第2の検波結果を生成する。検出処理器は、前記第1の検波結果をビデオ積分し、前記第2の検波結果に対してFFT(Fast Fourier Transform)を行う。信号分析処理器は、前記ビデオ積分の結果と前記FFTの結果とを参照し、前記電波の分析を行う。
(もっと読む)
検索システム
【課題】より低コストで検索対象の所在を知ることができる検索システムを提供する。
【解決手段】検索システム1は、検索対象の所在位置に対応付けられて設置されて信号を発信する発信機30と、発信機30の動作を制御するサーバと、発信機から送信される信号を受信する端末装置10と、を有し、端末装置10は、識別コードを送信すると共に発信機30から発信される電波を受信する通信部16と、発信機30からの電波に基づいて識別コードに対応する検索対象の所在位置に関する情報を報知する報知部17と、を備え、サーバ20は、端末装置10から送信された識別コードを受信する通信部26と、識別コードと発信機30とを対応付ける対応付け情報を記憶する記憶装置23と、識別コードと対応付け情報に基づいて当該識別コードと対応付けられた発信機を特定し、特定された発信機を動作させるCPU11と、を備える。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
レーダ装置
【課題】直列給電式のアレーアンテナを送受信アンテナとして用いたレーダ装置において、アンテナ素子の給電位相のずれを補正すること。
【解決手段】送信アレーアンテナ10の給電線路100は、終端において補正線路102に接続されている。送信アレーアンテナ10に隣接する受信アレーアンテナ11−1の、受電点側から数えて1つ目のアンテナ素子101aと、受電点との間の位置には、スイッチ103が設けられている。補正動作時には、スイッチ103によって、補正線路102と受信アレーアンテナ11−1の受電点とが接続され、受信アレーアンテナ11−1の受電点とアンテナ素子101aとの間が切断される状態となる。この補正動作時に補正線路102を介して受信した信号から位相変化量のずれを検出することができ、アンテナ素子101の給電位相のずれを補正することができる。
(もっと読む)
アンテナ装置及びレーダ装置
【課題】個々のスロットからの反射の帯域が広く、効率の良いアンテナ装置及びレーダ装置を提供する。
【解決手段】本実施形態によれば、アンテナ装置は、両面が第1及び第2金属膜に覆われた誘電体基板と、前記誘電体基板に2列に配列され、前記第1及び第2金属膜とで導波管線路を形成するスルーホール列と、前記第1金属膜に設けられたペアスロットと、を備える。前記ペアスロットは、スロット長方向が前記導波管線路の線路方向に対して斜めに設けられた第1スロット及び第2スロットを有する。前記第1スロットの中心と、前記第2スロットの中心とが、前記スロット長方向に沿って、前記第1スロットのスロット長さ及び前記第2スロットのスロット長さのうち短い方の2分の1以上離れている。
(もっと読む)
電子キーシステム
【課題】車室内の電子キーの位置を正確に特定することができる電子キーシステムを提供する。
【解決手段】電子キーシステム10では、車室内に向けてLFを送信するLF送信部42を備えた車載器30が車両に設けられ、電子キー20には、LFを受信するLF受信部22と、当該LF受信部22によって受信されたLFの強度を測定するLF受信強度測定部24と、当該LF受信強度測定部24によって測定されたLFの電波強度Vに応じたLFの強度情報を発信するUHF送信部26とを備える。この電子キーシステム10では、LFの強度情報に基づいて電気キー20の位置を特定することができ、車室内の電子キー20の位置を正確に特定することができる。
(もっと読む)
可視化装置および可視化システム
【課題】無線タグのリーダライタ装置が放射する電磁波の読み取り可能領域をユーザに直感的に知らせることができる可視化装置および可視化システムを提供する。
【解決手段】受信しようとする電磁波の約1/4波長の長さをもつ複数のアンテナ1,2と、複数のアンテナに一端および他端がそれぞれ接続される整流素子4と、一端が複数のアンテナの一方に、他端が整流素子に接続される発光ダイオード5を有する可視化装置。
(もっと読む)
追尾装置
【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
部材の位置管理システム及び部材の位置管理方法
【課題】ある部材(特定部材)の位置の特定を行うときに、特定部材の周辺に位置していて特定部材とは異なる他の部材の位置情報を利用することによって、特定部材の位置の管理を行い易くする。
【解決手段】本発明に係る部材の位置管理システム1は、部材IDが記録されたRFIDタグ3と、タグリーダ4と、位置情報データベース5と、この位置情報データベース5を用いて部材2の位置を決定する位置決定手段6とを備えている。タグリーダ4は、位置を特定しようとする部材2である特定部材2aの部材IDと、特定部材2aの周辺に位置していて特定部材2aとは異なる他の部材2bの部材IDとを同時又は異時に取得するように構成されている。位置決定手段6は、タグリーダ4で取得した他の部材2bの部材IDと位置情報データベース5とに基づいて、他の部材2bの位置情報を求め、求めた他の部材2bの位置情報を特定部材2aの位置情報として適用する。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
航法補完装置およびレーダ装置
【課題】本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関し、従来例に比べて構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和し、または回避できることを目的とする。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
(もっと読む)
地雷探索装置、地雷探索方法
【課題】安全かつ、速やかに地雷を探知・除去するための地雷検出装置を提供する。
【解決手段】空中を飛行する飛行手段と、現在の位置を検出する位置検出手段と、予定される飛行経路に関する情報を記録する第1の記録手段と、前記検出された位置及び飛行経路に関する情報から飛行方向を補正する信号を生成する生成手段と、前記生成された信号に基づいて飛行を制御する制御手段と、飛行中に地雷を探索する探索手段と、探索結果を探索した位置と対応付けて記録する第2の記録手段と、を有する。予め自動航行により飛行した範囲内での地雷の探索結果が探索位置と対応付けられて記録されることにより、作業者は後日地雷が検出された場所のみに赴き地雷除去作業を完了させることで、安全が確認された領域を素早く現地住民に開放することができる。
(もっと読む)
イメージング装置及び送受信装置
【課題】 測定時間を短縮したイメージング装置及びこれに用いられる送受信装置を提供すること。
【解決手段】 本イメージング装置100は、対象物に対し、複数のパルスが櫛状に配列された櫛状波を含む送信信号を送信する送信部20と、送信信号の反射信号を受信する受信部30と、反射信号から画像情報を生成する画像情報生成部11と、を備える。対象物に送信する送信信号として櫛状波を用いることにより、1度の測定において複数の周波数成分に関する対象物の情報を得ることができる。これにより、周波数掃引を行う必要がなくなるため、測定時間の短縮を図ることができる。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
存在位置検出システム
【課題】監視対象近傍の環境調整機器を容易に把握することができる存在位置検出システムを提供する。
【解決手段】監視領域内の監視対象10の近傍から、送信側属性情報を送信する属性情報送信部11a等と、監視領域内で互いに異なる領域の各々に設けられた属性情報受信部12a等と、送信側属性情報を受信した属性情報受信部12a等が設けられた領域内の環境調整機器4等の機器側属性情報に、送信側属性情報を対応付ける存在位置管理部14と、を備えた。これにより、監視対象近傍10の環境調整機器4等を容易に把握することができる。
(もっと読む)
降雨観測設備の投資計画評価方法
【課題】降雨レーダと地上雨量計との補完関係を考慮して降雨観測設備の投資計画を評価することにより、降雨レーダの設置位置の見直しや地上雨量計の追加など最適な設備投資計画に資する方法を提供する
【解決手段】降雨観測設備1は、ダム流域から離れた任意の位置に配置される降雨レーダ2と、ダム流域内に配置される地上雨量計3とから構成される。降雨レーダ2からのビームがダム流域までの間に存在する地形遮蔽物を越える最小仰角αで発射される条件の下で、ダム流域上に到達するビーム高度に応じてダム流域を区分するとともに、各ダム流域をその流域内に設置された各ダム毎の流域に細分化し、この細分化した各ダム毎の流域について既設の地上雨量計3の配置数をその残流域面積で除した地上雨量計設置密度に応じて区分し、前記ビーム高度に応じた区分と地上雨量計設置密度に応じた区分との関係から、降雨観測設備1の投資計画を評価する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
イベント検出装置
【課題】電波の状態を監視することによって、そこに存在する人や物の状態の違いをも識別することができる高い精度を持つイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルを入力して状態を判別するSVM(サポートベクターマシン)24と、SVM24の出力の連続性を考慮してイベントを検出するイベント検出手段25と有するイベント検出装置。
(もっと読む)
181 - 200 / 1,245
[ Back to top ]