
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
301 - 320 / 1,245
位相情報を用いたサブミリ波レーダー
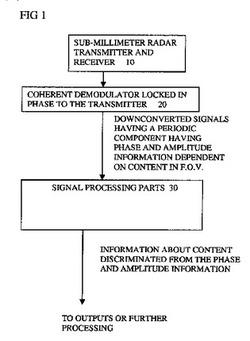
サブミリ波長アクティブレーダーシステム(10、20、30)のための信号処理装置(30)は、レーダーシステムによって受信されダウンコンバートされた信号を処理する。このダウンコンバート信号は、時変振幅とコンテンツに依存する周期的成分を有する位相成分とを有する視野中の所定のピクセルに対応する。コンテンツに関する情報は、周期的成分から識別される。振幅のみよりも位相を使用することによって、ダウンコンバート信号中に追加の情報が存在する。位相は、振幅のみよりも、オブジェクト、バックグラウンド及び大気条件のような、コンテンツ中の変化により敏感である。位相情報は、周期的成分が保持されることを可能とする。この周期的成分は、コンテンツフラター、サブミリ波定常波における変化、および、もし表面層が複数の半波長の厚さを有している場合、サブミリ波放射の受信された反射中における干渉縞に原因して、コンテンツに特有であり得る。 (もっと読む)
複数の角度から反射された信号を使用するサブミリ波レーダー

サブミリ波長レーダーシステムは、システムの視野内のコンテンツからの信号を受信し且つダウンコンバートするための受信器(20、27、90)と、ダウンコンバートされた信号からコンテンツに関する情報を決定するように構成された信号処理装置(30)とを備え、このレーダーシステムは、複数の照射または受信位置を有することによって異なる照射または受信角度から視野内の同じ点の信号を獲得するように構成され、且つ前記信号処理装置はコンテンツの位置または方向を決定するために、2個のまたはそれ以上の角度からの信号から決定された情報を使用するように構成されている。異なる角度からの情報を使用することによって、殆どの反射が鏡面反射性であってそのためレーダーシステムに向うオブジェクトの表面のみが検出可能であり、これは、多くのオブジェクトが認識可能ではないことを意味する、サブミリ波長の欠点に対処すること、即ち克服することが可能となる。 (もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
最適位置算出装置、最適位置算出方法およびプログラム
【課題】任意のタイミングで、高精度、かつ、軌道が滑らかな航空機情報を表示する技術を提供する。
【解決手段】最適位置算出装置20は、複数のセンサのそれぞれによって観測された観測データに基づく航空機情報を記憶する航空機情報記憶部210と、前記複数のセンサのうち2以上のセンサを優先センサとして特定するための優先センサ情報を各観測領域に対応付けて記憶する優先センサ情報記憶部200と、航空機の表示位置の更新タイミングにおいて、前記優先センサ情報に基づいて、複数の前記航空機情報のなかから、前記優先センサによって観測された最新の観測データに基づく前記航空機情報を抽出するセンサ選択部240(航空機情報抽出部)と、抽出された前記航空機情報に基づいて、前記更新タイミングにおける航空機の最適位置を算出する最適位置算出部250と、前記最適位置を出力する表示部260(出力部)とを備える。
(もっと読む)
車両の周囲状況を表す方法
本発明は、車両(5)の周囲状況を表す方法に関しており、ここでは、車両(5)の周囲にある対象体をセンサによって検出し、それぞれ検出した対象体を2つの座標点(11,13)と、各座標点(11,13)に割り当てられた位置曖昧さ(15)とによって表し、これらの座標点(11,13)および位置曖昧さ(15)をインタフェースにデータとして記憶し、このインタフェースには車両(5)の走行アシストシステムがアクセス可能である。本発明はさらに車両(5)と対象体との衝突確率を求める方法に関しており、ここではまず上記の車両(5)の周囲を表す方法を使用して車両(5)の周囲を表し、つぎのステップでは上記の位置曖昧さ(15)を考慮して、この車両(5)が走行するチューブ状走行パス(23)を求め、続いて対象体とチューブ状走行パス(23)との重なり度を求め、ひいては衝突確率を求める。 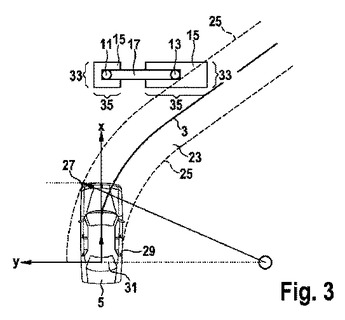 (もっと読む)
(もっと読む)
無線タグシステムおよびそのタグリーダならびにタグ管理サーバ
【課題】案内情報などが登録されて屋外や屋内の適所に配置されるパッシブRFタグの位置を利用者が簡単に認識して所望の情報を確実に得られるようにした無線タグシステムおよびそのタグリーダならびにタグ管理サーバを提供する。
【解決手段】複数のパッシブRFタグ2が分散配置された地域には、当該地域をカバレッジとするアクティブRFタグ1が配置されている。このアクティブRFタグ1からは、自身のカバレッジ内に配置されている多数のパッシブRFタグ2(2a,2b…)の位置情報を取得するための識別情報が周期的に送信される。携帯端末3は、アクティブRFタグ1から識別情報を取得し、これを位置要求メッセージに記述して所定の管理サーバへ送信すると、当該管理サーバから前記位置情報の添付された位置応答が返信され、その表示部に表示される。
(もっと読む)
障害物検知装置
【課題】障害物に明部と暗部が存在し、障害物の連続する輪郭が明部と暗部にまたがって存在する場合でも誤検知の少ない安定した障害物検知を可能とする障害物検知装置を提供する。
【解決手段】撮像画像から障害物検知のための処理画像を生成する処理画像生成部と、処理画像を複数の小領域に分割する小領域分割部と、複数の小領域と処理画像の画素値から小領域毎のエッジ閾値を設定するエッジ閾値設定部と、複数の小領域と処理画像から小領域毎の濃淡勾配値を算出し、算出された濃淡勾配値に対応する小領域のエッジ閾値を用いて、エッジ画像と勾配方向画像とを生成するエッジ抽出部と、エッジ画像内で設定されたマッチング判定領域内のエッジ画像及びエッジ画像に対応する勾配方向画像から障害物の有無を判定する障害物認識部と、を有し、小領域分割部は、自車外の照明状態に基づいて処理画像を複数の小領域に分割する障害物検知装置。
(もっと読む)
レーダ装置
【課題】超分解能ドップラー周波数の推定精度を改善したレーダ装置を得る。
【解決手段】複数の送信パルスを時系列的に繰り返し出射する送信機1、送信アンテナ2と、複数の送信パルスが目標3で反射された反射パルスを複数の受信パルスとして受信する受信アンテナ4、受信機5と、複数の受信パルスに基づいて、目標3の移動にともなうドップラー周波数を推定する超分解能ドップラー周波数推定手段8とを備えている。超分解能ドップラー周波数推定手段8は、複数の受信パルスの位相変化に基づいて、ドップラー周波数を超分解能推定する。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
アレーアンテナ装置及びレーダ装置
【課題】可視領域の広域化を図りつつ、アンテナ素子の素子間隔を広くすることのできるアレーアンテナ装置及びこのアレーアンテナ装置を用いてターゲットを検知するレーダ装置を提供する。
【解決手段】当該レーダ装置1にて使用される電波の波長をλとした場合に、送信アンテナ素子14a〜14eの素子間隔Dtを波長λの「0.9倍」に設定し、受信アンテナ素子15a〜15cの素子間隔Drを波長λの「1.5倍」に設定することで、送信アンテナ素子14a〜14eの素子間隔Dt及び受信アンテナ素子15a〜15cの素子間隔Drには「素子間隔Dr=素子間隔Dt×1.5」との関係を設定した。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
リアルタイム測位システムにおけるデータベースの負荷低減方法
【課題】リアルタイム測位システムにおけるデータベースの負荷を低減する。
【解決手段】
携帯装置を測位するよう動作可能な測位システムおよび方法は、無線信号を送信するよう動作可能な携帯装置を備える。無線ネットワークが、無線信号を受信し、携帯装置の位置を推定するために使用されるデータを報告するために使用される。測位サーバーが、無線ネットワークによって報告されたデータを無線ネットワークによって処理するために使用される。測位サーバーは、携帯装置に対して複数の測位レポートを生成する。前処理構成要素が測位サーバーと通信するよう動作可能である。測位サーバーによって生成された測位レポートは前処理構成要素に転送される。測位アプリケーションが、前処理構成要素と通信するよう動作可能であり、携帯装置に関する記録を保存するよう動作可能なデータベースとインタフェース接続する。前処理構成要素は、測位レポートを処理し、データ記録中のデータが規定された基準を満たす場合にのみデータ記録を保存する。 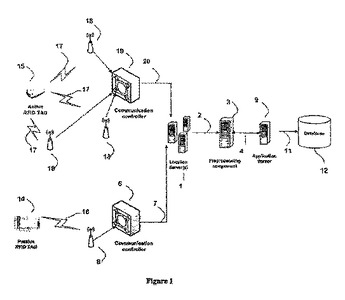 (もっと読む)
(もっと読む)
レーダ信号処理装置
【課題】本発明は、気象レーダの観測局から引き渡された観測データに基づいて3次元における雲の分布を求めるレーダ信号処理装置に関し、雷監視システムから通知された情報を活用することにより、雲放電や対地放電が発生した地点や空間を的確に識別できることを目的とする。
【解決手段】雷監視システムから与えられ、かつ雲放電が発生した位置を示す雷監視情報を取得する雷情報取得手段と、気象レーダの観測局から引き渡され、かつ地理的な位置毎に前記観測局によって計測されたエコー強度の鉛直方向における分布に、前記雷監視情報で示される位置におけるエコーの頂部を印す雷マーク手段とを備える。
(もっと読む)
レーダ装置
【課題】検知範囲内に位置するターゲットの検知精度を向上することのできるレーダ装置を提供する。
【解決手段】レーダ装置1を構成するマイコン10は、まず、ステップS10の処理として、受信アレーアンテナ15のヌル点をヌル点NL1〜NL11のうちの1つに設定し、受信アレーアンテナ15のヌル点が設定された状態で受信された受信信号RをRAM等に記憶する。次に、マイコン10は、上記ヌル点NL1〜NL11すべてに対してこうした一連の処理を順次実行する。そして、マイコン10は、上記ヌル点NL1〜NL11に対する受信信号Rを順次記憶すると、これら記憶した受信信号Rの加算平均を算出する。
(もっと読む)
物体検出装置
【課題】レーダによって取得されるレーダ物標情報とカメラによって取得される画像物標情報とをフュージョンさせることで物体を検出する物体検出装置において、物体の検出精度をより向上させる。
【解決手段】レーダによって認識された物標の位置から、レーダの受信波の強度に応じて設定された所定の横幅の範囲内にある画像物標情報のみを用いて、レーダ物標情報と画像物標情報とをフュージョンさせる。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
物体検出システム
【課題】レーダー及び立体視センサーを含む物体検出システムを提供する。
【解決手段】物体検出システムは、レーダー信号が送信される少なくとも一つの開口及び反射したレーダー信号が受信される少なくとも一つの開口を備えるレーダーシステムを含む。検出システムは、第1のセンサー及び第2のセンサーを含む立体視システムも含む。第1のセンサー及び第2のセンサーは、オフセットにより分離される。立体視システムは、単一のアセンブリを形成するためにレーダーシステムに取り付けられる。レーダーシステムは、第1のセンサーと第2のセンサーとの間のオフセット内に設置される。
(もっと読む)
新規なセンサフュージョン手法を用いた、移動体の状態推定のための装置、方法、およびプログラム
【課題】さまざまな異なる環境に適用できる状態推定系を実現する。
【解決手段】系の状態を推定するための装置であって、(a) ひとつ以上の第一のセンサと、(b) ひとつ以上の第二のセンサと、(c) ひとつ以上の第一のセンサのいずれかから各々が出力を受けて記憶手段に格納する複数の下位モジュールとを含み、下位モジュールが有する記憶手段は下位モジュールの各々に対応する地図と、系の状態を推定するための情報でありひとつ以上の第二のセンサのいずれかの出力から生成され第一のセンサのいずれかの出力と地図とに基づいて更新をされる第一のデータセットとを有し、さらに(d) 複数の下位モジュールの各々から出力された第一のデータセットを受けとり下位モジュールの各々に第一のデータセットの改善を行わせ第一のデータセットを統合し系の状態を推定して下位モジュールの各々へフィードバックする上位モジュールを含む。
(もっと読む)
301 - 320 / 1,245
[ Back to top ]