
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
61 - 80 / 1,245
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
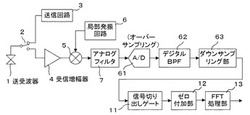
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
処理装置

【課題】ATCRBSトランスポンダが送信した応答信号がモードAコード又はモードCコードのいずれであるかを容易に識別する。
【解決手段】処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出する。また、抽出した物体単位データの中から、車幅方向の距離が最も自車側に位置する停止物体の横位置を抽出すると共に、車幅方向において最も自車側の停止物体の横位置から所定距離だけ離れた範囲内に位置し、かつ、自車からの直接の距離が最も小さい停止物体を起点に決定する。そして、接続条件として距離が単調増加であるデータ同士を起点から接続してグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
二次監視レーダ
【課題】航空機の監視に加え、気象情報を容易に収集する。
【解決手段】モードS二次監視レーダは、航空機に質問信号を送信し、当該質問信号に応答して航空機から送信された応答信号を受信して航空機の飛行を監視する二次監視レーダであって、送信手段と、受信手段と、気象情報取得手段と、位置特定手段と、出力手段とを有する。送信手段は、ロールコール期間にGICBレジスタの気象情報の送信要求を含む質問信号を送信する。受信手段は、航空機から質問信号に応じて送信された応答信号を受信する。気象情報取得手段は、前記受信手段が受信した応答信号から、GICBレジスタの気象情報を取得する。位置特定手段は、前記受信信号が受信した応答信号から、航空機の位置情報を特定する。出力手段は、前記気象情報取得手段で取得された気象情報を、前記位置特定手段で算出された位置情報と関連づけて出力する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】送信波照射に対する反射波に基づいて、少なくとも物体までの距離を含む物体単位データを車幅方向角度に対応して取得する。そして、反射波に基づいて得た物体の相対速度及び自車速に基づいて移動物か停止物という認識種別を判定し、認識種別の判定結果に基づいて、移動物の中から自車両180に対する先行車181及び先々行車182の各物体単位データを抽出し、停止物の中から道路に沿って設置された反射体の各物体単位データを抽出する。この後、自車両180、先行車181、及び先々行車182の各物体単位データを用いてこれら3点を円で近似することにより当該円の半径を算出し、円の半径と、反射体の列と、に基づいて道路形状を認識する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、各探知領域内の強度が所定値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅及び位置を算出する幅・位置算出手段33と、各物体の幅及び位置に基づき、装置の前方に、各探知領域と交差する路面が存在し、各探知領域における物体範囲が分離していると判定された場合、物体範囲の分離している部分に対応する画像データに基づき、検知対象である目的物の有無を検出する目的物検出手段39とを備える。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
広域マルチラテレーションシステム及び受信装置
【課題】航空機から送信される信号を効率的に検出する。
【解決手段】広域マルチラテレーションシステムで利用される前記受信装置は、質問受信部と、質問信号解析部と、応答受信部と、利得調整部と、出力部とを備える。質問受信部は、二次監視レーダから航空機に送信された質問信号を受信する。質問信号解析部は、前記質問受信部で受信した質問信号から、前記二次監視レーダが質問を送信するタイミングを求める。応答受信部は、航空機から送信された信号を受信する。利得調整部は、前記応答受信部で受信された信号に、前記質問信号解析部で求められたタイミングに応じて信号の利得を調整する。出力部は、前記利得調整部で利得が調整された信号を航空機の位置の測定に使用するデータとして前記位置測定装置に出力する。
(もっと読む)
広域撮影制御システム
【課題】航空機等に搭載したレーダセンサにより広域災害における画像収集を行う際に、撮影計画外の目標を撮影する必要が後から生じた場合でもパイロットの負担を軽減するとともに迅速に撮影することができる広域撮影制御システムを提供する。
【解決手段】飛しょう体に搭載され、上空から地上を撮影するレーダ1と、飛しょう体の位置情報を自機位置情報として収集するセンサ位置情報収集部23と、飛しょう体に搭載され、レーダ1の撮影目標の位置を示す撮影目標位置情報と飛しょう体の通過目標の位置を示す通過目標位置情報とを含む撮影計画とセンサ位置情報収集部23により収集された自機位置情報とに基づいてレーダ1を制御する撮影制御部26と、地上側に設置され、新たな撮影目標の撮影目標位置情報を送信する目標位置情報送信部31と、飛しょう体に搭載され、目標位置情報送信部31により送信された撮影目標位置情報に基づいて撮影計画の通過目標位置情報を更新する再撮影計画部25とを備える。
(もっと読む)
立体映像対応型ICカード処理装置
【課題】選択対象物を立体映像で表示する表示区画部を有し、ICカードのタッチ行為位置とリーダ・ライタの読書き可能位置とを一致させ、読込み・書込みを行えるようにする。
【解決手段】この装置は、立体映像で表示する表示区画部21A、非接触ICカード25が表示区画部の正面位置にかざされたときに非接触ICカードの第1の位置情報(X,Y)を検出するためアンテナ22、非接触ICカードとの間で読書きを行うリーダ・ライタ23、表示区画部の位置の情報、選択対象物に係る立体映像の表示位置の情報を記憶する記憶部24、表示区画部に対してタッチ行為がなされた非接触ICカードの表示区画部からの第2の位置情報(Z)を検出する距離画像検出装置20B、第1と第2の位置情報(X,Y,Z)が記憶された立体映像の表示位置と一致したとき選択対象物を確定しリーダ・ライタで非接触ICカードの情報の読書きを行う処理装置20Cを備える。
(もっと読む)
車両用制御対象物判定装置
【課題】上方物は下方物といった非制御対象物に対し車体制御に必要か否かを判定することが可能な車両用制御対象物判定装置を提供する。
【解決手段】上下方向に異なる高さに設定された複数のレイヤに基づいて車両前方の物体を検出する物体検出手段と、物体検出手段により各レイヤにて得られた複数の検出点データを結合し、一つの物体として認識するグルーピング手段と、を備えた車両用制御対象物判定装置において、グルーピング手段は、複数のレイヤの各々の検出点データの個数の差が所定以上である場合は、検出点データの個数の差が所定以上である各レイヤにて検出された検出点データをグルーピングすることなく、それぞれ別の物体であると認識する。
(もっと読む)
物体検出装置
【課題】物体の検出精度を向上させる。
【解決手段】物体検出装置10の物標対象位置推定部25は、レーダ装置11から出力された前回のフレームのデータに対して物標対象生成部23により生成された物標対象の今回のフレームにおける推定位置EPを推定する。距離算出部27は、推定位置EPと今回のフレームにおいて物標対象生成部23により生成された複数の物標対象の各実位置APとの距離を算出する。探索領域設定部28は、距離算出部27により算出された距離が最も短い物標対象を基準物標対象SMとし、基準物標対象SMの実位置APを基準位置SPとした所定範囲を探索領域IAとして設定する。物標統合部29は、今回のフレームの複数の物標対象のうち、探索領域IA内に存在する複数の物標対象を統合して単一の物標対象とし、単一の物標対象を前回のフレームの物標対象と同一であると認識する。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
道路形状推定装置
【課題】自車両が走行する道路の形状を従来より正確に推定可能とする道路形状推定装置を提供する。
【解決手段】自車両に搭載され、当該自車両が走行する道路の形状を推定する道路形状推定装置であって、自車両周囲の静止物の存在位置を複数の検出点として検出する物体検出部と、複数の検出点同士を第1の接続方法により線分で順次接続することによって、道路の形状を示す接続線を形成する接続線形成部と、接続線の一部または全部の区間が所定の条件を満たす形状を成している場合、当該区間を、道路に沿って路側静止物が二重に配置された二重路側物配置区間として認識する二重区間認識部と、二重路側物配置区間が検出された場合、当該二重路側物配置区間に含まれる複数の検出点を第2の接続方法により接続し直して接続線を修正する接続線修正部と、接続線に基づいて道路の形状を推定する道路形状推定部とを備える、道路形状推定装置である。
(もっと読む)
情報表示装置
【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
指示支援装置
【課題】本発明は、目標から到来した反射波で示される画像の分解能の向上を図る高分解能処理の対象を設定する指示支援装置に関し、構成が大幅に複雑化することなく高分解能処理の処理量を削減できることを目的とする。
【解決手段】到来した反射波で示される画像の内、前記画像に含まれる見かけ上の目標が位置する領域もしくは部位を抽出する抽出手段と、前記領域または前記部位を分解能の向上を図る高分解能処理の対象とする制御手段とを備える。
(もっと読む)
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
(もっと読む)
61 - 80 / 1,245
[ Back to top ]